

Feszültséginverteres aszinkron motoros hajtás - Villamos Energetika ...
Feszültséginverteres aszinkron motoros hajtás - Villamos Energetika ...
Feszültséginverteres aszinkron motoros hajtás - Villamos Energetika ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
BUDAPESTI MŰSZAKI ÉS<br />
GAZDASÁGTUDOMÁNYI EGYETEM<br />
VILLAMOSMÉRNÖKI ÉS INFORMATIKAI KAR<br />
VILLAMOS ENERGETIKA TANSZÉK<br />
<strong>Villamos</strong> gépek és <strong>hajtás</strong>ok csoport<br />
IMPULZUSSZÉLESSÉG-MODULÁLT FESZÜLTSÉGINVERTERRŐL TÁPLÁLT<br />
ASZINKRON MOTOROS HAJTÁS VIZSGÁLATA<br />
Laboratóriumi mérési útmutató<br />
Összeállította: Erdélyi István, Kádár István, Veszprémi Károly<br />
1. A méréssel kapcsolatos tananyag:<br />
Halász S.: <strong>Villamos</strong> <strong>hajtás</strong>ok. Egyetemi tankönyv. ROTEL Kft., Budapest, 1993. 263-277 o.<br />
2. A mérés célja:<br />
Egy-chipes mikrokontrollerre épülő információ-elektronikai elemek és teljesítmény<br />
IGBT-k felhasználásával megépített frekvenciaváltó vizsgálata, <strong>aszinkron</strong> <strong>motoros</strong> <strong>hajtás</strong><br />
jellegörbéinek mérése.<br />
3x400 V<br />
R<br />
S<br />
T<br />
INVERTER<br />
C NM TA<br />
ih ui ,, ψ,<br />
m<br />
Oszciloszkóp<br />
1<br />
V<br />
TD<br />
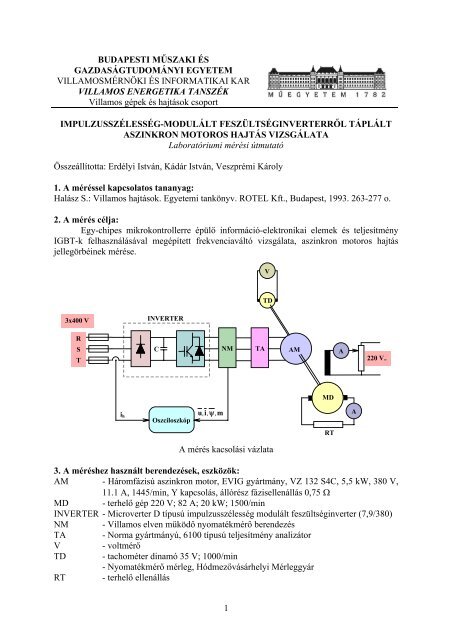
A mérés kacsolási vázlata<br />
AM<br />
MD<br />
RT<br />
A<br />
A<br />
220 V=<br />
3. A méréshez használt berendezések, eszközök:<br />
AM - Háromfázisú <strong>aszinkron</strong> motor, EVIG gyártmány, VZ 132 S4C, 5,5 kW, 380 V,<br />
11.1 A, 1445/min, Y kapcsolás, állórész fázisellenállás 0,75 Ω<br />
MD - terhelő gép 220 V; 82 A; 20 kW; 1500/min<br />
INVERTER - Microverter D típusú impulzusszélesség modulált feszültséginverter (7,9/380)<br />
NM - <strong>Villamos</strong> elven működő nyomatékmérő berendezés<br />
TA - Norma gyártmányú, 6100 típusú teljesítmény analizátor<br />
V - voltmérő<br />
TD - tachométer dinamó 35 V; 1000/min<br />
- Nyomatékmérő mérleg, Hódmezővásárhelyi Mérleggyár<br />
RT - terhelő ellenállás
4. Mérési feladatok<br />
1. Az <strong>aszinkron</strong> motor M(n) jelleggörbéjének felvétele kompenzáció nélkül.<br />
2. A szlipkompenzáció számítása.<br />
3. A szlipkompenzáció hatásának vizsgálata az M(n) jelleggörbére.<br />
4. A törésponti frekvencia hatásának vizsgálata az M(n) jelleggörbére.<br />
5. A kisfrekvenciás feszültségemelés (boost) hatásának vizsgálata az M(n) jelleggörbére.<br />
6. Az állórész fluxus vizsgálata üresjárásban.<br />
7. Időfüggvények és Park-vektorok megfigyelése oszcilloszkópon, a szinuszos tápláláshoz<br />
képesti eltérés vizsgálata.<br />
8. A motor feszültség és áram felharmonikus tartalmának vizsgálata.<br />
5. Az inverter rövid áttekintése (részletes leírását a Melléklet tartalmazza).<br />
Az inverter háromfázisú betáplálást igényel; diódás híddal egyenirányítjuk a hálózati<br />
feszültséget. Az inverter oldal kapcsolóelemei IGBT tranzisztorok, ami nagy kapcsolási frekvencia<br />
elérését teszi lehetővé. Ez utóbbi a motor igénybevétele szempontjából (járulékos felharmonikus<br />
veszteség) előnyös, de méréstechnikai szempontból az igen gyors kapcsolások<br />
komoly problémákat okoznak. Az egyenáramú kör csak kondenzátort tartalmaz, a szűrési<br />
célból gyakran alkalmazott fojtótekercs nincs beépítve, ez a hálózati (felharmonikus) visszahatás<br />
miatt hátrányos.<br />
Fékezésre nincs mód, ezért a terhelés nélküli gyors lassítások kerülendők, mert a <strong>hajtás</strong><br />
az egyenköri feszültség megemelkedése miatt hibajelzéssel leállhat.<br />
Az egy-chipes mikrokontrollerre épülő irányítóegység teljesen digitális. A programot<br />
és a paramétereket EEPROM memóriában tárolják, ezáltal lehetséges a paramétereknek bármikor<br />
történő módosítása és elmentése.<br />
A tápfeszültség (3x400 V) bekapcsolása után a készülék egy inicializáló programrészt<br />
futtat le, melynek során a kijelzőn a minimális (egyúttal aktuális) frekvencia jelenik meg.<br />
Ezen programrész lefutása után, ha közben nem nyomjuk meg a billentyűket, a "ready" (rdY)<br />
felirat lesz látható.<br />
Az inverteren 3 kompenzációs paramétert lehet beállítani:<br />
K1) szlipkompenzációt,<br />
K2) kisfrekvenciás feszültségemelést,<br />
K3) törésponti frekvencia módosítást.<br />
Pr7<br />
w0<br />
w<br />
wn<br />
2<br />
Mn<br />
A szlipkompenzáció értelmezése és beállítása<br />
M
K1) Szlipkompenzáció<br />
A terhelőárammal arányosan kompenzálja az <strong>aszinkron</strong> motor mechanikai jelleggörbéjének<br />
esését. A névleges nyomatékhoz (áramhoz), névleges fordulatszámhoz tartozó munkapontban<br />
kell beállítani az inverter frekvencia emelését.<br />
K2) Kisfrekvenciás feszültségemelés<br />
Az <strong>aszinkron</strong> motor állórész ellenállásán alacsony frekvencián a kis tápfeszültséghez<br />
viszonyítva jelentős a feszültségesés, ami a fluxus és a nyomaték csökkenését okozza. Ennek<br />
kompenzálására az U/f = állandó értékhez képest az inverter a frekvenciától (és esetleg a terheléstől<br />
is) függő mértékben emelt feszültséget ad (IR kompenzáció). Hatása 3 Hz-től a törésponti<br />
frekvencia feléig érvényesül.<br />
Pr6<br />
U<br />
100 %<br />
50 %<br />
25,5 %<br />
3 Hz<br />
ft/2 ft fMAX<br />
A kisfrekvenciás feszültségemelés értelmezése és beállítási tartománya<br />
K3) A törésponti frekvencia módosítása<br />
Az inverter a névleges feszültséget az ft törésponti frekvencián adja ki. Adott frekvencia<br />
mellett a kapocsfeszültséget (és ezzel a fluxust is) a törésponti frekvencia módosításával<br />
változtathatjuk.<br />
U<br />
Un<br />
fHATÁR/16<br />
3<br />
ft<br />
fHATÁR<br />
A törésponti frekvencia értelmezése és beállítási tartománya<br />
Prc<br />
f<br />
f
Alapjel adásra három lehetőség van:<br />
A1) az előlapon elhelyezett billentyűzet segítségével,<br />
A2) analóg vonalon potencióméterről,<br />
A3) soros vonalon keresztül külső számítógépről.<br />
A1) Kezelés a saját billentyűzetről a Mellékletben részletesen leírtak szerint.<br />
Ha irányváltást akarunk, akkor a ∨ gomb megnyomásával lemegyünk a minimális<br />
frekvenciáig. Miután ezt elértük, ismét nyomjuk meg kétszer a ∨ gombot. Ezután a ∧ gomb<br />
hatására az ellentétes forgásirányba forog a motor.<br />
A2) Analóg vezérlés<br />
A csatlakoztatott analóg kezelő szervekkel a vezérlés egyszerűbb, mint billentyűzet segítségével.<br />
Ehhez b9 = 1 beállítás szükséges.<br />
Kezelőszervek:<br />
- STOP kapcsoló - feloldása engedélyezi a <strong>hajtás</strong> működését, ezután a <strong>hajtás</strong> felfut a<br />
potenciométeren beállított fordulatszámra.<br />
- az alapjel potenciométer maximuma a Pr1-gyel beállított fmax maximális frekvenciának<br />
felel meg.<br />
- +/- forgásirány váltás<br />
- TÁV/KÉZI - KÉZI-ben érvényesül az alapjel potenciométer, TÁV állásban a soros<br />
vonalon vár paramétereket.<br />
- HIBA - visszajelzés és nyugtázás.<br />
- f analóg kimenet: 0 ...10 V - 0 ... fmax<br />
- I analóg kimenet: 0 ...10 V - 0 ...150% In<br />
A3) A soros vonalon keresztül történő távirányítás jelenleg nem működik.<br />
6. A nyomatékmérő készülék<br />
A műszer alkalmas a feszültség és áram mérése alapján u, i, ψ Park-vektorok előállítására,<br />
belőlük P, Q, M számítására. A ψ és M pontos méréséhez a vizsgált motor pólusszámát<br />
és állórészének fázisellenállását be kell állítani. A digitális kijelző a feszültség, az áram<br />
és a fluxus fázis effektív értékét mutatja.<br />
7. A mérési feladatok elvégzése<br />
7.1. Az <strong>aszinkron</strong> motor M(n) jelleggörbéjének felvétele kompenzáció nélkül<br />
Vegyük fel az inverterről táplált <strong>aszinkron</strong> motor M(n) jelleggörbéjét, nulla szlipkompenzáció,<br />
ft=50 Hz-es törésponti frekvencia, fl=30 Hz és 50 Hz tápfrekvencia beállítása mellett.<br />
(A mérleg mkp egységre van skálázva, 1 kp az MKS mértékrendszerben 1 kg tömeg súlya a<br />
gravitációs térben, közelítőleg 1 kp = 9,81 N.)<br />
7.2. A szlipkompenzáció számítása<br />
A motor névleges adataiból számítsuk ki a szlipkompenzáció közelítő értékét, a kapott eredményt<br />
ellenőrizzük az előző mérés alapján és állítsuk be az inverteren (Pr7).<br />
7.3. A szlipkompenzáció hatásának vizsgálata az M(n) jelleggörbére<br />
A beállított szlipkompenzációval vegyük fel a motor M(n) jelleggörbéjét fl=30 Hz és 50 Hz<br />
tápfrekvencia mellett.<br />
4
7.4. A törésponti frekvencia hatásának vizsgálata az M(n) jelleggörbére<br />
Vegyük fel a motor M(n) jelleggörbéjét ft=75 Hz és 100 Hz törésponti frekvenciánál (üzem<br />
közben Prc nem állítható!), fl=30 Hz és 50 Hz tápfrekvencia mellett.<br />
7.5. A kisfrekvenciás feszültségemelés (boost) hatásának vizsgálata az M(n) jelleggörbére<br />
Vegyük fel a motor M(n) jelleggörbéjét a kisfrekvenciás feszültségemelés (boost) ∆U = 0 %<br />
és 5,1 % beállításával (Pr7, b3=1 - statikus), ft=60 Hz törésponti frekvenciánál, fl=20 Hz és<br />
40 Hz tápfrekvencia mellett.<br />
7.6. Az állórész fluxus vizsgálata üresjárásban<br />
Vizsgáljuk üresjárásban az állórész fluxus állandóságát, vegyük fel a Ψ1(fl) és U1(fl) függvényeket<br />
ft=50 Hz törésponti frekvencia valamint ∆U= 0 % és 5 % kisfrekvenciás feszültségemelés<br />
beállításával (statikus), az fl=0-50 Hz tápfrekvencia tartományban. A fluxus értékét a<br />
nyomatékmérő készülékről olvashatjuk le.<br />
7.7. Időfüggvények és Park-vektorok megfigyelése oszcilloszkópon, a szinuszos tápláláshoz<br />
képesti eltérés vizsgálata<br />
Figyeljük meg oszcilloszkópon a feszültség, az áram, a fluxus és a nyomaték (m) időfüggvényét<br />
valamint az u, i és Ψ Park-vektorokat, vizsgáljuk a szinuszos tápláláshoz képesti eltérést.<br />
7.8. A motor feszültség és áram felharmonikus tartalmának vizsgálata<br />
Figyeljük meg a motor áramának és feszültségének frekvencia spektrumát (felharmonikus<br />
tartalmát) a teljesítmény analizáló képernyőjén fk= 2,9 kHz és 5.9 kHz kapcsolási frekvenciánál,<br />
fl=30 Hz és 50 Hz tápfrekvencia mellett.<br />
Vizsgálandó felharmonikusok: m ± 2, m ± 4 ( m fk<br />
= ).<br />
f<br />
8. Ellenőrző kérdések<br />
2005. október<br />
- Állandó frekvenciájú szinuszos táplálásnál, hogyan változik az <strong>aszinkron</strong> motor<br />
billenőnyomatéka a tápfeszültség változás hatására?<br />
- Inverteres táplálásnál miért alkalmaznak feszültségnövelést alacsony frekvencián?<br />
Mihez képest emelik a feszültséget?<br />
- A törésponti frekvencia megválasztása hogyan hat a névleges frekvencián kialakuló<br />
fluxusra?<br />
- Hogyan változik a fluxus a frekvencia függvényében a törésponti frekvencia alatt és<br />
felett?<br />
5<br />
1
Melléklet<br />
Microverter D digitális frekvenciaváltó háromfázisú <strong>hajtás</strong>ok szabályozására<br />
1. Bevezetés<br />
A frekvenciaváltó szabványos és nagy fordulatszámú <strong>aszinkron</strong> motorok folyamatos, kis<br />
veszteségű fordulatszám szabályozására szolgál.<br />
Diódás híddal egyenirányított konstans közbenső köri egyenfeszültségből szinuszt közelítő<br />
impulzusszélesség modulációval változtatható feszültségű és frekvenciájú háromfázisú váltakozó<br />
áramú rendszert hoz létre.<br />
Az általa táplált <strong>aszinkron</strong> motorral olyan szabályozási dinamikát lehet elérni, amely egyenértékű<br />
az egyenáramú <strong>hajtás</strong>okéval.<br />
A nagy kapcsolási frekvencia biztosítja a motoráram alacsony felharmonikus tartalmát és<br />
ezáltal a motor alacsony zaját és veszteségét, továbbá egyenletes járását még alacsony fordulatszám<br />
tartományban is.<br />
A frekvenciaváltó különböző funkcióit mikroprocesszor látja el.<br />
A berendezés integrált kezelőegységgel rendelkezik, amely három nyomógombból és egy<br />
alfanumerikus kijelzőből áll. Ezekkel lehet beállítani a <strong>hajtás</strong> paramétereit, így az<br />
üzembehelyezés rendkívül leegyszerűsödik, nincs szükség mérőműszerekre.<br />
1.1. A legfontosabb jellemzők:<br />
• Alkalmas szabványos háromfázisú <strong>aszinkron</strong> motorok táplálására<br />
• A váltóirányítóban alkalmazott IGBT-k nagy kapcsolási frekvenciájú impulzus-átalakítást<br />
tesznek lehetővé<br />
• A beállítható maximális kapcsolási frekvencia 11,7 kHz<br />
• Széles kimeneti frekvenciatartomány (0-480 Hz)<br />
• Nagy bemeneti feszültségtartomány<br />
• Üresjárás-, rövidzárás-, földzárlatbiztos kimenet<br />
• Kompakt kialakítás<br />
• A bemeneti cos ϕ megközelítőleg 1<br />
• A készülék digitális jeladó alkalmazása esetén alkalmas fordulatszám szabályozásra<br />
• Hatásos áramerősség-függő szlipkompenzáció<br />
• A fékezésnek két módja között lehet választani:<br />
- egyenáramú fékezés, vagy<br />
- fékezés állítható meredekségű fordulatszám-alapjel csökkentéssel<br />
A motorfeszültség terheléstől függő növelése az alsó- (automatikus növelés) és a felső-<br />
(kivéve az "economy" = takarékos üzemmódot) frekvenciatartományban.<br />
• A paramétereket üzem közben is lehet állítani<br />
• Frekvencia-, fordulatszám- vagy nyomaték alapjel megadás lehetősége<br />
• Hibás vagy hiányzó alapjel esetében a rendszer lekapcsol<br />
• A kijelzőn megjeleníthető a frekvencia vagy a terhelőáram aktuális értéke<br />
Az inverter adattáblája<br />
M-1
Az inverter működési és áramköri vázlata<br />
M-2
2. Paraméterezés<br />
Ellenőrzés: A beállított értékek mind üzemelő, mind leállított <strong>hajtás</strong>nál ellenőrizhetők.<br />
Módosítás: Prc kivételével valamennyi Pr.. paramétert üzem közben is meg lehet változtatni,<br />
a választókapcsolók és a Prc paraméter módosításához a <strong>hajtás</strong>t le kell tiltani.<br />
Az inverter kezelőpultja<br />
2.1. A paraméterek ellenőrzése:<br />
a) Nyomjuk meg egyszer a MÓD gombot; a kijelzőn váltakozva jelenik meg az aktuális<br />
paraméter azonosító jele és beállított értéke.<br />
b) A ∨ vagy a ∧ gombbal választhatjuk ki a kívánt paramétert illetve választókapcsolót.<br />
2.2. A paraméterek módosítása:<br />
a) Nyomjuk meg egyszer a MÓD gombot, és a ∨ vagy a ∧ gombokkal válasszuk ki a<br />
kívánt paramétert illetve választókapcsolót.<br />
b) Nyomjuk meg másodszor is a MÓD gombot; a kijelző az aktuális paraméter beállított<br />
értékét mutatja.<br />
c) A ∨ vagy a ∧ gombbal állítsuk be a kívánt értéket.<br />
Beavatkozás nélkül 8 másodperc után a rendszer kilép a MÓD üzemből, a kijelző visszaáll<br />
frekvencia- vagy terheléskijelzésre (b8-nak megfelelően).<br />
A paraméterek és választókapcsolók követési sorrendje<br />
M-3
2.3. A paraméterek leírása<br />
Pr0: Minimális frekvencia [Hz] (fMIN)<br />
- Kimeneti frekvencia minimális alapjelnél<br />
beállítási tartománya: 0 – fMAX (fMAX a Pr1-el beállított maximális frekvencia értéke)<br />
gyári alapérték: 0 Hz<br />
Pr1: Maximális frekvencia [Hz] (fMAX)<br />
- Kimeneti frekvencia maximális alapjelnél<br />
beállítási tartománya: fMIN – fHATÁR (fMIN a Pr0-al, fHATÁR a b14-el beállított érték)<br />
gyári alapérték: 50 Hz<br />
Értékét ne növeljük a 60 Hz fölé, mert az egyenáramú terhelőgépet nem szabad az ehhez<br />
tartozó fordulatszám fölé gyorsítani!<br />
Pr4: Maximális áramerősség [a készülék névleges áramának %-ban]<br />
- A motorra 30 s-ig megengedett terhelőáram<br />
beállítási tartománya: 0 – 150 %<br />
gyári alapérték: 150 %<br />
Túllépése a tizedespont villogását eredményezi a kijelzőn. Túl hosszú ideig tartó túlterhelés<br />
lekapcsolást idéz elő és a kijelzőn "I⋅t" üzenet jelenik meg.<br />
Pr5: Tartós áramerősség [a készülék névleges áramának %-ban]<br />
- A motorra megengedett tartós üzemi áram.<br />
beállítási tartománya: 10 – 105 %<br />
gyári alapérték: 100 %<br />
Túllépése a tizedespont villogását eredményezi a kijelzőn. Túl hosszú ideig tartó túlterhelés<br />
lekapcsolást idéz elő és a kijelzőn "I⋅t" üzenet jelenik meg.<br />
A motor névleges áramának megfelelő értékre kell állítani.<br />
Pr6: Kisfrekvenciás feszültségemelés (Boost) [a névleges feszültség %-ban]<br />
- A feszültség megemelése alacsony frekvenciákon növelt indítónyomaték biztosításához<br />
(IR kompenzáció). Hatása 3 Hz-től a törésponti frekvencia feléig érvényesül, terheléstől<br />
való függése b3-al választható.<br />
beállítási tartománya: 0 – 25,5 %, 0,1 %-os lépésekben<br />
gyári alapérték: 5,1 %<br />
Ezt a paramétert a mérés során változtatni kell, lehet üzem közben is.<br />
Pr7: Szlipkompenzáció [Hz]<br />
- A frekvencia növelése a terhelés függvényében. A frekvenciának az alapjelhez képesti<br />
növelése a Pr5-tel beállított tartós áramerősségnél.<br />
Beállítása 0,1 %-os lépésekben, maximális értéke a b14-el beállított fHATÁR határfrekvencia<br />
értékétől függ:<br />
b14 maximális frekvencia növelés<br />
120 Hz 5 Hz<br />
240 Hz 10 Hz<br />
480 Hz 20 Hz<br />
gyári alapérték: 0 Hz<br />
Ezt a paramétert a mérés során változtatni kell.<br />
PrA: Az utolsó lekapcsolási ok tárolt hibakódjának előhívása<br />
M-4
Prc: Törésponti frekvencia<br />
- Az inverter kimenő feszültsége (motorfeszültség) ennél a frekvenciánál éri el legnagyobb<br />
(névleges) értékét. Általában itt történik a motor típusfrekvenciájának beállítása.<br />
Ez a paraméter alkalmas a különböző fluxusú táplálás megvalósításához.<br />
beállítási tartománya: fHATÁR/16 – fHATÁR (fHATÁR a b14-el beállított érték)<br />
gyári alapérték: 50 Hz<br />
A törésponti frekvenciát a mérés során változtatni kell, üzem közben nem lehet.<br />
2.4. A választókapcsolók (logikai változók) ismertetése<br />
b0: Alapjel választás: frekvencia vagy nyomaték<br />
b0 = 0 – nyomaték alapjel képzés<br />
b0 = 1 – frekvencia alapjel képzés<br />
gyári alapérték: b0=1<br />
b1: Viselkedés rövid ideig tartó feszültség kimaradás esetén<br />
b1 = 0 – automatikus újraindítás<br />
b1 = 1 – kezelői újraindítás<br />
b3: Kisfrekvenciás üzemi feszültségemelés<br />
b3 = 0 – terheléstől függő (dinamikus)<br />
b3 = 1 – terheléstől független (statikus)<br />
gyári alapérték: b3=0<br />
Ezt a paramétert b3=1 értékre kell állítani.<br />
b5: Vezérelt és fordulatszabályozott üzem közötti választás<br />
b5 = 0 – fordulatszabályozott<br />
b5 = 1 – frekvenciavezérelt<br />
gyári alapérték: b5=1<br />
b6: Az alapjeladás módja külső vezérlés esetén<br />
b6 = 0 – alapjeladás kapocslécen keresztül<br />
b6 = 1 – alapjeladás soros vonalon<br />
gyári alapérték: b6=0<br />
b8: Kijelzendő változó kijelölése<br />
b8 = 0 – a kimenő frekvencia kijelzése [Hz]<br />
b8 = 1 – a terhelés kijelzése [a készülék névleges áramának %-ban]<br />
gyári alapérték: b8=0<br />
A ∨- és a ∧- gombok együttes megnyomásával átválthatunk a két kijelzési lehetőség között.<br />
A gombok elengedése után a kijelzőn a b8-al beállított változó jelenik meg.<br />
b9: Frekvencia és vezérlés előválasztása<br />
b9 = 0 – kezelőegységről (klaviatúráról)<br />
b9 = 1 – kapocslécen keresztül<br />
gyári alapérték: b9=1<br />
Kezelőegységgel: frekvencia növelése: ∧- gomb<br />
frekvencia csökkentése: ∨- gomb<br />
M-5
14 A kapcsolási frekvencia és a frekvenciatartomány kiválasztása<br />
4 kapcsolási frekvencia választható:<br />
2.9 = 2,9 kHz; 5.9 = 5,9 kHz; 8,8 = 8,8 kHz; 11,7 = 11,7 kHz;<br />
3 frekvenciatartomány választható:<br />
0...120 Hz; 0...240 Hz; 0...480 Hz;<br />
gyári alapérték: 2.9; 120<br />
3. A hibajelzések összefoglalása<br />
Under Voltage<br />
A hálózati feszültség túl alacsony<br />
Over Voltage<br />
A hálózati feszültség túl magas<br />
Over (I) current<br />
Túláram<br />
Ixt trip<br />
Túlterhelés (áram*idő szorzat túllépés)<br />
Overheat<br />
Túlmelegedés (hűtőborda)<br />
thermisztor<br />
Túlmelegedés (motor)<br />
External trip<br />
Külső leállítás<br />
current loop loss<br />
Áram alapjel hiba<br />
PowerSupply<br />
Tápegység hiba<br />
Error<br />
Hardverhiba<br />
Összeállította: Kádár István<br />
2005. október<br />
M-6