Toyota Toyota Touch & Go - PZ490-00331-*0 - Toyota Touch & Go - Toyota Touch & Go Plus - Turkish - mode d'emploi
Toyota Toyota Touch & Go - PZ490-00331-*0 - Toyota Touch & Go - Toyota Touch & Go Plus - Turkish - mode d'emploi
Toyota Toyota Touch & Go - PZ490-00331-*0 - Toyota Touch & Go - Toyota Touch & Go Plus - Turkish - mode d'emploi

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3. ROTA YÖNLENDİRMESİ<br />
HEDEF EKLEME<br />
Rotaya hedefler eklenebilir ve rota<br />
buna göre değiştirilebilir.<br />
1 “Navigation” menü ekranını görüntülemek<br />
için, haritadaki “NAV” simge-sine<br />
dokununuz veya “MAP NAV” düğmesine<br />
basınız.<br />
Hedefi “Enter address” (Adres Gir)<br />
yöntemi ile arıyorsanız<br />
5 “Add as stopover” kısmına dokununuz.<br />
Hedefi “Select point on map”<br />
(Haritada Nokta Seç) veya “Enter<br />
geocoordinates” (Koordinat Gir) işlevi<br />
ile arıyorsanız<br />
5 “Add” kısmına dokununuz.<br />
Hedefi diğer yöntemlerle arıyorsanız<br />
5 İstediğiniz kayda dokununuz.<br />
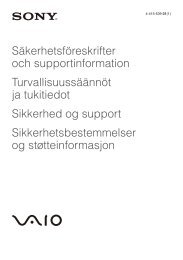
6 Mola yerinin konumunu seçmek için<br />
“Insert stopover” kısmına dokununuz.<br />
• “Navigation” menü ekranı görüntülenmiyorsa,<br />
ekran görüntülenene dek<br />
simgesine dokununuz.<br />
2 “Enter destination” kısmına dokununuz.<br />
• “Navigation” ekranlarındaki simgesine<br />
dokunularak “Enter destination” ekranı<br />
görüntülenebilir.<br />
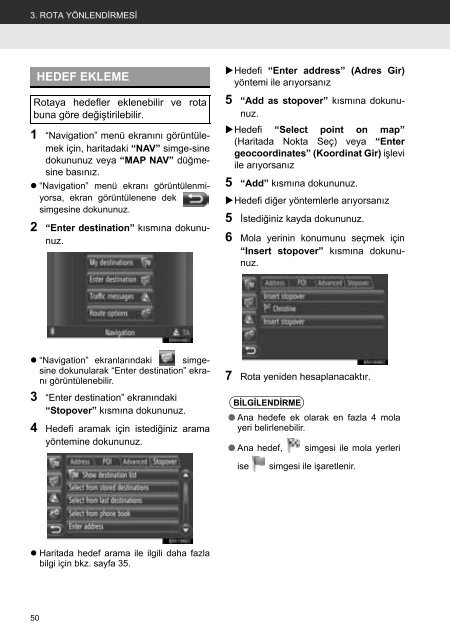
3 “Enter destination” ekranındaki<br />
“Stopover” kısmına dokununuz.<br />
4 Hedefi aramak için istediğiniz arama<br />
yöntemine dokununuz.<br />
7 Rota yeniden hesaplanacaktır.<br />
BİLGİLENDİRME<br />
● Ana hedefe ek olarak en fazla 4 mola<br />
yeri belirlenebilir.<br />
● Ana hedef,<br />
simgesi ile mola yerleri<br />
ise<br />
simgesi ile işaretlenir.<br />
• Haritada hedef arama ile ilgili daha fazla<br />
bilgi için bkz. sayfa 35.<br />
50