Modi naturali ed analisi di stabilità dei sistemi dinamici lineari
Modi naturali ed analisi di stabilità dei sistemi dinamici lineari
Modi naturali ed analisi di stabilità dei sistemi dinamici lineari

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
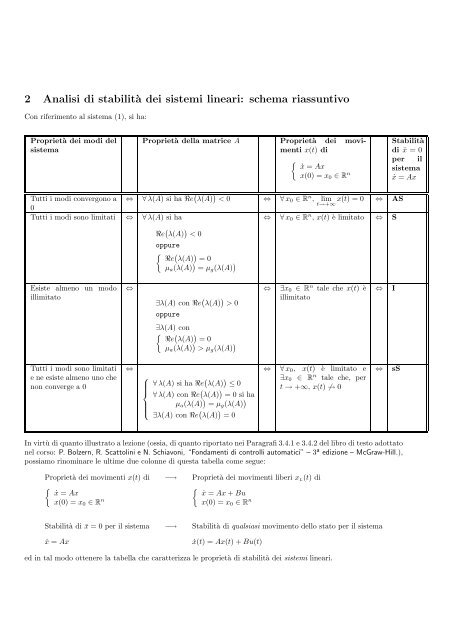
2 Analisi <strong>di</strong> <strong>stabilità</strong> <strong>dei</strong> <strong>sistemi</strong> <strong>lineari</strong>: schema riassuntivo<br />
Con riferimento al sistema (1), si ha:<br />
Proprietà <strong>dei</strong> mo<strong>di</strong> del<br />
sistema<br />
Proprietà della matrice A Proprietà <strong>dei</strong> movimenti<br />
x(t) <strong>di</strong><br />
˙x = Ax<br />
x(0) = x0 ∈ R n<br />
Tutti i mo<strong>di</strong> convergono a<br />
0<br />
⇔ ∀ λ(A) si ha ℜe λ(A) < 0 ⇔ ∀ x0 ∈ Rn , lim x(t) = 0<br />
t→+∞<br />
⇔ AS<br />
Tutti i mo<strong>di</strong> sono limitati ⇔ ∀ λ(A) si ha<br />
⇔ ∀ x0 ∈ Rn , x(t) è limitato ⇔ S<br />
Esiste almeno un modo<br />
illimitato<br />
Tutti i mo<strong>di</strong> sono limitati<br />
e ne esiste almeno uno che<br />
non converge a 0<br />
⇔<br />
⇔<br />
ℜe λ(A) < 0<br />
oppure<br />
ℜe λ(A) = 0<br />
µa(λ(A) = µg(λ(A) <br />
∃λ(A) con ℜe λ(A) > 0<br />
oppure<br />
∃λ(A) con<br />
ℜe λ(A) = 0<br />
µa(λ(A) > µg(λ(A) <br />
⎧<br />
∀ λ(A) si ha ℜe<br />
⎪⎨<br />
⎪⎩<br />
λ(A) ≤ 0<br />
∀ λ(A) con ℜe λ(A) = 0 si ha<br />
µa(λ(A) = µg(λ(A) <br />
∃λ(A) con ℜe λ(A) = 0<br />
⇔ ∃x0 ∈ R n tale che x(t) è<br />
illimitato<br />
⇔ ∀ x0, x(t) è limitato e<br />
∃x0 ∈ R n tale che, per<br />
t → +∞, x(t) → 0<br />
⇔ I<br />
⇔ sS<br />
In virtù <strong>di</strong> quanto illustrato a lezione (ossia, <strong>di</strong> quanto riportato nei Paragrafi 3.4.1 e 3.4.2 del libro <strong>di</strong> testo adottato<br />
nel corso: P. Bolzern, R. Scattolini e N. Schiavoni, “Fondamenti <strong>di</strong> controlli automatici” – 3 a <strong>ed</strong>izione – McGraw-Hill.),<br />
possiamo rinominare le ultime due colonne <strong>di</strong> questa tabella come segue:<br />
Proprietà <strong>dei</strong> movimenti x(t) <strong>di</strong> −→ Proprietà <strong>dei</strong> movimenti liberi x L(t) <strong>di</strong><br />
˙x = Ax<br />
x(0) = x0 ∈ R n<br />
˙x = Ax + Bu<br />
x(0) = x0 ∈ R n<br />
Stabilità <strong>di</strong> ¯x = 0 per il sistema −→ Stabilità <strong>di</strong> qualsiasi movimento dello stato per il sistema<br />
˙x = Ax ˙x(t) = Ax(t) + Bu(t)<br />
<strong>ed</strong> in tal modo ottenere la tabella che caratterizza le proprietà <strong>di</strong> <strong>stabilità</strong> <strong>dei</strong> <strong>sistemi</strong> <strong>lineari</strong>.<br />
Stabilità<br />
<strong>di</strong> ¯x = 0<br />
per il<br />
sistema<br />
˙x = Ax