Predavanje 8 - PBF
Predavanje 8 - PBF
Predavanje 8 - PBF

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Ž. Kurtanjek: Automatizacija 2007<br />
OSNOVNI POJMOVI<br />
UVOD U AUTOMATIZACIJU PROCESA<br />
Teorija automatizacije procesa zasniva se na matematičkoj definiciji sustava. Sustav se<br />
definira kao izdvojeni dio okoline koji obavlja određenu svrhu. Pojam sustav se vrlo često<br />
upotrebljava s različitim smislom, ali u teoriji automatizacije procesa sustav definiramo<br />
kao svrhoviti tehnički sustav koji proizvodi.<br />
Osnovni pojmovi kojima se definira sustav su:<br />
- svrha sustava<br />
- granice sustava i okoline<br />
- ulazne veličine, veličine stanja, izlazne veličine<br />
- dijelovi sustava ( podsustavi )<br />
- struktura koja povezuje podsustave<br />
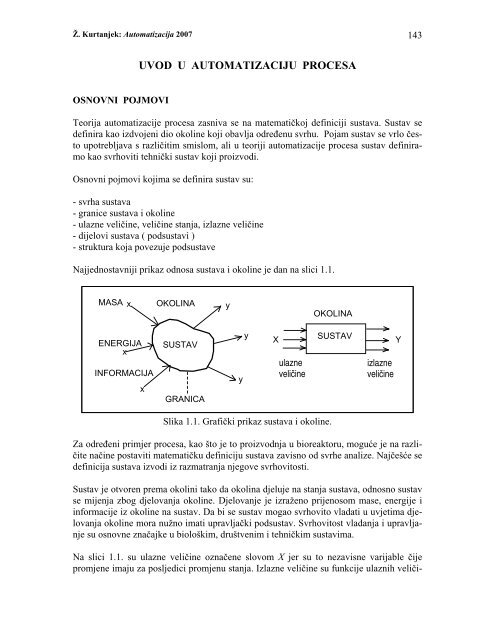
Najjednostavniji prikaz odnosa sustava i okoline je dan na slici 1.1.<br />
MASA<br />
x<br />
ENERGIJA<br />
x<br />
INFORMACIJA<br />
x<br />
OKOLINA<br />
SUSTAV<br />
GRANICA<br />
y<br />
y<br />
y<br />
X<br />
ulazne<br />
veličine veli~ine<br />
Slika 1.1. Grafički prikaz sustava i okoline.<br />
OKOLINA<br />
SUSTAV<br />
Y<br />
izlazne<br />
veličine<br />
veli~ine<br />
Za određeni primjer procesa, kao što je to proizvodnja u bioreaktoru, moguće je na različite<br />
načine postaviti matematičku definiciju sustava zavisno od svrhe analize. Najčešće se<br />
definicija sustava izvodi iz razmatranja njegove svrhovitosti.<br />
Sustav je otvoren prema okolini tako da okolina djeluje na stanja sustava, odnosno sustav<br />
se mijenja zbog djelovanja okoline. Djelovanje je izraženo prijenosom mase, energije i<br />
informacije iz okoline na sustav. Da bi se sustav mogao svrhovito vladati u uvjetima djelovanja<br />
okoline mora nužno imati upravljački podsustav. Svrhovitost vladanja i upravljanje<br />
su osnovne značajke u biološkim, društvenim i tehničkim sustavima.<br />
Na slici 1.1. su ulazne veličine označene slovom X jer su to nezavisne varijable čije<br />
promjene imaju za posljedici promjenu stanja. Izlazne veličine su funkcije ulaznih veliči-<br />
143
Ž. Kurtanjek: Automatizacija 2007<br />
na i zato su označene s slovom Y. Stanja sustava su funkcije ulaznih veličina, tako da<br />
možemo pisati: Y = Y ( X ).<br />
Napomena: Na slici 1.1. strelice koje pokazuju iz sustava na okolinu, označene slovom Y,<br />
nisu izlazni tokovi , već su to izlazne veličine.<br />
Matematička definicija sustava zasniva se na definiranju ulaznih i izlaznih veličina<br />
i stanja. Te veličine proizlaze iz definicije svrhovitosti sustava i rezultat su apstrakcije.<br />
Vladanje realnih sustava se aproksimira s matematičkim modelima, odnosno matematički<br />
definirani sustavi opisuju samo najbitnije odnose okoline i sustava s obzirom na definiciju<br />
svrhe. Realni sustavi su uvijek složeniji od matematičkih modela, ali se razlike mogu<br />
postići po volji malenim unapređenjem modela i usavršavanjem mjerenja svojstava realnih<br />
sustava. Teorija automatizacije se zasniva na analizi svojstava i algoritama upravljanja<br />
matematičkih modela sustava.<br />
Definicije osnovnih veličina:<br />
Ulazne veličine X:<br />
Ulazne veličine su skup vremenski promjenljivih i međusobno nezavisnih veličina X(t)<br />
koje jednoznačno određuju djelovanje okoline na promatrani sustav. Ulazne veličine određuju<br />
prijenos mase, energije i informacije iz okoline u sustav.<br />
Napomena: Važno je uočiti da ulazne veličine nisu isto što i ulazni tokovi za neki promatrani<br />
proces. Vrlo često mogu izlazni tokovi iz procesa biti ulazne veličine.<br />
Veličine stanja Y:<br />
Veličine stanja su skup vremenski promjenljiv i međusobno nezavisnih veličina Y(t) koje<br />
u potpunosti opisuju bitne dinamičke promjene sustava. Veličine stanja mogu biti fizičke,<br />
kemijske, biološke, informacijske itd. Vladanje sustava u svakom trenutku Y(t) je jednoznačno<br />
određeno početnim stanjem, Y o = Y(t=0) i promjena ulaznih veličina X(t).<br />
Veličine stanja određuju prostor stanja u kojem svaka točka predstavlja jedno od mogućih<br />
stanja. Broj veličina stanja određuje dimenziju prostora. Kada su veličine stanja kontinuirano<br />
raspodijeljene u prostoru broj veličina stanja i dimenzija prostora su beskonačni.<br />
Same veličine i prostor stanja su apstraktna svojstva matematičkih sustava, odnosno<br />
matematičkih modela realnih procesa.<br />
Izlazne veličine Z:<br />
Izlazne veličine su funkcije veličina stanja, Z(t) = f ( Y(t) ), i jednoznačno i bitno određuju<br />
svrhu i djelovanje sustava na okolinu.<br />
Uvid u osnovnu strukturu sustava definiranog za svrhoviti proizvodni proces možemo<br />
uočiti na primjeru proizvodnje u biokemijskom reaktoru ( slika 1.2 ).<br />
144
Ž. Kurtanjek: Automatizacija 2007<br />
masa,<br />
energija<br />
X Y i/ili Z<br />
informacija<br />
SUSTAV<br />
upravljački upravlja~ki procesni<br />
podsustavi<br />
podsustav podsustav<br />
izlazne izlazna<br />
veličine veli~ina<br />
Slika 1.2 Prikaz sustava za upravljanje rada bioreaktora s računalom i<br />
čovjekom u povratnoj vezi<br />
Proizvodnja u bioreaktoru je upravljani proces tako da se mogu jasno uočiti zasebne cjeline<br />
koje možemo identificirati kao podsustavi za upravljanje i procesni podsustav. Upravljački<br />
podsustav sastoji se od bitnih elemenata koji omogućavaju upravljanje bioreaktora,<br />
a procesni podsustav je bioreaktor u kojemu dolazi do biokemijske transformacije<br />
uz pomoć mikroorganizama. Procesni i upravljački podsustav imaju složenu građu, dakle<br />
definirani su svojim podsustavima.<br />
Struktura procesnog sustava je u ovom primjeru određena značajkama bioreaktora<br />
i mikroorganizama, odnosno u općem slučaju je određena svim tehnološkim jedinicama i<br />
procesima u proizvodnji<br />
Svi upravljački podsustavi imaju zajedničku osnovnu strukturu koja se može jasno<br />
uočiti i na ovom primjeru. Upravljački sustavi imaju slijedeće bitne dijelove:<br />
- mjerni podsustav, sastoji se od mjerne instrumentacije , neposredne (on-line) i<br />
posredne ( off-line )<br />
- upravljačka jedinica , elementi su logičke programibilne jedinice ( PLC ),<br />
regulatori, elektronička računala ( procesna i PC računala ) i/ili čovjek<br />
- izvršni sustav, elementi su izvršne sprave koje omogućuju pretvaranje<br />
upravljačkih veličana, a to su informacije, u promjene ulaznih procesnih<br />
veličina ( ulaznih tokova mase i energije ).<br />
Za opisani primjer možemo promotriti upravljanje brzine rasta mikroorganizama.<br />
Mjernim sustavom određujemo stanje, brzinu rasta na osnovi mjerenja koncentracije tijekom<br />
procesa. Informacija se prenosi u računalo koje na osnovu programa izračunava potreban<br />
pritok supstrata da se podesi brzina rasta prema ulaznoj informaciji. Izvršni element<br />
je regulacijski ventil kojim možemo podešavati pritok supstrata.<br />
145
Ž. Kurtanjek: Automatizacija 2007<br />
OSNOVNI STRUKTURNI OBLICI UPRAVLJANJA<br />
Upravljanje sustava može se razložiti na osnovne oblike upravljanja. Složeni upravljački<br />
sustavi nastaju sintezom tri osnovna oblika upravljanja:<br />
1) programno upravljanje,<br />
2) upravljanje u unaprijednoj vezi,<br />
3) upravljanje u povratnoj vezi.<br />
Osnovni oblici upravljanja su definirani za jednostavan sustav s jednom veličinom stanja<br />
i/ili izlaznom veličinom, a njihovim povezivanjem stvaraju se složene upravljačke strukture<br />
s više ulaznih i izlaznih veličina.<br />
Programno upravljanje prikazano je na slici 3.1.<br />
ulazna procesna<br />
veli~ina veličina<br />
+<br />
X P<br />
+<br />
P R O C E S<br />
upravlja~ka upravljačka veličina veli~ina<br />
U<br />
UPRAVLJA^KI<br />
UPRAVLJAČKI<br />
SUSTAV<br />
ulazna informacijska veličina<br />
ulazna informacijska veli~ina<br />
X I<br />
izlazna veličina veli~ina<br />
Slika 3.1. Shematski prikaz programnog upravljanja.<br />
Iz prikaza na slici 3.1 programnog upravljanja vidljive su osnovne značajke ovog upravljanja.<br />
Upravljački sustav prima isključivo ulaznu informacijsku veličinu iz okoline, a<br />
nema informaciju o stanju ulazne procesne niti veličine stanja procesa ili izlazne veličine.<br />
Poremećaji koji djeluju na proces, bilo da se djeluju iz okoline s ulaznom veličinom ili<br />
nastaju u samom procesu, kao informacija ne dolaze do upravljačkog sustava. Izlazna veličina<br />
upravljačkog sustava nastaje izvođenjem programa koji je upisan u pamtilo upravljačkog<br />
sustava, odatle i naziv ovog načina upravljanja. Upravljački sustav najčešće ima<br />
u pamtilu cijeli niz mogućih upravljačkih programa čije izvođenje se aktivira na osnovi<br />
ulazne informacijske veličine. Upravljački sustav može biti jednostavne izvedbe, kao što<br />
su različiti mehanički " programatori " ili je to suvremena upravljačka jedinica kao što su<br />
PLC ( programmable logic controller), osobna računala (PC ) ili procesna računala. Ovo<br />
je najzastupljeniji način upravljanja u industriji ali se vrlo često mora kombinirati s osta-<br />
Y<br />
146
Ž. Kurtanjek: Automatizacija 2007<br />
lim oblicima upravljanja kako bi se postigla kompenzacija poremećaja. Programno upravljanje<br />
se može samostalno upotrijebiti samo u slučajevima kada na proces ne djeluju<br />
poremećaji iz okoline, odnosno kada je njihov utjecaj zanemariv.<br />
Primjeri:<br />
- programno upravljanje procesa pripreme ambalaže, pakiranja proizvoda<br />
- programno upravljanje priprema sirovina za miješalice ili reaktore prema<br />
recepturama ( program )<br />
- programno upravljanje skladištima sirovina i proizvoda<br />
- programno upravljanje procesima pripreme bioreaktora ( program<br />
predpranja, toplinske sterilizacije, unosa inokuluma itd. )<br />
Unaprijedno upravljanje<br />
Unaprijedno upravljanje zasniva se na mjerenju poremećaja ulazne procesne veličine.<br />
Zadaća upravljačkog sustava je kompenzacija mjerenog poremećaja ulazne procesne veličina.<br />
Na sustav ( slika 3.2.) djeluju tri ulazne veličine, dvije procesne X P1 i X P2 , i ulazna<br />
informacijska veličina X I . Upravljački sustav prima slijedeće dvije informacije: iz<br />
okoline sustava, to je ulazna informacijska veličina XI; i informaciju u obliku mjernog signala,<br />
X P1m , o poremećaju ulazne procesne veličine X P1 .<br />
ulazne<br />
ulazne procesne<br />
procesne<br />
veličine<br />
veli~ine<br />
XP1 X P2<br />
+<br />
mjerni signal X P1m<br />
P R O C E S<br />
+<br />
upravlja~ka upravljačka veličina veli~ina<br />
U<br />
UPRAVLJA^KI<br />
UPRAVLJAČKI<br />
SUSTAV<br />
S U S T A V<br />
izlazna<br />
izlazna veličina<br />
veli~ina<br />
Y<br />
ulazna informacijska<br />
ulazna informacijska<br />
veli~ina<br />
veličina<br />
Slika 3.2. Shematski prikaz unaprijednog upravljanja.<br />
Prva procesna ulazna veličina X P1 djeluje kao poremećaj na proces. Ta veličina mora biti<br />
obavezno mjerljiva ( mjerljiva ulazna procesna veličina ) ali nije nužno upravljiva (nije<br />
manipulativna ). Druga ulazna procesna veličina X P2 nije nužno mjerljiva ali je obavezno<br />
upravljiva (manipulativna ulazna procesna veličina). Izlazna veličina, U, upravljačkog<br />
sustava djeluje na manipulativnu procesnu ulaznu veličinu X P2 . Algoritam upravljanja<br />
X I<br />
147
Ž. Kurtanjek: Automatizacija 2007<br />
zasniva se na predviđanju djelovanja ulaznih veličina, poremećaja XP1 i manipulativne<br />
XP2 na stanje i/ili izlaznu veličinu Y procesa. Predviđanje djelovanja ostvaruje se matematičkim<br />
modelom procesa. Djelovanje upravljačkog sustava nužno mora imati značajno<br />
manju vremensku konstantu od upravljanog procesa kako bi se postigla kompenzacija poremećaja<br />
prije nego li što se značajno odrazi na sam proces.<br />
Ulazna informacijska veličina XI je informacija o željenim promjenama stanja procesa.<br />
Ako je ulazna informacijska veličina konstantna onda se radi o referentnoj vrijednosti izlazne<br />
veličine i tada govorimo o unaprijednoj regulaciji procesa. Kod upravljanja biotehnološkim<br />
procesima ( bioreaktora ), koji su najčešće nestacionarni, ulazna informacijska<br />
veličina je promjenljiva. Za unaprijedno upravljanje potreban je " inverzni model " procesa<br />
kojim je moguće odrediti promjene upravljive ulazne procesne veličine X P2 za zadane<br />
informacije o poremećaju XP1 i ulaznoj informaciji XI.<br />
M<br />
X Y<br />
M -1<br />
Shematski prikaz modela procesa M i inverznog modela procesa M -1 u svrhu upravljanja.<br />
Unaprijednim upravljanjem nije moguće kompenzirati nemjerene poremećaje, kao što su<br />
poremećaji koji nastaju u samom procesu ili poremećaji u nemjerenim ulaznim veličinama.<br />
Također je specifičnost unaprijednog upravljanja izrazita zavisnost kvalitete upravljanja<br />
o pogreškama modela. Pogreške modela se ne mogu kompenzirati i mogu imati za<br />
posljedicu značajne pogreške upravljanja. Nedostaci unaprijednog upravljanja se kompenziraju<br />
u sintezi s upravljanjem u povratnoj vezi.<br />
Značajna primjena unaprijednog upravljanja je u biotehnologiji kod procesa s osjetljivim<br />
ili slabo stabilnim mikroorganizmima ( genetički modificiranim ). Zbog ireverzibilnosti<br />
poremećaja u funkciji mikroorganizmima ne može se dozvoliti upravljanje zasnovano na<br />
mjerenju poremećaja u procesu, već se unaprijednom kompenzacijom mora preduhitriti<br />
svaki poremećaj.<br />
Primjer:<br />
Na slici 3.3 dan je shematski prikaz unaprijedne regulacije pH u bioreaktoru za proizvodnju<br />
mliječne kiseline. Pritoci melase i lužine ( CaCO 3 ) su dvije ulazne procesne veličine.<br />
Budući da se fermentacija provodi s prihranjivanjem, proces nije stacionaran i pritok melase<br />
mora biti promjenljiv. Promjena pritoka melase kao i proizvodnja mikroorganizama<br />
148
Ž. Kurtanjek: Automatizacija 2007<br />
imaju za posljedicu stalnu promjenu pH u reaktoru. Zbog inhibirajućeg djelovanja kiseline<br />
na rast i produktivnost mikroorganizama potrebno je pH regulirati. Unaprijednom regulacijom<br />
moguće je kompenzirati poremećaje prije nego li što se izazove deaktivacija<br />
biomase. Pritok melase je promjenljiva ulazna veličina, odnosno je to ulazni poremećaj<br />
X P1 koji treba mjeriti u svrhu unaprijedne regulacije. Mjerni signal X P1m iz mjerila<br />
protoka je ulazna veličina ( informacija ) za upravljački sustav. Druga ulazna procesna<br />
veličina XP2 koja je upravljiva ( manipulativna ) je pritok lužine. pH u reaktoru je veličina<br />
stanja i ujedno izlazna veličina Y.<br />
mjerenje<br />
protoka<br />
pritok<br />
CaCO<br />
X 3<br />
P2<br />
PC<br />
X P1m<br />
upravlja~ki upravljački sustav<br />
PC ra~unalo računalo s modelom<br />
bilance H<br />
+ s modelom<br />
( pH )<br />
pritok melaseX<br />
( poreme}aj ) P1<br />
(poremećaj)<br />
U<br />
upravlja~ka upravljačka<br />
veli~ina veličina<br />
X I<br />
pHreferentno Slika 3.3. Shematski prikaz unaprijedne regulacije pH.<br />
pH<br />
izlazna<br />
veli~ina veličina Y<br />
Upravljački sustav je PC računalo koje je neposredno ("on-line") povezano s mjernim<br />
uređajem za protok melase i regulaciskim ventilom za podešavanje pritoka lužine. Ulazna<br />
informacijska veličina I za upravljački sustav su podaci koji se unose iz okoline, na primjer<br />
predaje ih operater ili se prenose iz nekog drugog izvora, kao što je zapis ("file" ) u<br />
samom računalu za upravljanje ili iz nekog drugog računala. Ako se proces provodi pri<br />
stalnom pH onda je ulazna informacijaka veličina konstanta jednaka željenoj ili referentnoj<br />
vrijednosti pH. Bitni dio upravljačkog sustava je matematički model bilance H +<br />
(protona) kojim se određuje pH. Modelom se određuje bilanca na osnovi pritoka melase i<br />
lužine i proizvodnje mikroorganizama.<br />
Upravljanje u povratnoj vezi<br />
Upravljanje u povratnoj vezi je najčešći oblik upravljanja u prirodi, društvu i tehnici. Osnova<br />
upravljanja u povratnoj vezi je mjerenje poremećaja stanja procesa i povratno djelovanje<br />
upravljačkog sustava na ulazne procesne veličine. Najjednostavniji prikaz upravljanja<br />
u povratnoj vezi dan je na slici 3.4. Prikazan je proces s jednom ulaznom proces-<br />
149
Ž. Kurtanjek: Automatizacija 2007<br />
nom veličinom XP i jednom veličinom stanja i/ili izlaznom veličinom Y. Ulazna informacijska<br />
veličina djeluje neposredno na upravljački sustav. Poremećaju koji su posljedica<br />
promjena ulaznih veličina ili promjena u samom procesu odražavaju se kao poremećaj<br />
stanja procesa Y. Stanje procesa mora biti mjerljiva veličina tako da se informacija (mjerni<br />
signal) o promjeni stanja prenosi u upravljački sustav.<br />
X<br />
P<br />
+<br />
-<br />
U<br />
P R O C E S<br />
Y<br />
UPRAVLJA^KI<br />
UPRAVLJAČKI<br />
+<br />
SUSTAV<br />
-<br />
X I<br />
Slika 3.4. Shematski prikaz upravljanja u povratnoj vezi.<br />
Upravljački sustav prima istovremeno dvije informacije, ulaznu informaciju XI i informaciju<br />
o stanju procesa Y. Ulazna veličina je razlika tih dviju informacija, dakle razlika<br />
između izmjerenog stanja procesa i ulazne informacije iz okoline.<br />
U<br />
q melase<br />
q vode<br />
X<br />
P<br />
X I = T R<br />
P C<br />
Pt 100<br />
Y = T<br />
Slika 3.5. Primjer regulacije temperature u biorekatoru.<br />
Izlazna veličina iz upravljačkog sustava je upravljačka veličina U. Upravljačka veličina<br />
mijenja stanje ulazne upravljive veličine X P , koja mora biti podesiva odnosno manipulativna<br />
procesna veličina.<br />
Najčešće je djelovanje upravljačke veličine takovo da su promjene ulaznih veličina suprotnog<br />
predznaka od odstupanja izlazne veličine od ulazne informacije (referentne vrije-<br />
150
Ž. Kurtanjek: Automatizacija 2007<br />
dnosti). Zbog suprotnog djelovanja se upotrebljava naziv negativna povratna veza. Na<br />
primjer, potrebno je smanjiti pritok melase ako je razina u reaktoru iznad referentne vrijednosti,<br />
ili potrebno je povećati pritok energije (topline) ako je temperatura ispod referentne.<br />
Za procese koji imaju negativni statički koeficijent pojačanja se umjesto negativne<br />
povratne veze mora upotrebiti pozitivna povratna veza kako bi se osigurala kompenzacija<br />
poremećaja i stabilnost upravljanja.<br />
Na proces istovremeno djeluje promjena iz okoline i promjena na osnovi povratne informacije<br />
iz procesa, dakle postoji povratni zatvoreni krug informacije.<br />
Bitna osobina upravljanja u povratnoj vezi je jednostavnost algoritma upravljanja. Upravljačka<br />
veličina se često dobije množenjem razlike ulaznih informacija s konstantom ( pojačanje<br />
). Nezavisnost algoritma upravljanja o modelu procesa omogućuje upravljanje<br />
složenim procesima za koje ne raspolažemo s matematičkim modelima, bilo da su procesi<br />
suviše složeni ili su čak nepoznati.<br />
Primjer: regulacija temperature u bioreaktoru<br />
Regulacija temperature u bioreaktoru je obavezna zbog velike osjetljivosti procesa rasta<br />
mikroorganizama i proizvodnje metabolita o temperaturi. Regulacija se provodi u povratnoj<br />
vezi ( slika 3.5 ). Ulazna upravljiva veličina X P je protok vode kroz plašt bioreaktora<br />
( izmjenjivač topline ). Stanje procesa Y ( izlazna veličina ) je temperatura T u bioreaktoru<br />
koja se mjeri standardnim termometrom Pt 100 . Upravljački sustav je računalo ( PC ).<br />
Ulazna informacijska veličina X I je podatak o temperaturi u određenom trenutku koji su<br />
unosi u računalo iz okoline ili se čita iz zapisa ("file"). Povratni krug je ovdje ostvaren<br />
tako da se informacija o temperaturi u reaktoru prenosi računalom ponovo na ulazni pritok<br />
u reaktor.<br />
Mehanizam regulacije možemo objasniti na slijedeći način. Na reaktor djeluje poremećaj<br />
koji ima za posljedicu promjenu temperature. Poremećaj može, na primjer, biti prouzročen<br />
na slijedeće načine: zbog promjene u pritoku melase, promjene u brzini rasta mikroorganizama,<br />
posljedica promjene protoka ili temperature u izmjenjivaču topline, promjene<br />
temperature okoline, ili kombinacijom svih promjena. Djelovanje poremećaja rezultira<br />
promjenom temperature u reaktoru, temperatura se mjeri i informacija se uspoređuje s<br />
ulaznom informacijom iz okoline. Ako je poremećaj izazvao porast temperature u odnosu<br />
na ulaznu informaciju, regulator (koji je u najjednostavnijem slučaju pojačalo) daje upravljački<br />
signal koje pojačava razliku izmjerene temperature i ulazne informacije. Upravljačka<br />
veličina je informacija koja se pretvara u fizičku akciju tako da se djeluje na regulacijski<br />
ventil kojim se mijenja protok vode u izmjenjivaču. Kada je pozitivna razlika<br />
na ulazu u regulator smanjuje se protok a kada je razlika negativna protok se povećava.<br />
Suprotan predznak promjena je posljedica negativne povratne veze.<br />
Najznačajnije značajke upravljanja u povratnoj vezi su:<br />
151
Ž. Kurtanjek: Automatizacija 2007<br />
Bez obzira na izvor poremećaja upravljanjem u povratnoj vezi može se kompenzirati njihovo<br />
djelovanje.<br />
Algoritam upravljanja je vrlo jednostavan i ne zahtjeva model procesa.<br />
Povratnom vezom se upravlja većinom stanja u bioreaktoru, kao što su na primjer: koncentracija<br />
otopljenog kisika, pH, razina, pjena, koncentracija hranjivih tvari ( supstrata),<br />
itd.<br />
Također su brojni primjeri u prehrambenoj industriji, kao što je regulacija raspodjele<br />
temperature u pećnicama i hladnjacima, ili regulacija vlažnosti zraka u skladištima ili<br />
procesni komorama., itd.<br />
Za složene više varijabilne i nelinearne sustave potrebno je primijeniti kompleksni upravljački<br />
sustav koji nastaje sintezom navedena tri osnovna oblika upravljanja.<br />
152
Ž. Kurtanjek: Automatizacija 2007<br />
POVEZIVANJE RAČUNALA U UPRAVLJAČKI SUSTAV<br />
Upotreba računala za upravljanje je najvažnija značajka suvremenih upravljačkih<br />
sustava u procesnoj industriji. Računala se povezuju neposredno na proces (on line) i ujedno<br />
se računala međusobno povezuju u mrežu računala. U početku primjene računala za<br />
upravljanje, od 1960, kada su računala bila vrlo skupa, upravljanje se je zasnovalo na<br />
upotrebi jednog velikog središnjeg ( centralnog ) računala. Razvojem tehnologije poluvodičkih<br />
elemenata ( čipova) cijena računala postaje sve manje značajna i istovremeno<br />
snaga malih računala ( npr. PC ) omogućuje primjenu velikog broja računala za upravljanje<br />
proizvodnje u nekom pogonu ili cijeloj tvornici.<br />
PROCES<br />
mjerni<br />
sustav<br />
izvršni<br />
sustav<br />
Shematski prikaz osnovnih dijelova digitalnog (računalnog) sustava za upravljanje<br />
Osnovne načine povezivanja možemo prikazati na jednostavnom primjeru procesa s jednom<br />
ulaznom i izlaznom veličinom. Računalo se može povezati<br />
X<br />
P +<br />
P R O C E S<br />
Y<br />
-<br />
U<br />
prilagodba<br />
signala<br />
prilagodba<br />
signala<br />
R E G U L A T O R<br />
Slika 4.1. Kaskadno povezivanje računala i regulacijskog kruga.<br />
procesom na dva načina: 1) kaskadno ; ili 2) direktno (DDC digital direct control).<br />
1) kaskadno povezivanje računala i procesa<br />
P C<br />
A/D<br />
pretvornik<br />
D/A<br />
pretvornik<br />
+<br />
-<br />
X I<br />
RAČUNALO<br />
UPRAVLJAČKI<br />
SUSTAV<br />
153
Ž. Kurtanjek: Automatizacija 2007<br />
Na slici 4.1 prikazan je kaskadni spoj računala i procesa. Kod ovakvog povezivanja proces<br />
je neposredno upravljan s regulatorom u povratnoj vezi, a posredno s računalom. Računalo<br />
je povezano na ulaz regulatora i predaje regulatoru ulaznu informacijsku veličinu<br />
X I . Kod svakog razmatranja upravljanja u proizvodnom pogonu potrebno je analizirati<br />
ulogu čovjeka, odnosno inženjera koji upravlja posredstvom računala procesom. Na slici<br />
4.1. je prikazano da čovjek neposredno komunicira putem računala s regulacijskim krugom,<br />
na primjer predajom podataka za promjenu ulazne informacijske veličine X I , ili putem<br />
računala mijenja parametre regulatora. Kaskadni način upravljanja ima svoje prednosti<br />
kada se radi o automatizaciji postojećih ( starijih )postrojenja koja nisu u početku<br />
bili projektirani za upravljanje računalom. Inženjeri u pogonu imaju mogućnost primjene<br />
klasičnog znanja iz regulacije kao i svoga radnog iskustva i postepeno se privikavati na<br />
upotrebu suvremenih računala namijenjenih upravljanju. Druga važna pogodnost kaskadnog<br />
povezivanja je u povećanoj sigurnosti rada pogona u situacijama kada postoje problemi<br />
u radu računala ( na primjer kod izmjene programske podrške, software, ili prekida<br />
rada računala zbog kvara ).<br />
U suvremenim industrijskim pogonima primjenjuje se direktno digitalno upravljanje (<br />
DDC ) kod kojega više nema klasičnih regulacijskih krugova i računalo je neposredno<br />
povezano s procesom.<br />
X P +<br />
-<br />
D/A<br />
X I<br />
P R O C E S<br />
P C<br />
U Y m<br />
Slika 4.2 Shematski prikaz direktnog digitalnog upravljanja ( DDC) regulacijskog kruga.<br />
Na slici 4.2 prikazan je jednostavan regulacijski DDC krug. U krugu nema klasičnog regulatora<br />
i računalo je direktno vezano na proces, odnosno na mjerni uređaj i izvršnu spravu.<br />
Komunikacija između digitalnog računala i analognog procesa omogućena je primjenom<br />
analogno digitalnih pretvornika ( D/A i A/D ). Algoritam upravljanja je programska<br />
podrška (software) upisan u pamtilo računala. Velika prednost DDC povezivanja je u<br />
potpunoj fleksibilnosti upravljanja. Kod klasičnih regulacijskih krugova je svaka promjena<br />
u komponentama skupa i zahtjeva prekid rada pogona, a ovdje su sve upravljačke karakteristike<br />
zapravo naredbe u kompjutorskom programu i lagano se mijenjaju i usavršavaju.<br />
Povećanje u sigurnosti u radu se postiže upotrebom paralelnog ( rezervnog ) računa-<br />
Y<br />
A/D<br />
154
Ž. Kurtanjek: Automatizacija 2007<br />
la koje se automatski uključuje u slučaju prekida rada. Problemi u vezi pouzdanosti rada<br />
računala su također potpuno riješeni upotrebom posebne klase PC računala namijenjenih<br />
za rad u uvjetima pogona. Ovakva industrijska PC računala imaju potpuno pouzdane<br />
komponente i vlastite rezervne izvore energije.<br />
Svaki industrijski pogon se sastoji od velikog broja procesnih jedinica koje se mogu upravljati<br />
računalom, tako da se vrlo često veliki broj računala u industrijskom pogonu međusobno<br />
povezuje u lokalnu računalnu mrežu ( LAN - local area network ).<br />
Slika 4.3a Prikaz "bus" strukture lokalne računalne mreže ( LAN ).<br />
Slika 4.3 Prikaz "zvijezde" strukture lokalne računalne mreže ( LAN ).<br />
Na slici 4.3 prikazano je povezivanje računala u serijski spoj kod kojega se komunikacija<br />
provodi s jednom sabirnicom (magistrala ili " bus "). Svako od računala radi nezavisno<br />
od ostalih, a jedno računalo (" file server ", -FS) poslužuje cijelu mrežu i omogućava<br />
komunikaciju između korisnika. Računala spojena u mrežu su najčešće standardna računala<br />
klase PC ili Apple/Macintosh. Korisnici mogu koristiti zajedničke zapise , " files" ,<br />
155
Ž. Kurtanjek: Automatizacija 2007<br />
istovremeno raditi na zajedničkom projektu, ili samo razmjenjivati informacije. Ovakve<br />
lokalne mreže su uobičajene za automatizaciju procesa gdje ne postoji izrazita proizvodna<br />
struktura (na primjer automatizacija ureda, biblioteka, laboratorija, projektnih organizacija<br />
itd.).<br />
Slika povezivanja lokalnih mreža u industriji i Interneta.<br />
Shematski prikaz komunikacijskih tokova u računalnoj mreži za upravljanje procesa<br />
156
Ž. Kurtanjek: Automatizacija 2007<br />
U industrijskim pogonima je potrebno razviti višerazinsku strukturu računarske mreže,<br />
kao što je shematski prikazano na slici 4.4<br />
razina velikog ra~unala<br />
MF ( main frame )<br />
razina radnih stanica<br />
WS<br />
( working station )<br />
razina PC<br />
ra~unala računala<br />
razina mjerne<br />
instrumentacije i<br />
izvršnih<br />
izvr{nih sprava<br />
razina<br />
procesa<br />
PC<br />
MS IS<br />
WS WS WS<br />
PC<br />
MS IS<br />
MF<br />
PC<br />
MS IS<br />
PC<br />
MS IS<br />
PROCES PROCES PROCES PROCES<br />
1 2 3 4<br />
Slika 4.4 Shematski prikaz više razinske strukture povezivanja računala u<br />
proizvodnji upravljanoj računalima (CIM- computer integrated manufacture ).<br />
Na slici su naznačene slijedeće razine u CIM strukturi:<br />
1)procesna razina<br />
2)razina mjernih i izvršnih sustava<br />
3)razina PC računala za neposredno upravljanje pojedinim procesnim jedinicama<br />
4)razina računala u klasi radnih stanica ( " working stations ", WS )<br />
5)razina glavnog računala ( " main frame ", - MF )<br />
Procesne jedinice i računala su povezana u cjelinu koja ima organiziranu strukturu<br />
u više razina. Za upravljanje se koristi veći broj računala raspodijeljenih u proizvodnom<br />
pogonu ili tvornici. Upravljanje proizvodnjom gdje su računala raspodijeljena i namijenjena<br />
upravljanju zasebnim procesnim jedinicama naziva se raspodijeljenim računalnim<br />
upravljanjem ( " distributed computer control ", DCC )<br />
Osnovnu razinu čine zasebne procesne jedinice koje su neposredno ("on line") upravljane.<br />
Kao primjer može se opisati razina procesnih jedinica u nekoj prehrambenoj industriji.<br />
Prva procesna jedinca su spremnici u kojima se skladišti sirovina, zatim slijede<br />
miješalice za pripremu smjesa, transport smjesa do punilica na proizvodnoj traci, proces<br />
toplinske obrade ( na primjer kuhanje ili pečenje), ambalažiranje proizvoda i transport do<br />
skladišta gotovih proizvoda. Svaka procesna jedinica povezana je s mjernim i izvršnim<br />
sustavom s zasebnim računalom za upravljanje. Primjer računalne podrške: SAP u tvrtkama<br />
PLIVA i PODRAVKA<br />
Mjernim sustavima se mjere procesne veličine stanja, kao što su mase (količine )<br />
ili protoci pojedinih komponenata, temperatura, tlak , pH i sve ostale važne procesne ve-<br />
157
Ž. Kurtanjek: Automatizacija 2007<br />
ličine. Izvršni sustav čine regulacijski ventili za upravljane prijenosa mase i energije, regulacijske<br />
sklopke, pumpe itd.<br />
Na prvoj računalnoj razini nalaze se računala klase PC za neposredno upravljanje<br />
pojedenim procesima. Najčešće takova računala imaju zadaće programnog upravljanja<br />
slijedom operacija i regulaciju pojedinih procesnih veličina. Računala su povezana horizontalno<br />
tako da je omogućena sinkronizacija rada procesnih jedinica.<br />
Informacije s razine neposredne proizvodnje prenose se na višu razinu gdje se nalaze<br />
računala u klasi radnih stanica (WS). Na ovoj razini se obavljaju složeni zadaci upravljanja<br />
kao što je projektiranje procesne opreme, "on line" i "off line" optimiranje proizvodnih<br />
planova i receptura za pojedine proizvode. Takova računala podržavaju distribuirane<br />
baze podataka o tekućoj proizvodnji kao i tehničku dokumentaciju o procesnim jedinicama.<br />
Računala imaju veću moć procesiranja, rade s više korisnika u isto vrijeme<br />
(multi user programming ) i/ili zadataka ("multi tasking"). Radne stanice su međusobno<br />
povezane u horizontalnu mrežu računala, ali i postoji povezanost prema nižoj i višoj razini.<br />
Na najvišoj razini se nalazi središnje ili glavno računalo ("main frame computer<br />
MF") koje ima najveću procesnu moć obrade informacija. Takova računala najčešće imaju<br />
zadaću obavljanja najzahtjevnijih zadataka kao što su dugoročno optimiranja proizvodnje<br />
za cjelokupno poduzeće i obavljanje financijskog poslovanja.<br />
Strukturiranjem računala postiže se velika fleksibilnost tako da se lagano sustav<br />
računala širi i/ili zamjenjuje novim računalima i procesnim jedinicama. Ujedno je postignuta<br />
velika stabilnost u radu cjelokupnog sustava.<br />
Primjer korisničkog programskog sučelja za upravljanje procesa<br />
158
Ž. Kurtanjek: Automatizacija 2007<br />
Primjer objektnog pristupa sučelju za nadzor procesa<br />
Primjer sučelja za upravljanje bioreaktorom u Tvornici kvasca "Podravka"<br />
159