ESCON 70/10 ハードウェア・リファレンス - Maxon motor
ESCON 70/10 ハードウェア・リファレンス - Maxon motor
ESCON 70/10 ハードウェア・リファレンス - Maxon motor

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
ケーブル断面<br />
長さ<br />
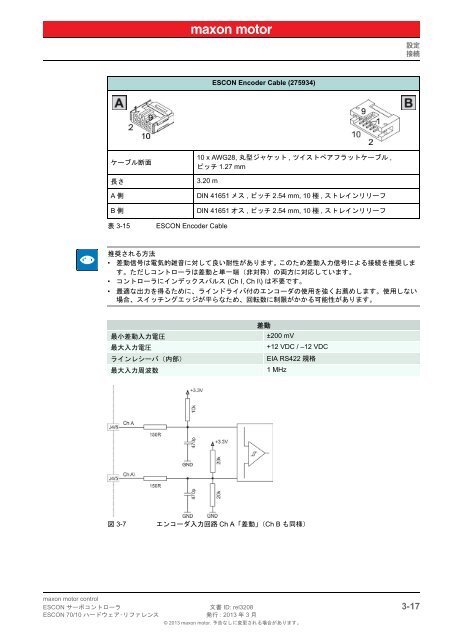
表 3-15 <strong>ESCON</strong> Encoder Cable<br />
<strong>ESCON</strong> Encoder Cable (275934)<br />
<strong>10</strong> x AWG28, 丸型ジャケット , ツイストペアフラットケーブル ,<br />
ピッチ 1.27 mm<br />
3.20 m<br />
A 側 DIN 41651 メス , ピッチ 2.54 mm, <strong>10</strong> 極 , ストレインリリーフ<br />
B 側 DIN 41651 オス , ピッチ 2.54 mm, <strong>10</strong> 極 , ストレインリリーフ<br />
推奨される方法<br />
• 差動信号は電気的雑音に対して良い耐性があります。 このため差動入力信号による接続を推奨しま<br />
す。ただしコントローラは差動と単一端(非対称)の両方に対応しています。<br />
• コントローラにインデックスパルス (Ch I, Ch I\) は不要です。<br />
• 最適な出力を得るために、ラインドライバ付のエンコーダの使用を強くお薦めします。使用しない<br />
場合、スイッチングエッジが平らなため、回転数に制限がかかる可能性があります。<br />
最小差動入力電圧<br />
最大入力電圧<br />
図 3-7 エンコーダ入力回路 Ch A「差動」(Ch B も同様)<br />
maxon <strong>motor</strong> control<br />
<strong>ESCON</strong> サーボコントローラ 文書 ID: rel3208 3-17<br />
<strong>ESCON</strong> <strong>70</strong>/<strong>10</strong> ハードウェア・リファレンス 発行 : 2013 年 3 月<br />
差動<br />
±200 mV<br />
+12 VDC / –12 VDC<br />
ラインレシーバ(内部) EIA RS422 規格<br />
最大入力周波数<br />
1 MHz<br />
© 2013 maxon <strong>motor</strong>. 予告なしに変更される場合があります。<br />
設定<br />
接続