CAPITOLO 2 Applicazioni catastali delle reti geodetiche GNSS
CAPITOLO 2 Applicazioni catastali delle reti geodetiche GNSS
CAPITOLO 2 Applicazioni catastali delle reti geodetiche GNSS

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
<strong>CAPITOLO</strong> 2<br />
<strong>Applicazioni</strong> <strong>catastali</strong> <strong>delle</strong> <strong>reti</strong> <strong>geodetiche</strong> <strong>GNSS</strong><br />
Responsabile: Mattia Crespi(1)<br />
Alberto Cina (2), Lucia Luzietti (1), Augusto Mazzoni (1), Livio Pinto(3), Aurelio Stoppini (4)<br />
2.1. INTRODUZIONE<br />
(1) DITS – Sapienza Università di Roma, via Eudossiana 18 – 00184 Roma<br />
(2) DITAG – Politecnico di Torino, corso Duca degli Abruzzi 24 – 10129 Torino<br />
(3) DIIAR – Politecnico di Milano, piazza Leonardo da Vinci 32 – 20133 Milano<br />
(4) DICA – Università degli Studi di Perugia, via Duranti 93 – 06125 Perugia<br />
La proposta, che ha come punto di partenza la specifica IntesaGIS sul Raffittimento primario GPS a<br />
7 km dei vertici geodetici IGM95, intende analizzare le attuali possibilità di rideterminazione dei<br />
Punti Fiduciali Catastali (PF) in un sistema di riferimento unico a livello nazionale (in tal senso si<br />
pone come revisione/estensione della specifica IntesaGIS) e le principali ricadute di tale<br />
rideterminazione dal punto di vista dell’integrazione tra il DB cartografico catastale e i DBT<br />
regionali, sia esistenti sia in corso/progetto di realizzazione.<br />
Tale proposta si articola complessivamente in quattro punti (definizione di una metodologia per la<br />
rideterminazione <strong>delle</strong> coordinate 2D dei PF nel sistema cartografico UTM-WGS84-ETRS89;<br />
definizione di una metodologia per la trasformazione del DB cartografico catastale nel sistema<br />
cartografico UTM-WGS84-ETRS89 per la sua integrazione con i DBT locali; definizione di una<br />
metodologia per la (ri)determinazione <strong>delle</strong> coordinate 3D dei PF nel sistema di riferimento<br />
WGS84-ETRS89; studio di fattibilità di un ulteriore raffittimento della rete GPS ai fini della<br />
rideterminazione ex-novo <strong>delle</strong> coordinate 3D dei PF nel sistema di riferimento WGS84-ETRS89)<br />
che riguardano tematiche accomunate dall’esigenza di rendere fruibili in un unico sistema di<br />
riferimento, e quindi più facilmente condivisibili, informazioni territoriali già in larghissima parte<br />
disponibili quali quelle <strong>catastali</strong>.<br />
In questo rapporto si esaminano approfonditamente i primi due punti, fornendo (come Allegati dei<br />
quali si indicano i rispettivi Autori) anche alcuni esempi di applicazioni relativamente al secondo<br />
punto, che, in assenza di un nuovo DB cartografico catastale vivamente auspicato, si ritiene di<br />
particolare importanza nell'ambito della pianificazione territoriale e urbanistica e, più in generale,<br />
della gestione del territorio:<br />
1. definizione di una metodologia per la rideterminazione <strong>delle</strong> coordinate 2D dei PF nel sistema<br />
cartografico (coordinate Est, Nord) UTM-WGS84-ETRS89 sulla base <strong>delle</strong> informazioni<br />
attualmente disponibili presso l’Agenzia del Territorio e della eventuale disponibilità di <strong>reti</strong> di<br />
stazioni permanenti <strong>GNSS</strong><br />
2. definizione di una metodologia per la trasformazione del DB cartografico catastale nel sistema<br />
cartografico (coordinate Est, Nord) UTM-WGS84-ETRS89 per la sua integrazione con i DBT<br />
locali (regionali, provinciali, comunali), sia esistenti sia in corso/progetto di realizzazione<br />
Si delineano, inoltre, alcune idee generali relative agli altri due punti:<br />
3. definizione di una metodologia per la (ri)determinazione <strong>delle</strong> coordinate 3D dei PF nel sistema<br />
93
94<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
di riferimento WGS84-ETRS89<br />
4. studio di fattibilità di un ulteriore raffittimento della rete GPS ai fini della rideterminazione exnovo<br />
<strong>delle</strong> coordinate 3D dei PF nel sistema di riferimento WGS84-ETRS89<br />
E’ indispensabile sottolineare subito che le prime due tematiche, 1. e 2., devono essere affrontate<br />
congiuntamente, in quanto intimamente connesse.<br />
Infatti, come maggiormente dettagliato nel seguito, se – in primo luogo – è opportuno utilizzare<br />
solo punti presenti sulle mappe di impianto, rappresentanti particolari attualmente ancora presenti<br />
sul territorio, per stimare i parametri <strong>delle</strong> trasformazioni “globali” (valide per un’intera origine<br />
catastale o per un solo foglio, nel caso di fogli non inquadrati in un sistema di riferimento)<br />
necessarie per portare il DB cartografico catastale nel sistema cartografico UTM-WGS84-ETRS89,<br />
la disponibilità <strong>delle</strong> coordinate 2D dei PF nel sistema cartografico UTM-WGS84-ETRS89 diventa<br />
essenziale – in secondo luogo – per stimare trasformazioni “locali” <strong>delle</strong> geometrie <strong>catastali</strong>, in<br />
modo da renderle coerenti con quelle di altri DB (ad esempio quelli comunali o regionali) assunti<br />
come riferimento dal punto di vista geometrico.<br />
Analogamente, anche le rimanenti due tematiche, 3. e 4., devono essere considerate<br />
congiuntamente, in quanto entrambe strettamente connesse sia all'attuale disponibilità di stazioni<br />
permanenti <strong>GNSS</strong> sul territorio nazionale sia al rapido sviluppo <strong>delle</strong> <strong>reti</strong> permanenti <strong>GNSS</strong><br />
destinate ai servizi di posizionamento (in tempo reale e/o in modalità post-processing) a livello<br />
regionale e sovra-regionale, alle quali si fa cenno nel precedente capitolo 1.<br />
E’ bene sottolineare, infine, che tutte le tematiche prendono in considerazione il sistema di<br />
riferimento WGS84-ETRS89 e il suo corrispondente cartografico UTM-WGS84-ETRS89.<br />
Attualmente, in ambito nazionale, tale sistema è ufficialmente materializzato dalla rete IGM95<br />
relativa alla realizzazione ETRF89. Pertanto, allo stato attuale, le rideterminazioni e le<br />
trasformazioni citate nelle quattro tematiche sopra descritte devono essere riferite alla realizzazione<br />
ufficiale ETRF89-IGM95, anche se, preferibilmente, dovrebbero esserlo alla più recente<br />
realizzazione ETRF2000, che prevedibilmente sarà adottata a partire da gennaio 2009 (documento,<br />
ancora riportato come “in fase di aggiornamento”, pubblicato sul sito IGM alla pagina web inerente<br />
la Rete Dinamica Nazionale http://87.30.244.175/rdn.php). Dal punto di vista metodologico il<br />
passaggio alla nuova realizzazione non comporta comunque modifiche alle procedure di seguito<br />
presentate.<br />
2.2. DEFINIZIONE DI UNA METODOLOGIA PER LA RIDETERMINAZIONE DELLE<br />
COORDINATE 2D DEI PF NEL SISTEMA CARTOGRAFICO UTM-WGS84-ETRS89<br />
2.2.1. Premessa<br />
Attualmente i PF, istituiti sulla base di quanto previsto dalla circolare n. 2/1987 dell’Agenzia del<br />
Territorio, sono circa 1.7 milioni e sono presenti con un’elevata densità (distanza relativa media<br />
250÷300 m) in tutte le zone del territorio nazionale interessate da interventi territoriali.<br />
Si tratta di punti che, progettati ed istituiti per l’aggiornamento della cartografia catastale, devono<br />
essere rappresentativi di particolari di manufatti:<br />
presenti sul territorio, per garantire la ricostruibilità dell’oggetto del rilievo<br />
rappresentati nella mappa catastale, per consentire l’introduzione dell’oggetto del rilievo nella<br />
mappa catastale secondo una procedura di “miglior adattamento”<br />
Tali punti, che devono risultare facilmente accessibili e stabilmente materializzati in modo che sia<br />
definita la loro posizione 2D, in generale, non sono stazionabili con sensori tradizionali (stazioni<br />
totali) o satellitari, ma sono ovviamente collimabili; per ognuno di essi, in generale è stata prodotta<br />
una scheda monografica, di cui l’Agenzia del Territorio conserva la storia <strong>delle</strong> variazioni,
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
contenente le coordinate cartografiche (informazione 2D) “lette” direttamente dalle mappe <strong>catastali</strong><br />
e non determinate attraverso operazioni topografiche di collegamento alla rete geodetica catastale.<br />
Per i PF si dispone inoltre <strong>delle</strong> distanze 2D (cosiddette “mutue distanze”) calcolate a partire dalle<br />
misure assunte nelle operazioni di rilievo necessarie per la redazione di atti di aggiornamento<br />
<strong>catastali</strong>. Si deve sottolineare che un siffatto patrimonio di informazioni, conservate e gestite<br />
dall’Agenzia, è stato di fatto prodotto a partire dal 1989 da diverse migliaia di tecnici abilitati alla<br />
redazione degli atti di aggiornamento suddetti, come attività propedeutica agli stessi.<br />
Oggi le distanze relative dei PF, note e conservate per tutti i PF utilizzati nei rilievi <strong>catastali</strong>, sono<br />
circa 17 milioni; esse sono state calcolate, con la procedura PREGEO (stima a minimi quadrati), sul<br />
piano della rappresentazione cartografica della mappa catastale da aggiornare (Cassini-Soldner,<br />
Gauss-Boaga, Sanson-Flamsteed).<br />
Per quanto concerne i PF, l’Agenzia del Territorio rende disponibili gratuitamente dal 2003,<br />
attraverso il proprio sito Internet (http://www.agenziaterritorio.gov.it/index.htm), i seguenti<br />
documenti:<br />
elenco <strong>delle</strong> monografie testuali dei PF – si tratta di un file ASCII (.taf) contenente i punti di una<br />
stessa provincia; viene aggiornato e pubblicato mensilmente<br />
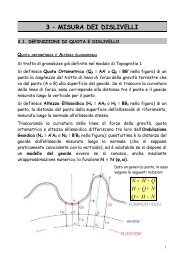
schede monografiche dei PF – si tratta di un file immagine (.pdf) contenente la monografia di un<br />
PF; viene pubblicato il giorno successivo alla sua immissione nella banca-dati catastale (Fig. 2.1)<br />
elenco <strong>delle</strong> distanze misurate dei PF – si tratta di un file ASCII (.dis) contenente le distanze<br />
misurate relative ai punti di una stessa provincia; viene aggiornato e pubblicato bimestralmente<br />
Si intuisce che se i PF fossero noti in un unico sistema cartografico UTM-WGS84-ETRS89<br />
potrebbero rappresentare un rilevante patrimonio di dati disponibili per svariate applicazioni<br />
geomatiche, oltre che <strong>catastali</strong>, in quanto realizzerebbero una materializzazione diffusa del sistema<br />
cartografico stesso. Una di tali applicazioni, ampiamente analizzata nel paragrafo successivo,<br />
riguarda la trasformazione <strong>delle</strong> geometrie dei DB <strong>catastali</strong> al fine di renderle coerenti con quelle di<br />
altri DB (ad esempio quelli comunali o regionali) assunti come riferimento dal punto di vista<br />
geometrico. E' importante in questo contesto richiamare l’attenzione su uno degli obiettivi che<br />
l’Agenzia del Territorio si prefiggeva di raggiungere con i PF, ovverosia “ottenere, con un limitato<br />
numero di aggiornamenti (rilievi), elementi metrici sufficienti per una corretta ricomposizione della<br />
maglia dei PF e dei rilievi ad essi connessi” (circolare n. 2/1988).<br />
L’utilizzabilità dei dati, prevalentemente disponibili per i PF ricadenti nelle aree soggette a<br />
variazioni territoriali, risulta naturalmente subordinata alla disponibilità di procedure di gestione ed<br />
elaborazione dati, oltre a tecniche di rilievo veloci ed efficienti per la determinazione <strong>delle</strong><br />
coordinate cartografiche UTM-WGS84-ETRS89 dei “punti fiduciali di inquadramento” (PFI),<br />
ovverosia di quei pochi PF ritenuti idonei, dal punto di vista geodetico (posizione nella rete) e<br />
logistico (facilità di rilievo), al collegamento della maglia dei PF al sistema cartografico nazionale.<br />
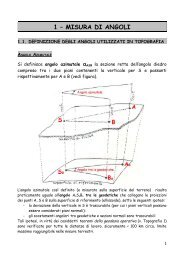
E’ importante ribadire che la presenza dei PF rilevati nelle sole aree soggette a variazioni territoriali<br />
non configura una rete connessa sull’intero territorio comunale (Fig. 2.2); rete che risulta addirittura<br />
assente nelle zone montane non urbanizzate. Questa condizione non pregiudica il lavoro proposto:<br />
sarà sempre possibile collegare alla rete inquadrata nel sistema UTM-WGS84-ETRF89 i PF rilevati<br />
in futuro, connettendoli ad essa, eventualmente, prevedendo il rilievo di nuovi PFI.<br />
95
96<br />
Figura 2.1 - Scheda monografica di un PF<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
2.2.2. Procedura<br />
Si propone nel seguito una procedura complessiva, che, a partire dalle informazioni attualmente<br />
disponibili presso l’Agenzia del Territorio, sopra menzionate, e della eventuale disponibilità di <strong>reti</strong><br />
di stazioni permanenti <strong>GNSS</strong> (diversamente si potrà far riferimento all’infittimento della rete<br />
IGM95), consenta la rideterminazione <strong>delle</strong> coordinate 2D dei PF nel sistema cartografico UTM-<br />
WGS84-ETRS89.<br />
Tale procedura si articola nelle seguenti fasi operative:<br />
raccolta dei dati
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
analisi preliminare dei dati<br />
determinazione <strong>delle</strong> coordinate UTM-WGS84-ETRF89 dei PFI con rilievi <strong>GNSS</strong><br />
elaborazione dei dati<br />
2.2.2.1. Raccolta dei dati<br />
Il reperimento dei dati utilizzati è sicuramente la fase di più facile esecuzione, in quanto essi sono<br />
contenuti nei file .taf e .dis.<br />
Nei suddetti file, sono contenute le informazioni sui PF ricadenti nel territorio di una stessa<br />
provincia, opportunamente codificate; in particolare il file .taf contiene la componente alfanumerica<br />
<strong>delle</strong> monografie dei PF mentre il file .dis contiene le distanze e relative precisioni (sqm) (Fig. 2.3).<br />
Figura 2.2 - Esempio della distribuzione dei PF nell'ambito di un territorio comunale<br />
(Guidonia-Montecelio, provincia di Roma)<br />
2.2.2.2. Analisi preliminare dei dati<br />
E’ questa una fase molto delicata alla quale deve essere posta la massima attenzione,<br />
indipendentemente dalla strategia di elaborazione successivamente scelta. Infatti, pur in presenza di<br />
una codifica standard <strong>delle</strong> informazioni (Fig. 2.4), che lascia immaginare un’agevole elaborazione<br />
informatica dei dati, si possono riscontrare una serie di difficoltà che generalmente incidono<br />
significativamente sui tempi dell’analisi preliminare dei dati.<br />
97
98<br />
Figura 2.3 - Contenuto del file .taf e del file .dis<br />
Figura 2.4 - Codifica standard del PF<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
L’analisi preliminare permette innanzitutto di individuare sostanzialmente due categorie di PF,<br />
definiti attuali e annullati; fra questi ultimi si distinguono quei particolari che non sono più presenti<br />
sul territorio per demolizione da quelli che, invece, sono ancora materializzati ma non sono ritenuti<br />
idonei ai fini <strong>catastali</strong>, ad esempio per sopravvenuta inaccessibilità; tale condizione, ovviamente,<br />
non li esclude dai punti rilevati presi in considerazione nell’operazione di inquadramento.<br />
Una possibile difficoltà di trattamento dei dati è legata alla nomenclatura dei PF; infatti, una volta<br />
che un PF è stato rilevato nell’ambito di un atto di aggiornamento, non è più possibile variare<br />
nessuno dei campi che lo descrivono nell’archivio dei PF a meno del campo descrizione. Per tale<br />
motivo, un PF, già oggetto di misure, si identifica con un nuovo numero ogni qualvolta varia uno
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
dei suoi elementi descrittivi (foglio e comune), la rappresentazione cartografica della mappa su cui<br />
ricade o le coordinate a seguito di inquadramento nella rete geodetica.<br />
La descrizione del particolare che materializza il PF in alcuni casi è limitata all’identificazione<br />
catastale del punto (esempio: triplice tra le particelle) e non comprende la descrizione univoca della<br />
sua materializzazione; è possibile, ad esempio, che non siano disponibili informazioni sulle<br />
modalità di accesso al punto o elementi toponomastici. Si può asserire che se i PF descritti nel file<br />
.taf presentano le informazioni sufficienti per una loro identificazione catastale, laddove si voglia<br />
ampliare l’ambito di utilizzazione dei punti sarebbe auspicabile integrare i campi esistenti con<br />
ulteriori campi descrittivi della materializzazione, accesso, riferimenti, ecc. Forse proprio il<br />
riconoscimento di una valenza non solo catastale ai PF potrebbe giustificare un ulteriore sforzo da<br />
parte dei tecnici anzidetti per integrare progressivamente con le suddette voci le informazioni<br />
relative ai PF.<br />
Per quanto concerne le distanze misurate dei PF si è constatata la tendenza (giustificata<br />
dall’obiettivo di rendere più celere e quindi economico il rilievo) di una parte dei tecnici<br />
professionisti a non ripetere le osservazioni ai PF già utilizzati in precedenti rilievi (es.<br />
accatastamento del fabbricato a seguito del frazionamento con cui si è definito il lotto edificatorio)<br />
ma a riproporre nel nuovo “libretto <strong>delle</strong> misure” le precedenti osservazioni; sono purtroppo noti<br />
anche casi in cui le “osservazioni” sono state calcolate a partire dalle coordinate dei PF e dalle<br />
distanze misurate.<br />
2.2.2.3. Determinazione <strong>delle</strong> coordinate UTM-WGS84-ETRF89 dei PFI con rilievi <strong>GNSS</strong><br />
I PFI da determinare mediante rilievi <strong>GNSS</strong> devono essere scelti tra i punti che presentano buone<br />
qualità dal punto di vista geodetico e logistico.<br />
Per quanto riguarda le tecniche di rilievo, considerati i risultati conseguiti nelle recenti<br />
sperimentazioni in ambito nazionale e tenuto conto della qualità dei rilievi eseguiti per gli atti di<br />
aggiornamento catastale strettamente connessa con i requisiti di precisione degli stessi previsti dalla<br />
circolare 2/1988, si può affermare che la tecnica <strong>GNSS</strong>-RTK che utilizza <strong>reti</strong> di stazioni permanenti<br />
<strong>GNSS</strong> costituisca una risorsa molto efficace, in termini di produttività e costi, per il rilievo dei PFI.<br />
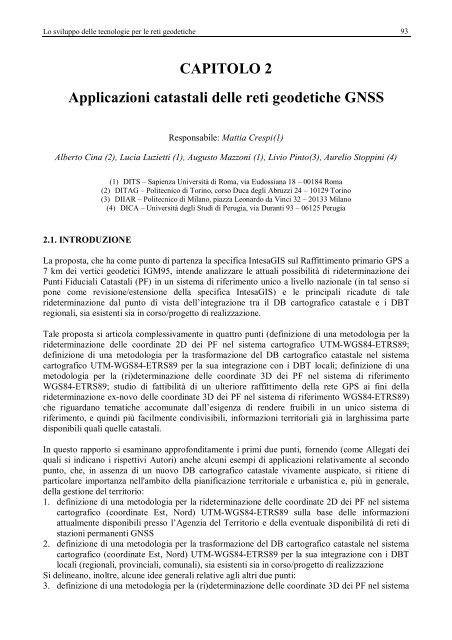
È tuttavia opportuno sottolineare che spesso, come già evidenziato, per la tipologia di<br />
materializzazione dei PF può essere necessario eseguire rilievi integrati con sensori <strong>GNSS</strong> e<br />
terrestri (ad es. intersezione diretta distanziometrica) (Fig. 2.5).<br />
Figura 2.5 - Rilievo integrato, con sensori <strong>GNSS</strong> e terrestri, dei PFI<br />
99
100<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
2.2.2.4. Elaborazione dei dati<br />
Sono state proposte due metodologie:<br />
la prima basata sulla compensazione <strong>delle</strong> distanze tra i PF (Conia et al.; Crespi e Reina)<br />
la seconda basata sulla “compensazione” dei triangoli fiduciali nella loro interezza, considerati<br />
come entità geometriche non disaggregabili, con vertici interconnessi tra di loro da legami rigidi<br />
(Beinat, Crosilla, Sossai)<br />
Compensazione <strong>delle</strong> distanze tra i PF<br />
L’elaborazione dei dati deve prevedere inizialmente un’analisi topologica della rete di distanze per<br />
evidenziare singolarità interne. Infatti, la rete dei PF non è interamente connessa a livello nazionale<br />
in quanto i punti sono presenti e rilevati solo nelle zone interessate da interventi territoriali.<br />
Inoltre si possono manifestare ovvie singolarità angolari, essendo la rete dei PF rilevati costituita da<br />
sole distanze sul piano cartografico.<br />
Successivamente è opportuno eseguire compensazioni a minimi vincoli anche parziali per sotto<strong>reti</strong><br />
(es. singole origini <strong>catastali</strong>), in modo da valutare e, se necessario, raffinare la qualità <strong>delle</strong> distanze<br />
(identificazione ed eliminazione degli outlier residui) e <strong>delle</strong> coordinate approssimate cartografiche<br />
(disponibili sulle schede monografiche e relative alle singole origini <strong>catastali</strong>). Tale calcolo<br />
preliminare è altresì utile per affinare la scelta dei Punti Fiduciali di Inquadramento (PFI), da<br />
rilevare tramite tecniche <strong>GNSS</strong>-RTK, rispetto ai quali la rete dei triangoli fiduciali deve essere<br />
inquadrata. La scelta dei PFI deve prendere in considerazione necessariamente anche la ridondanza<br />
locale della rete, talora scarsa a causa dell’assenza di osservazioni angolari.<br />
Infine, si deve procedere al calcolo <strong>delle</strong> coordinate approssimate dei PF nel sistema cartografico<br />
UTM-WGS84-ETRF89, mediante la trasformazione <strong>delle</strong> coordinate approssimate relative alle<br />
singole origini; a tal fine si possono usare le soluzioni analitiche proposte da diversi autori (Di<br />
Filippo, 2003; Cina, 2008).<br />
A questo punto sono disponibili le coordinate approssimate di tutti i PF coinvolti nel sistema<br />
cartografico UTM-WGS84-ETRF89 e le singole sotto<strong>reti</strong> risultano intrinsecamente compensate ed<br />
analizzate. Dovendo eseguire il calcolo finale nel sistema cartografico UTM-WGS84-ETRF89 è<br />
quindi necessario ridurre in tale sistema tutte le distanze tra i PF, comprese quelle che legano<br />
reciprocamente le sotto<strong>reti</strong>; tale questione è particolarmente evidente nelle aree rappresentate<br />
catastalmente da cartografia riferita a “piccole origini”.<br />
“Compensazione”dei triangoli fiduciali<br />
Tale metodo richiede inizialmente l’esame dei triangoli fiduciali, in quanto possono essere presi in<br />
considerazione solo i triangoli completi e, come per la metodologia precedente, devono essere<br />
evidenziate singolarità interne dovute a mancanza di connessione della rete e a singolarità angolari.<br />
Esso è basato sulle tecniche dell’analisi procustiana generalizzata e si prefigge di effettuare il<br />
miglior adattamento conforme ai minimi quadrati dei vari poligoni fiduciali. L’idea è utilizzare per<br />
la compensazione della rete non già le singole distanze tra PF, valutate in maniera disgiunta l’una<br />
dall’altra, bensì ogni singolo rilievo nella propria interezza, considerato come entità geometrica non<br />
disaggregabile. Tale metodo permette di individuare, stimare e risolvere gli eventuali sistematismi<br />
presenti nei dati di partenza; inoltre, preservando la forma dei poligoni fiduciali compensati, evita<br />
l’insorgenza di deformazioni anisotrope nel tessuto cartografico e mantiene inalterate le mutue<br />
relazioni tra i PF e i rilievi di aggiornamento ad essi appoggiati. La ricomposizione viene<br />
direttamente inquadrata sui Punti Fiduciali di Inquadramento (PFI), attribuendo alla<br />
trasformazione procustiana il compito di compensare le differenze di deformazione tra i sistemi<br />
cartografici catastale e UTM-WGS84-ETRF89.
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
2.2.3. Sperimentazioni<br />
Per verificare l’applicabilità <strong>delle</strong> procedure proposte sono state condotte da numerosi Autori<br />
diverse sperimentazioni (Beinat et al., 2005; Cina, 2008; Crespi e Reina, 2004; Pinto, 2008), che<br />
hanno mostrato essere possibile una georeferenziazione dei PF nel sistema cartografico nazionale<br />
UTM-WGS84-ETRF89 con precisioni dell’ordine di 10÷20 cm. Peraltro, se da un lato tale<br />
precisione è notevolmente dipendente, come è evidente, dalla qualità <strong>delle</strong> misure disponibili e dalla<br />
struttura della rete dei PF, dall’altro l’elevato numero di PF disponibili permette di selezionare solo<br />
i “migliori” ai fini del calcolo della rete e del suo inquadramento nel sistema cartografico nazionale<br />
UTM-WGS84-ETRF89.<br />
2.3. DEFINIZIONE DI UNA METODOLOGIA PER LA TRASFORMAZIONE DEL DB<br />
CARTOGRAFICO CATASTALE NEL SISTEMA CARTOGRAFICO UTM-WGS84-<br />
ETRS89<br />
2.3.1. Premessa<br />
La cartografia catastale costituisce l’unica cartografia a grande scala (1:2000 per l’80%) estesa a<br />
tutto il territorio nazionale ed è, per il tematismo rappresentato (possesso), lo strumento da cui non<br />
si può prescindere, unitamente al DB catastale ad esso collegato, per la gestione del territorio anche<br />
al di fuori dello scopo fiscale che ne ha dettato la formazione; rappresenta quindi un patrimonio<br />
unico di informazioni territoriali.<br />
Essa è caratterizzata dall’essere georeferenziata, per motivi storici durante la sua realizzazione<br />
(circa 70 anni: dal 1886 al 1956), in diverse centinaia di sistemi di riferimento, che ne rendono<br />
attualmente molto complessa l’interazione con altri DBT (in particolare quelli locali); in particolare,<br />
si individuano 818 sistemi di piccola estensione (“piccole origini”), alle quali corrisponde circa il<br />
35% <strong>delle</strong> mappe, e 32 sistemi di grande estensione (“grandi origini”), alle quali corrisponde il<br />
rimanente 65%.<br />
Attualmente, come già ricordato, per facilitare l’integrazione del DB catastale con altri DBT (ad<br />
esempio quelli regionali, provinciali o comunali), operazione di particolare rilevanza per la<br />
pianificazione territoriale e urbanistica e la gestione complessiva del territorio, si ritiene importante<br />
poter trasformare (dal punto di vista della georeferenziazione) il DB catastale nel sistema<br />
cartografico UTM-WGS84-ETRS89.<br />
Diventa pertanto necessario individuare una procedura efficiente per georeferenziare la cartografia<br />
catastale in un unico sistema cartografico; tale procedura è particolarmente importante (se non<br />
sostanzialmente necessaria) per le piccole origini, che costituiscono, vista la loro elevata<br />
numerosità, il problema principale per raggiungere il suddetto risultato. A tal proposito si deve<br />
tenere presente che, se da un lato sono stati proposti e possono ritenersi consolidati diversi algoritmi<br />
di trasformazione tra i diversi sistemi cartografici <strong>catastali</strong> ed il sistema UTM-WGS84-ETRS89,<br />
dall’altro la loro applicazione richiede la disponibilità <strong>delle</strong> coordinate <strong>delle</strong> origini <strong>catastali</strong> nel<br />
sistema UTM-WGS84-ETRS89 (Cina, 2008) oppure di “punti doppi”, ovvero punti di coordinate<br />
note nel generico sistema cartografico catastale e nel sistema UTM-WGS84-ETRS89 (Di Filippo,<br />
2003; Di Filippo, 2004). Il problema del cambio di sistema di riferimento è comunque complicato<br />
oltre che dalla incoerenza <strong>delle</strong> origini locali, dalla storia del sistema di riferimento nazionale a cui<br />
il catasto si appoggiò: la rete IGM ai tempi di inizio della formazione della mappa non era ancora<br />
ultimata e la conclusione dei lavori relativi alla rete geodetica avrebbe comportato notevoli ritardi<br />
nella formazione della mappa stessa. Il catasto si appoggiò dunque a coordinate IGM provvisorie<br />
frutto di calcoli parziali appoggiati a ellissoidi variamente orientati che rendono l’incoerenza dei<br />
sistemi di riferimento nella varie zone italiane ancora più marcata, complicando ulteriormente la<br />
trasformazione.<br />
101
102<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
E’ di primaria importanza, in quest’ambito, sottolineare che l’inserimento della cartografia catastale<br />
nel sistema cartografico nazionale UTM-WGS84-ETRF89 condotto “globalmente” (per un’intera<br />
origine catastale o per un solo foglio, nel caso di fogli non inquadrati in un sistema di riferimento)<br />
ha valenza esclusivamente cartografica e non topografica, ovverosia in termini di informazione<br />
tematica territoriale e non per i futuri aggiornamenti a scopo catastale. Infatti, le attuali mappe<br />
<strong>catastali</strong> sono il risultato di molteplici, disomogenei e diacronici rilievi di aggiornamento ciascuno<br />
dei quali è stato singolarmente inserito in mappa secondo il principio del miglior adattamento<br />
grafico (quindi introducendo deformazioni variabili localmente), a differenza <strong>delle</strong> mappe di<br />
impianto che rappresentano effettivamente il prodotto del rilievo eseguito originariamente in modo<br />
omogeneo. Conseguentemente, se ci si limita a trasformazioni “globali”, è illusorio ritenere che le<br />
mappe <strong>catastali</strong>, una volta inserite nel sistema cartografico UTM-WGS84-ETRF89, rappresentino<br />
oggetti correttamente georeferenziati in tale sistema (quindi rilevabili direttamente con sensori<br />
<strong>GNSS</strong>), anche tenendo conto dell’errore di graficismo alla scala della mappa; pertanto, anche se<br />
riferite nel sistema cartografico UTM-WGS84-ETRF89, le mappe <strong>catastali</strong> non potranno comunque<br />
essere aggiornate con tale tipologia di sensori in modo “diretto”, superando l’esigenza che ha<br />
portato all’introduzione dei punti fiduciali. Possono però risultare notevolmente utili come carte<br />
tematiche se associate ad altre informazioni territoriali disponibili a scale (nominali) inferiori a<br />
quelle proprie <strong>delle</strong> mappe <strong>catastali</strong>, quali le carte tecniche regionali (generalmente alle scale di<br />
1:5000 e 1:10000).<br />
Diversamente, la possibilità di rendere la cartografia catastale direttamente aggiornabile con rilievi<br />
eseguiti parzialmente o totalmente, ove possibile, con sensori <strong>GNSS</strong>, richiede che tutte le sue<br />
geometrie siano rese coerenti con quelle di altri DB (ad esempio quelli comunali o regionali) assunti<br />
come riferimento dal punto di vista geometrico. Questo risultato, molto più oneroso del precedente,<br />
può essere conseguito solo stimando trasformazioni “locali” <strong>delle</strong> geometrie <strong>catastali</strong>, sulla base<br />
della disponibilità di punti riconosciuti come corrispondenti sulla cartografia catastale e sul DB di<br />
riferimento; il riconoscimento di questa corrispondenza può essere notevolmente aiutato dalla<br />
conoscenza <strong>delle</strong> coordinate 2D dei PF nel sistema cartografico UTM-WGS84-ETRS89, tematica<br />
affrontata nel precedente paragrafo. Peraltro è necessario sottolineare che le trasformazioni “locali”<br />
inducono non solo variazioni di forma ma anche variazioni di area, con gli ovvi risvolti circa i diritti<br />
reali (in particolare la proprietà) costituiti su esse; tali variazioni devono essere compatibili con il<br />
limite di tolleranza del 5% (definito sulla base dei criteri stabiliti dall’art. 1538 del Codice Civile,<br />
dalla Circolare 30.10.1989, n. 5 della Direzione Generale del Catasto e dei Servizi Tecnici Erariali).<br />
A tale proposito è ulteriormente opportuno sottolineare che, al di là della valenza di disporre <strong>delle</strong><br />
coordinate 2D dei PF nel sistema cartografico UTM-WGS84-ETRS89 per possibili finalità non<strong>catastali</strong>,<br />
dal punto di vista catastale, una volta eseguita la stima <strong>delle</strong> trasformazioni “locali”,<br />
ovvero una volta che la cartografia catastale sia stata geometricamente resa coerente con un altro<br />
DB assunto come riferimento, dal punto di vista teorico non sussiste più lo scopo per cui i PF sono<br />
stati istituiti. Infatti, disponendo di una cartografia geometricamente corretta non solo in ambito<br />
locale (come è attualmente la cartografia catastale proprio grazie ai PF), l’aggiornamento di tale<br />
cartografia può essere condotto sia rispetto a riferimenti locali utilizzando strumentazione terrestre<br />
(come oggi avviene utilizzando i PF) sia con riferimenti globali, ovvero utilizzando direttamente<br />
sensori <strong>GNSS</strong>.<br />
Si possono quindi, complessivamente, distinguere due diversi processi:<br />
stima di trasformazioni “globali” per portare il DB cartografico catastale nel sistema cartografico<br />
UTM-WGS84-ETRS89, comunque necessarie per “attivare” la stima <strong>delle</strong> trasformazioni<br />
“locali”<br />
stima di trasformazioni “locali” <strong>delle</strong> geometrie <strong>catastali</strong>, in modo da renderle coerenti con<br />
quelle di altri DB assunti come riferimento dal punto di vista geometrico
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
2.3.2. Stima di trasformazioni “globali”<br />
Sono state proposte due metodologie:<br />
la prima basata sulla conoscenza di “punti doppi” (Di Filippo)<br />
la seconda basata sulla conoscenza <strong>delle</strong> coordinate <strong>delle</strong> origini <strong>catastali</strong> nel sistema UTM-<br />
WGS84-ETRS89 (Cina)<br />
2.3.2.1. Trasformazioni “globali” per punti doppi<br />
La metodologia, partendo dalle informazioni attualmente disponibili presso l’Agenzia del Territorio<br />
(in particolare le mappe di impianto, alle quali si ritiene necessario riferirsi per l’individuazione dei<br />
“punti doppi”) e dalla eventuale disponibilità di <strong>reti</strong> di stazioni permanenti <strong>GNSS</strong> (diversamente si<br />
potrà far riferimento all’infittimento della rete IGM95), consente la stima <strong>delle</strong> trasformazioni<br />
“globali” idonee a georeferenziare il DB catastale nel sistema cartografico UTM-WGS84-ETRS89.<br />
In generale si ipotizza la coerenza dei fogli di mappa di impianto nell’ambito della medesima<br />
origine, cosicché la ricerca dei punti doppi può essere effettuata per origine e non per foglio di<br />
mappa.<br />
Se da un lato sono consolidati gli algoritmi di trasformazione tra i diversi sistemi cartografici<br />
<strong>catastali</strong> ed il sistema UTM-WGS84-ETRF89 (Di Filippo, 2003; Di Filippo, 2004), dall’altro la loro<br />
applicazione richiede la disponibilità di “punti doppi”, ovvero punti di coordinate note nel generico<br />
sistema cartografico catastale e nel sistema UTM-WGS84-ETRF89.<br />
La determinazione <strong>delle</strong> coordinate dei “punti doppi” si articola essenzialmente in tre fasi:<br />
scelta dei punti, che necessariamente deve essere eseguita sulle mappe di impianto, in quanto<br />
costituiscono la base cartografica catastale più precisa e, soprattutto, intrinsecamente coerente<br />
(non deformata) dal punto di vista geodetico-cartografico<br />
misura <strong>delle</strong> coordinate cartografiche <strong>catastali</strong> dei punti prescelti<br />
rilievo <strong>delle</strong> loro posizioni sul territorio con sensori <strong>GNSS</strong> e stima <strong>delle</strong> loro coordinate<br />
cartografiche UTM-WGS84-ETRF89.<br />
E’ proprio in quest’ultima fase che la disponibilità dei servizi di posizionamento di una rete di<br />
stazioni permanenti <strong>GNSS</strong> può essere conveniente per velocizzare le operazioni. Si sottolinea che la<br />
scelta dei punti è probabilmente l’operazione più delicata, in quanto deve essere eseguita<br />
garantendo una sufficiente affidabilità della successiva trasformazione (sono necessari almeno 4<br />
punti) e, nel contempo, individuando punti che siano ancora effettivamente presenti e rilevabili sul<br />
territorio, operazione non sempre semplice – soprattutto nelle zone che hanno subito notevoli<br />
trasformazioni urbanistiche – se si considera che le mappe di impianto possono risalire anche a<br />
diverse decine di anni fa (comunque prima del 1956).<br />
2.3.2.2. Trasformazioni “globali” per origini<br />
La metodologia si basa su considerazioni geodetico-cartografiche che mostrano come sia possibile<br />
riproiettare i punti dal sistema cartografico catastale al sistema UTM-WGS84-ETRF89 passando<br />
tramite le superficie dei due ellissoidi corrispondenti purché sia nota l’origine del sistema catastale<br />
nel sistema UTM-WGS84-ETRF89. Se l’origine non è nota può essere ricavata a partire dalle sue<br />
coordinate approssimate mediante una procedura iterativa rapidamente convergente; tali coordinate<br />
approssimate, a loro volta, possono essere ricavate dalle coordinate di almeno due punti doppi.<br />
Conseguentemente, anche in questo caso, la disponibilità dei servizi di posizionamento di una rete<br />
di stazioni permanenti <strong>GNSS</strong> può essere conveniente per velocizzare le operazioni.<br />
2.3.2.3. Sperimentazioni (vedi Allegati 1 e 2)<br />
Per verificare l’applicabilità <strong>delle</strong> procedure proposte sono state condotte da alcuni Autori diverse<br />
sperimentazioni sia su “piccole” che su “grandi” origini <strong>catastali</strong> (Crespi e Reina, 2004; Crespi et<br />
Al., 2006, Cina, 2008). Tali sperimentazioni hanno mostrato che sono possibili trasformazioni<br />
“globali” con precisioni dell’ordine di alcune decine di cm, generalmente migliori <strong>delle</strong> tolleranze<br />
geometriche <strong>delle</strong> attuali carte tecniche regionali alla scala 1:5000.<br />
103
104<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
2.3.3. Stima di trasformazioni “locali”<br />
Sono state proposte due metodologie:<br />
la prima basata sulla preliminare trasformazione di PF nel sistema UTM-WGS84-ETRF89<br />
(Beinat, Crosilla, Sossai)<br />
la seconda basata sulla disponibilità di un DB di riferimento per le geometrie (Brovelli e<br />
Zamboni)<br />
E’ importante sottolineare da subito che le trasformazioni “locali” possono essere utili per realizzare<br />
la giunzione tra cartografie <strong>catastali</strong> riferite a origini diverse, problema particolarmente sentito nel<br />
caso di “piccole” origini.<br />
2.3.3.1. Trasformazioni “locali” per PF<br />
La metodologia si basa su tecniche di morfometria procustiana, analogamente a quella relativa alla<br />
“compensazione” dei triangoli fiduciali. L’idea di base è quella di considerare la mappa catastale<br />
come un mosaico, ossia una partizione geometrica, i cui elementi sono assimilabili alle singole<br />
particelle. La procedura proposta individua la mosaicatura ottimale, mediante adattamento<br />
conforme ai minimi quadrati, tra le preesistenti entità geometriche presenti in mappa ed i nuovi<br />
rilievi di aggiornamento. L’aggiornamento della carta avviene introducendovi progressivamente i<br />
nuovi rilievi in sostituzione di quelli preesistenti, e procedendo quindi a un riadattamento conforme<br />
a minimi quadrati di tutti gli elementi nuovi e di quelli vecchi rimanenti. L’adattamento opera in<br />
maniera da rispettare la forma di tutte le particelle, permettendo solo traslazioni, rotazioni e residue<br />
variazioni di scala, distribuendo però le eventuali deformazioni prevalentemente tra gli elementi<br />
originali della carta.<br />
La metodologia si basa su tre passi principali: compensazione della rete dei triangoli fiduciali<br />
secondo il metodo procustiano come già discusso in precedenza; l’inserimento dei rilievi di<br />
aggiornamento all’interno della maglia fiduciale ricomposta; adattamento degli elementi geometrici,<br />
per compensare le eventuali discrepanze tra elementi adiacenti e realizzare l’adattamento conforme<br />
tra geometrie nuove e vecchie.<br />
2.3.3.2. Trasformazioni “locali” per punti omologhi su due basi cartografiche<br />
La metodologia si basa sulla disponibilità di una base cartografica che viene assunta come<br />
riferimento geometrico e su una procedura di ricerca automatica di punti omologhi. Tale procedura<br />
si basa sulla stima di una trasformazione affine iniziale, che consente una sovrapposizione<br />
approssima della cartografia catastale con la base cartografica di riferimento, e si articola in tre<br />
passi: l’analisi <strong>delle</strong> coordinate dei punti che geometricamente descrivono gli oggetti, l’analisi della<br />
compatibilità <strong>delle</strong> “direzioni” dei segmenti uscenti dai punti stessi e infine l’analisi della<br />
compatibilità dell’informazione descritta dalla geometria (analisi semantica). Un ulteriore<br />
raffinamento della procedura prevede l’impiego di un approccio multirisoluzione che permette di<br />
ottenere una definizione più accurata nelle zone con alta densità di punti (generalmente zone<br />
urbanizzate in cui è auspicabile una maggior precisione nel processo di sovrapposizione)<br />
garantendo comunque una copertura totale dell’area da interpolare derivata dall’utilizzo di spline a<br />
bassa risoluzione nelle restanti zone.<br />
2.3.3.3. Sperimentazioni (vedi Allegato 3)<br />
Entrambi gli approcci sono già stati applicati dai rispettivi Autori su zone di estensione significativa<br />
(trasformazione per PF: comune di Udine Nord; trasformazione per punti omologhi: comune di<br />
Modena) con buoni risultati.
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
2.4. DEFINIZIONE DI UNA METODOLOGIA PER LA (RI)DETERMINAZIONE DELLE<br />
COORDINATE 3D DEI PF NEL SISTEMA DI RIFERIMENTO WGS84-ETRS89<br />
L'analisi di questo problema deve innanzitutto considerare che, allo stato attuale, i PF sono in<br />
generale materializzati in modo da individuarne univocamente la posizione 2D mentre non è in<br />
generale definito un cosiddetto “piano di paragone” al quale riferire la quota del PF.<br />
E' altresì vero che l'attuale versione della procedura PREGEO prescrive che i rilievi topografici<br />
relativi agli atti di aggiornamento siano 3D (anche se, stante la situazione attuale della cartografia<br />
catastale, non è indispensabile la considerazione della quota per l'esecuzione degli atti di<br />
aggiornamento) e quindi, in un prossimo futuro, un numero sempre maggiore di PF sarà inserito in<br />
rilievi che, potenzialmente, potranno consentire di determinarne la posizione 3D, sempre che venga<br />
definito univocamente e inserito nelle schede monografiche il “piano di paragone” suddetto.<br />
Tuttavia lo sviluppo di tali rilievi 3D potrebbe essere disomogeneo, sia dal punto di vista <strong>delle</strong> zone<br />
interessate sia da quello <strong>delle</strong> loro accuratezze e probabilmente richiede l'emanazione di normative<br />
di rilievo più dettagliate da parte dell'Agenzia del Territorio.<br />
Si tratta quindi di analizzare la questione da un punto di vista più generale, chiedendosi per quali<br />
scopi (e a quale livello di accuratezza) potrebbe essere utile determinare la posizione 3D dei PF nel<br />
sistema di riferimento WGS84-ETRF89, non sussistendo attualmente una effettiva necessità della<br />
loro determinazione 3D dal punto di vista dell'esecuzione degli atti di aggiornamento catastale.<br />
Tenendo presente le già menzionate accuratezze ragionevolmente conseguibili nella determinazione<br />
della loro posizione 2D (10 - 20 cm), certamente raggiungibili anche dal punto di vista altimetrico,<br />
si tratta quindi di considerare per quali scopi potrebbe essere utile una materializzazione diffusa (ma<br />
non omogenea, ovvero presente solo nelle zone interessate da interventi territoriali) del sistema di<br />
riferimento nazionale al livello di accuratezza di qualche decimetro, a fronte di una ingente mole di<br />
lavoro (e, conseguentemente, di tempo) necessaria per conseguirla. Allo stato attuale si ritiene che<br />
tale materializzazione potrebbe essere eventualmente impiegata in ambito fotogrammetrico, sia da<br />
aereo/elicottero che da satellite, limitatamente ovviamente ai PF effettivamente visibili, sia dal<br />
punto di vista dell'appoggio che da quello della validazione geometrica dei prodotti.<br />
D'altra parte, per la razionale gestione <strong>delle</strong> risorse disponibili e la valorizzazione degli investimenti<br />
già sostenuti da alcuni Enti, Regioni, Province Autonome e anche società private, è assolutamente,<br />
necessario considerare l'attuale rapida diffusione <strong>delle</strong> stazioni permanenti <strong>GNSS</strong> e lo sviluppo<br />
<strong>delle</strong> <strong>reti</strong> di stazioni permanenti <strong>GNSS</strong> destinate all'erogazione di servizi di posizionamento, che<br />
prevedibilmente, in un futuro prossimo, su tutto il territorio nazionale permetteranno di conseguire<br />
accuratezze di posizionamento di qualche centimetro in modalità post-processing e di pochi<br />
centimetri in tempo reale, in grado di soddisfare la pressoché totalità <strong>delle</strong> applicazioni tecniche,<br />
incluse quelle sopra menzionate.<br />
Conseguentemente, la valutazione congiunta di tutti gli elementi sopra menzionati (onerosità<br />
complessiva dell'operazione, inutilità per le attuali esigenze <strong>catastali</strong>, mediocrità <strong>delle</strong> accuratezze<br />
conseguibili e conseguente limitatezza <strong>delle</strong> possibili applicazioni, attuale sviluppo <strong>delle</strong><br />
infrastrutture per il posizionamento <strong>GNSS</strong> e necessità di valorizzazione degli investimenti già<br />
effettuati in tal senso) porta a concludere che non è conveniente determinare le posizioni 3D dei PF<br />
nel sistema di riferimento WGS84-ETRF89.<br />
105
106<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
2.5. STUDIO DI FATTIBILITÀ DI UN ULTERIORE RAFFITTIMENTO DELLA RETE<br />
GPS AI FINI DELLA RIDETERMINAZIONE EX-NOVO DELLE COORDINATE 3D DEI<br />
PF NEL SISTEMA DI RIFERIMENTO WGS84-ETRS89<br />
L'analisi di questo problema è contigua, anche se non identica, a quella sviluppata nel precedente<br />
paragrafo e, sempre per la razionale gestione <strong>delle</strong> risorse disponibili e la valorizzazione degli<br />
investimenti già sostenuti da alcuni Enti, Regioni, Province Autonome e anche società private, deve<br />
innanzitutto considerare lo stato attuale della rete fondamentale nazionale IGM95 e dei suoi ormai<br />
numerosi raffittimenti (sia a 7 km che a 3 km) regionali realizzati secondo le specifiche dell'Intesa<br />
Stato-Regioni-Enti Locali (tra i quali si possono citare: Lombardia, Province Autonome di Trento e<br />
Bolzano, Emilia Romagna, Umbria, Lazio, Abruzzo, Calabria, alcuni lotti della cosiddetta “maglia<br />
primaria” dei PF) e, come nel caso precedente, l'attuale rapida diffusione <strong>delle</strong> stazioni permanenti<br />
<strong>GNSS</strong> e lo sviluppo <strong>delle</strong> <strong>reti</strong> di stazioni permanenti <strong>GNSS</strong> destinate all'erogazione di servizi di<br />
posizionamento.<br />
Il problema va analizzato, a nostro parere, più che in termini di fattibilità (il raffittimento è<br />
un’operazione topografica di routine dal punto di vista tecnico, ed è ulteriormente semplificata dalla<br />
presenza sul territorio di <strong>reti</strong> di stazioni permanenti) e di utilità, in termini di convenienza.<br />
In questo contesto si tratta quindi di valutare se, per supportare le future operazioni di rilievo per<br />
scopi tecnici, sia conveniente procedere al completamento del raffittimento (almeno a 7 km) della<br />
rete IGM95 su tutto il territorio nazionale, oppure se le risorse debbano essere prioritariamente<br />
indirizzate alla diffusione su tutto il territorio nazionale <strong>delle</strong> <strong>reti</strong> di stazioni permanenti <strong>GNSS</strong><br />
destinate all'erogazione di servizi di posizionamento sia in tempo reale che in post-processing.<br />
Per operare tale valutazione, è opportuno tenere conto, da un lato, <strong>delle</strong> già menzionate potenzialità<br />
<strong>delle</strong> infrastrutture per il posizionamento <strong>GNSS</strong> e della necessità di valorizzare gli investimenti già<br />
effettuati in tal senso da numerose Amministrazioni e, dall'altro, dei prevedibilmente ingenti<br />
investimenti necessari (sia in termini di risorse che di tempo) per il completamento del<br />
raffittimento, che in ogni caso porterebbe ad un prodotto (la materializzazione di punti sul territorio)<br />
meno duraturo di un'infrastruttura permanente ben realizzata e ben gestita e comunque più oneroso<br />
da utilizzare da parte dei potenziali utenti (certamente per la necessità di almeno due ricevitori<br />
<strong>GNSS</strong> e, se non si opera in modalità RTK, per la non disponibilità di servizi di posizionamento in<br />
tempo reale).<br />
Inoltre, se è fuor di dubbio che la disponibilità di una rete materializzata a terra può essere comoda<br />
in molte situazioni e applicazioni (ad esempio: necessità di realizzare rilievi RTK in zone con scarsa<br />
copertura della telefonia cellulare; affinamento del modello locale del geoide e migliore<br />
distribuzione agli utenti del datum verticale, se associata a un raffittimento della livellazione e dei<br />
collegamenti GPS/LEV), tuttavia, è anche necessario sottolineare che tale comodità risulta tanto<br />
maggiore quanto più tale rete è adeguata alle esigenze specifiche <strong>delle</strong> applicazioni medesime. A tal<br />
fine, la rete materializzata a terra può sempre essere convenientemente realizzata "ad hoc", cioè<br />
proprio quando, dove e come serve, una volta che sia attivo un servizio di posizionamento,<br />
utilizzandolo generalmente in post-processing.<br />
In questo senso, la rete di infittimento materializzata a terra “in caso d'uso” rappresenta una<br />
sottostruttura del servizio di posizionamento realizzata per un'esigenza specifica ottenuta tramite un<br />
razionale “riuso” del servizio medesimo.<br />
Si noti altresì che la prevista Rete Dinamica Nazionale non appare di per sé sufficiente per la<br />
realizzazione di <strong>reti</strong> di infittimento materializzate a terra, a causa dell'interdistanza media <strong>delle</strong> sue<br />
stazioni permanenti, che comporterebbe la necessità di lunghe sessioni di misura e l'impiego di<br />
software scientifici per il trattamento dei dati, entrambe condizioni praticamente insostenibili.<br />
Conseguentemente, la valutazione congiunta di tutti gli elementi sopra menzionati porta a<br />
concludere che non è economicamente conveniente, in presenza di risorse economiche limitate,
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
procedere al completamento del raffittimento (almeno a 7 km) della rete IGM95 su tutto il territorio<br />
nazionale. Appare infatti più opportuno dedicare prioritariamente le risorse disponibili al<br />
completamento, alla manutenzione e alla gestione continua <strong>delle</strong> <strong>reti</strong> “attive” di stazioni permanenti.<br />
In ogni caso, per non disperdere il patrimonio di informazioni già attualmente disponibili, si ritiene<br />
comunque indispensabile procedere a una nuovo calcolo di compensazione della rete IGM95 e dei<br />
suoi attuali raffittimenti nel nuovo sistema di riferimento nazionale (ETRF2000) che,<br />
prevedibilmente, sarà materializzato dalla Rete Dinamica Nazionale.<br />
107
108<br />
2.6. BIBLIOGRAFIA<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
La bibliografia raccoglie i riferimenti relativi a:<br />
generalità sulla cartografia catastale<br />
lavori inerenti alla rideterminazione <strong>delle</strong> coordinate 2D dei PF nel sistema cartografico UTM-<br />
WGS84-ETRS89<br />
lavori inerenti alla trasformazione del DB cartografico catastale nel sistema cartografico UTM-<br />
WGS84-ETRS89 per la sua integrazione con i DBT locali (regionali, provinciali, comunali)<br />
altri lavori inerenti la cartografia catastale e le trasformazioni di coordinate che coinvolgono i<br />
sistemi cartografici <strong>catastali</strong><br />
Cartografia catastale<br />
G. Boaga (1941) Sulla Rappresentazione conforme di Gauss. Istituto Geografico Militare, Firenze, 1941.<br />
G. Boaga (1953). Principi fondamentali della moderna cartografia. Rivista del Catasto e dei Servizi Tecnici Erariali, n.<br />
2, 1953.<br />
G. Boaga (1953). Sulla rappresentazione cilindrica congruente di Soldner e sui problemi geo-cartografici<br />
dell’ingegneria, Rivista del Catasto e dei Servizi Tecnici Erariali, n. 5, 1953.<br />
B. Bonifacino (1968). La rappresentazione di Gauss nella formazione <strong>delle</strong> nuove mappe <strong>catastali</strong>, Rivista del Catasto e<br />
dei Servizi Tecnici Erariali, n. 5-6, 1968.<br />
A. Cina (2008). La carta catastale in un sistema globale. Rivista dell’Agenzia del Territorio. n. 1, 2008.<br />
S. Di Filippo (1995). Sulla trasformazione <strong>delle</strong> coordinate plano-cartografiche dalla rappresentazione di Cassini-<br />
Soldner alla rappresentazione di Gauss-Boaga e viceversa (parte prima), Rivista del Dipartimento del Territorio, n. 3,<br />
1995.<br />
S. Di Filippo (1996). Sulla trasformazione <strong>delle</strong> coordinate plano-cartografiche dalla rappresentazione di Cassini-<br />
Soldner alla rappresentazione di Gauss-Boaga e viceversa (parte seconda), Rivista del Dipartimento del Territorio, n. 1,<br />
1996.<br />
S. Di Filippo (1997). Sulla trasformazione <strong>delle</strong> coordinate plano-cartografiche dalla rappresentazione di Sanson-<br />
Flamsteed alla rappresentazione di Gauss-Boaga e viceversa nell’ambito dei sistemi di assi <strong>catastali</strong>, Rivista del<br />
Dipartimento del Territorio, n. 3, 1997.<br />
S. Di Filippo (2003). Sul passaggio <strong>delle</strong> coordinate plano-cartografiche <strong>catastali</strong> al sistema WGS84 e viceversa. Rivista<br />
dell’Agenzia del Territorio<br />
S. Di Filippo (2004). Situazione attuale e prospettive della cartografia catastale nell’ottica della riunificazione dei<br />
sistemi di riferimento. Rivista dell’Agenzia del Territorio.<br />
S. Di Filippo, F. Ferrante, P. R. Gnesivo (2005). Le attività di frontiera per un nuovo futuro della cartografia catastale.<br />
Rivista dell’Agenzia del Territorio.<br />
A. Guiducci (1953). Trasformazione <strong>delle</strong> coordinate Cassini-Soldner di piccoli sviluppi <strong>catastali</strong> in coordinate Gauss-<br />
Boaga. Rivista del Catasto e dei Servizi Tecnici Erariali, n. 2, 1953.<br />
Ministero <strong>delle</strong> Finanze (1988). Circolare n. 2/1988: Istruzione per il rilievo catastale di aggiornamento, 1988.<br />
A. Paroli (1943). Il problema della trasformazione <strong>delle</strong> coordinate nella rappresentazione conforme di Gauss e<br />
l’unificazione <strong>delle</strong> <strong>reti</strong> trigonometriche del nuovo stato, Rivista del Catasto e dei Servizi Tecnici Erariali, n. 3, 1943.<br />
A. Paroli (1948). Triangolazioni topografiche e del Catasto, Milano, Hoepli, 1948.<br />
A. Paroli (1958). Metodi e strumenti di rilevamento nei 70 anni di formazione del Catasto terreni. Rivista del Catasto e<br />
dei Servizi Tecnici Erariali.<br />
F. Radicioni, A. Stoppini (1999). Utilizzo di metodologie <strong>geodetiche</strong> per il coordinamento della cartografia catastale<br />
con le carte tecniche regionali. Bollettino SIFET, n.4, 1999.<br />
A. Stoppini (1992). Procedimento per la trasformazione diretta e inversa <strong>delle</strong> coordinate piane dal sistema catastale al<br />
sistema nazionale. Rivista del Catasto e dei Servizi Tecnici Erariali, n. 1, 1992.<br />
G. Targa, A. Vettore (1994). Nota tecnica sulle trasformazioni di coordinate plano-cartografiche dal sistema catastale<br />
Cassini-Soldner al sistema nazionale Gauss-Boaga, Rivista del Dipartimento del Territorio, n. 3, 1994
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
Lavori inerenti alla rideterminazione <strong>delle</strong> coordinate 2D dei PF nel sistema cartografico UTM-<br />
WGS84-ETRS89<br />
A. Beinat, F. Crosilla, M. Furlan, E. Sossai (2004). Ricomposizione procustiana della rete fiduciale catastale mediante<br />
dati dell'archivio Pregeo: l'esperienza di Gorizia. Atti dell’ 8 a Conferenza Nazionale <strong>delle</strong> Associazioni Scientifiche per<br />
le Informazioni Territoriali e Ambientali (ASITA), Roma, dicembre 2004.<br />
A. Beinat, F. Crosilla, E. Sossai (2005). Ricomposizione particellare conforme della cartografia catastale numerica, 50°<br />
Convegno Nazionale della Società Italiana di Fotogrammetria e Topografia, Mondello (Palermo), giugno 2005.<br />
L. Biagi, F. Sansò (Eds.) (2007). I servizi di posizionamento satellitare per l'e-government. Geomatics Workbooks n. 7 .<br />
G. Conia, R. Del Frate, N. Mencancini, D. Tufillaro (1992). Procedura automatica per il controllo della congruenza dei<br />
tipi di aggiornamento sulla base di un quadro d'unione della rete dei punti fiduciali e della misure GPS di alcuni lati<br />
significativi. Bollettino SIFET, n. 4, 1992.<br />
M. Crespi, G. Reina (2004). <strong>Applicazioni</strong> non <strong>catastali</strong> dei punti fiduciali: proposta di una metodologia per<br />
l’inquadramento della maglia dei punti fiduciali nel sistema cartografico UTM-WGS84-ETRF89, Bollettino SIFET, n.<br />
3, 2004.<br />
F. Crosilla, A. Beinat (2005). Matching Configurations by Robust Procrustes Methods, CLADAG SIS 2005, Parma,<br />
giugno 2005.<br />
L. Pinto (2008). Esperienze di inquadramento della maglia dei PF nel sistema cartografico UTM-WGS84-ETRF89 nelle<br />
province di Brescia e Piacenza (Comunicazione personale).<br />
G. Reina (2006). La materializzazione del sistema di riferimento tramite <strong>reti</strong> di stazioni permanenti <strong>GNSS</strong> in ambito<br />
globale e locale: metodologie di elaborazione dei dati e aspetti applicativi. Tesi di Dottorato di Ricerca in Infrastrutture<br />
e Trasporti - XIX Ciclo - Tutore: M. Crespi.<br />
E. Sossai (2005). La ricomposizione di una rete fiduciale catastale di ampie dimensioni: l'esempio di Tarcento (UD).<br />
Atti della 9 a Conferenza Nazionale <strong>delle</strong> Associazioni Scientifiche per le Informazioni Territoriali e Ambientali<br />
(ASITA), Catania, novembre 2005.<br />
Lavori inerenti alla trasformazione del DB cartografico catastale nel sistema cartografico UTM-<br />
WGS84-ETRS89 per la sua integrazione con i DBT locali (regionali, provinciali, comunali)<br />
A. Beinat, F. Crosilla, E. Sossai (2003). Riconoscimento automatico di entità geometriche non strutturate di una<br />
cartografia catastale, Bollettino della Società Italiana di Fotogrammetria e Topografia, n. 4,2003.<br />
A. Beinat, F. Crosilla, E. Sossai (2003). Ricerca automatica di corrispondenze fra entità geometriche di una cartografia<br />
catastale. Atti della 7 a Conferenza Nazionale <strong>delle</strong> Associazioni Scientifiche per le Informazioni Territoriali e<br />
Ambientali (ASITA), Verona, ottobre 2003.<br />
A. Beinat, F. Crosilla (2003). Generalised procustes algorithms for the conformal updating of a cadastral<br />
map, Zeitschrift für Geodäsie ZfV, 128 n. 5/2003, pp. 341-349.<br />
A. Beinat, F. Crosilla (2003). A new proposal for the general and optimal conformal updating of a cadastral digital<br />
map: the Italian case, International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences,<br />
XXXIV-6/W11, 15-18 ottobre 2003, Zagreb, Croatia.<br />
A. Beinat, F. Crosilla, E. Sossai (2004). Automatic Point matching of GIS geometric figures, International Archives of<br />
Photogrammetry, Remote Sensing and Spatial Information Sciences, XXXV, B3, 12-23 luglio 2004, Istanbul, Turkey.<br />
A. Beinat, F. Crosilla, E. Sossai (2004). An automatic analytical procedure for searching corresponding feature points<br />
in a cadastral map, FIG Working Week 2004, "The Olympic Spirit in Surveying", 22-27 maggio 2004“ Athens, Greece.<br />
A. Beinat, F. Crosilla, E. Sossai (2005). Un metodo particellare per l'aggiornamento progressivo della cartografia<br />
catastale. Atti della 9 a Conferenza Nazionale <strong>delle</strong> Associazioni Scientifiche per le Informazioni Territoriali e<br />
Ambientali (ASITA), Catania, novembre 2005.<br />
L. Biagi, F. Sansò (Eds.) (2007). I servizi di posizionamento satellitare per l'e-government. Geomatics Workbooks n. 7 .<br />
M. A. Brovelli, G. Zamboni (2003). Integrazione di basi cartografiche su grandi aree. Bollettino SIFET, n. 4, 2003.<br />
M. A. Brovelli, G. Zamboni (2003). Procedure automatiche per l’integrazione di differenti basi cartografiche. Atti della<br />
7 a Conferenza Nazionale <strong>delle</strong> Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA),<br />
Verona, ottobre 2003.<br />
M. A. Brovelli, G. Zamboni (2003). Automatic detection of homologous points in heterogeneous maps, International<br />
Workshop on Next Generation Geospatial Information, October 19-21, 2003, Cambridge (Boston), Massachusetts,<br />
USA.<br />
109
110<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
M. Crespi, G. Reina (2004). Inquadramento di mappe <strong>catastali</strong> nel sistema cartografico UTM-WGS84-ETRF89<br />
mediante rilievi GPS-RTK rispetto a stazioni permanenti. Atti della 8 a Conferenza Nazionale <strong>delle</strong> Associazioni<br />
Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Roma, dicembre 2004.<br />
F. Crosilla, A. Beinat (2007). Ricerca automatica di variazioni locali tra configurazioni spaziali puntuali mediante<br />
Analisi Procustiana Robusta. Atti della 11 a Conferenza Nazionale <strong>delle</strong> Associazioni Scientifiche per le Informazioni<br />
Territoriali e Ambientali (ASITA), Torino, novembre 2007.<br />
F. Di Sanza (2006). Inquadramento della cartografia catastale nel sistema di riferimento WGS84-ETRF89:<br />
organizzazione ed esecuzione dei rilievi GPS su punti di impianto nella Regione Lazio. Tesi di Laurea in Ingegneria per<br />
l'Ambiente ed il Territorio - Relatore: M. Crespi, Correlatori: G. Reina, A. Mazzoni.<br />
G. Reina (2006). La materializzazione del sistema di riferimento tramite <strong>reti</strong> di stazioni permanenti <strong>GNSS</strong> in ambito<br />
globale e locale: metodologie di elaborazione dei dati e aspetti applicativi. Tesi di Dottorato di Ricerca in Infrastrutture<br />
e Trasporti - XIX Ciclo - Tutore: M. Crespi.<br />
E. Sossai (2003). Ricerca automatica di corrispondenze fra entità geometriche di una cartografia catastale. Tesi di laurea<br />
in Ingegneria (Relatore: F. Crosilla).<br />
E. Sossai (2006). Ricomposizione cartografica mediante integrazione di rilievi PREGEO e di cartografia numerica<br />
esistente. Atti della 11 a Conferenza Nazionale <strong>delle</strong> Associazioni Scientifiche per le Informazioni Territoriali e<br />
Ambientali (ASITA), Bolzano, novembre 2006.<br />
Altri lavori<br />
A Cina, A. Manzino, G. Manzino (2007). I ricevitori palmari in applicazioni <strong>catastali</strong>. Atti della 11 a Conferenza<br />
Nazionale <strong>delle</strong> Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Torino. novembre<br />
2007.<br />
M. Crespi (2003). Rilevamenti GPS-RTK e <strong>reti</strong> di stazioni permanenti: stato dell’arte, sperimentazioni e possibili<br />
applicazioni. Geocentro XXVI.<br />
M. Crespi, G. M. Malena, G. Reina (2003). Rilevamenti GPS-RTK e <strong>reti</strong> di stazioni permanenti: situazione attuale e<br />
possibili applicazioni. Atti della 7 a Conferenza Nazionale <strong>delle</strong> Associazioni Scientifiche per le Informazioni<br />
Territoriali e Ambientali (ASITA), Verona, ottobre 2003.<br />
M. Crespi, G. Reina (2005). Reti di stazioni permanenti <strong>GNSS</strong> a supporto dell'aggiornamento di un DB cartografico: il<br />
caso della cartografia catastale. Atti della 9 a Conferenza Nazionale <strong>delle</strong> Associazioni Scientifiche per le Informazioni<br />
Territoriali e Ambientali (ASITA), Catania, novembre 2005.<br />
G. Fastellini, F. Radicioni, A. Stoppini (2008). L’impiego <strong>delle</strong> tecniche <strong>GNSS</strong> in tempo reale a rete per applicazioni<br />
<strong>catastali</strong> nel quadro attuale della cartografia e della normativa. Atti del Congresso Nazionale SIFET, Sorrento, giugno<br />
2008.<br />
G. Paggi, A. Stoppini, L. Surace (1994). Trasformazioni di coordinate nei rilievi GPS. Bollettino di Geodesia e SS.AA.,<br />
IGM, n. 3, 1994.<br />
G. Paggi, A. Stoppini, L. Surace (1994). Tecniche per l'inserimento di rilievi GPS nella cartografia esistente. Bollettino<br />
ASIT, n. 25/26, 1994.<br />
F. Radicioni, A. Stoppini (1996). Trasformazioni di coordinate e di datum geodetico nella cartografia italiana.<br />
Relazione presentata al XXXII Convegno Nazionale della Associazione Italiana di Cartografia, Piacenza, maggio 1996.<br />
Bollettino A.I.C., n. 96-97, 1996.<br />
F. Radicioni, A. Stoppini (1997). Georeferenziazione <strong>delle</strong> informazioni territoriali ed evoluzione <strong>delle</strong> <strong>reti</strong> <strong>geodetiche</strong>.<br />
Atti della 1 a Conferenza Nazionale <strong>delle</strong> Associazioni Scientifiche per le Informazioni Territoriali e Ambientali<br />
(ASITA), Parma, settembre-ottobre 1997.<br />
F. Radicioni, A. Stoppini (2004). Esecuzione di rilievi <strong>catastali</strong> di aggiornamento con la tecnica GPS. Atti della 8 a<br />
Conferenza Nazionale <strong>delle</strong> Associazioni Scientifiche per le Informazioni Territoriali e Ambientali (ASITA), Roma,<br />
dicembre 2004.<br />
A. Stoppini, L. Surace (1991). L'integrazione tra sistemi cartografici locali e sistema cartografico nazionale per la georeferenziazione<br />
<strong>delle</strong> informazioni territoriali. Relazione presentata al XXVII Convegno Nazionale della Associazione<br />
Italiana di Cartografia, Todi, maggio 1991. Bollettino A.I.C., 1991.
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
Allegati<br />
Si allegano al presente capitolo, a scopo di documentazione e approfondimento, alcuni contributi di<br />
ricerca redatti da ricercatori italiani, alcuni dei quali pur non facendo parte del gruppo incaricato dal<br />
CISIS hanno cortesemente acconsentito a includere i propri lavori nel presente volume:<br />
2.1 - Trasformazioni globali per Punti Doppi<br />
Mattia Crespi, Augusto Mazzoni<br />
DITS – Area di Geodesia e Geomatica - Sapienza Università di Roma<br />
2.2 - Trasformazioni globali per Coordinate dell'Origine Catastale<br />
Alberto Cina<br />
Politecnico di Torino – DITAG<br />
2.3 - Ricerca automatica di punti omologhi tra le carte e trasformazione mediante<br />
funzioni spline multirisoluzione<br />
Maria Antonia Brovelli e Giorgio Zamboni<br />
DIIAR – Politecnico di Milano<br />
2.4 - Ricomposizione Procustiana della Rete Fiduciale e della Cartografia Catastale Numerica<br />
Alberto Beinat, Fabio Crosilla, Emiliano Sossai<br />
Università di Udine, Laboratorio di Geomatica Computazionale - interreg.cart@uniud.it<br />
111
112<br />
Allegato 2.1<br />
Trasformazioni globali per Punti Doppi<br />
Mattia Crespi, Augusto Mazzoni<br />
DITS – Area di Geodesia e Geomatica - Sapienza Università di Roma<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
Introduzione<br />
La metodologia si basa sulle informazioni attualmente disponibili presso l’Agenzia del Territorio<br />
(in particolare le mappe di impianto, alle quali si ritiene necessario riferirsi per l’individuazione dei<br />
“punti doppi”, ovvero punti di coordinate note nel generico sistema cartografico catastale e nel<br />
sistema UTM-WGS84-ETRF89) e sugli ormai consolidati algoritmi di trasformazione tra i diversi<br />
sistemi cartografici <strong>catastali</strong> ed il sistema UTM-WGS84-ETRF89 (cfr. in Bibliografia Di Filippo,<br />
2003; Di Filippo, 2004). Si ipotizza, inoltre, la coerenza dei fogli di mappa di impianto nell’ambito<br />
della medesima origine, cosicché la ricerca dei punti doppi può essere effettuata per origine e non<br />
per foglio di mappa.<br />
Tale metodologia può evidentemente trarre notevole vantaggio dalla eventuale disponibilità di <strong>reti</strong><br />
di stazioni permanenti <strong>GNSS</strong>, che consentono la rapida determinazione <strong>delle</strong> coordinate dei punti<br />
doppi nel sistema UTM-WGS84-ETRF89 con accuratezze sempre ampiamente accettabili per<br />
questa applicazione; diversamente, anche in assenza di tali infrastrutture, è comunque sempre<br />
applicabile utilizzando la rete IGM95 o suoi eventuali infittimenti.<br />
Operazione cruciale per la proficua applicazione della metodologia è quindi l'identificazione dei<br />
punti doppi e la determinazione <strong>delle</strong> loro coordinate nel generico sistema cartografico catastale e<br />
nel sistema UTM-WGS84-ETRF89<br />
Infatti, la rete geodetica catastale, formata nei primi decenni del secolo scorso, non è<br />
sostanzialmente più disponibile, in quanto buona parte dei vertici sono andati dispersi. E’<br />
ragionevole desumere, dunque, le coordinate cartografiche <strong>catastali</strong> dei punti doppi dal primo<br />
prodotto cartografico ottenuto a partire dalla suddetta rete, ovverosia dalla “cartografia catastale<br />
d’impianto”, prodotto cartografico intrinsecamente coerente dal punto di vista della<br />
georeferenziazione e dell'accuratezza media (ovviamente in dipendenza della scala adottata), a<br />
differenza della cartografia catastale attuale, risultato di successivi diacronici aggiornamenti,<br />
condotti secondo metodologie che sono variate nel tempo e che, conseguentemente, non<br />
garantiscono la coerenza sopra menzionata.<br />
E' proprio per questo fondamentale motivo che i punti doppi sui quali si basa la metodologia<br />
proposta devono essere scelti tra quelli già presenti sulla cartografia catastale di impianto, ovvero<br />
devono essere “punti di impianto”.<br />
Ne deriva la delicatezza da porre nell'operazione di scelta dei punti di impianto, la cui qualità<br />
condiziona quella della trasformazione e che devono essere ancora effettivamente presenti e<br />
rilevabili sul territorio (se possibile, direttamente con sensori <strong>GNSS</strong>, per massimizzare l'efficienza<br />
della metodologia), condizione non banale - soprattutto nelle zone che hanno subito notevoli<br />
trasformazioni urbanistiche - se si considera che le mappe di impianto possono risalire anche a<br />
diverse decine di anni fa (comunque prima del 1956).<br />
Un'efficiente strategia per l'individuazione di punti di impianto, comoda soprattutto per<br />
l'applicazione della metodologia alle “grandi” origini <strong>catastali</strong> stante la grande numerosità dei<br />
possibili candidati, si basa sul selezionare dalla TAF (Tabella Attuale dei punti Fiduciali (TAF) i PF<br />
aventi alla data di istituzione un’attendibilità 1 pari a 10, ovverosia quei punti le cui coordinate sono<br />
1 Il codice di attendibilità che si associa alle coordinate dei punti rilevati (PF e vertici particellari), definito dalla<br />
Circolare n. 2/1988 è costituito da un numero di 2 cifre compreso nell’intervallo 20÷68 (nel 2004 la disposizione che ha<br />
introdotto l’utilizzo dei sensori <strong>GNSS</strong> nel rilievo catastale ha ampliato l’intervallo a 20÷88); esso sintetizza le<br />
informazioni qualitative sulle coordinate di un punto rilevato in funzione <strong>delle</strong> variabili esterne (rete di appoggio) e di<br />
quelle interne (metodologia e strumenti di rilievo) all’attività del tecnico.
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
state “lette” dalla mappa di impianto.<br />
E' opportuno considerare, inoltre, che le coordinate dei punti doppi nei sistemi cartografici <strong>catastali</strong><br />
vengono lette direttamente sulla carta e la loro accuratezza media è comunque condizionata<br />
dall'errore di graficismo (circa 0.2 mm); non ha quindi particolare significato utilizzare<br />
trasformazioni complesse: in generale è sufficiente una rototraslazione piana con variazione di scala<br />
e, eventualmente, possono essere provate e confrontate, valutandone la significatività statistica dei<br />
parametri, le trasformazioni affine particolare a 5 parametri e affine generale a 6 parametri.<br />
Si illustra nel seguito l'applicazione di tale metodologia alla “grande” origine catastale di Roma-<br />
Monte Mario (cartografia nel sistema Cassini-Soldner), estesa su quasi tutto il territorio della<br />
regione Lazio e su porzioni di regioni limitrofe (Umbria, Abruzzo, Campania).<br />
Le fasi operative, di validità generale e pertanto applicabili a qualsiasi altra origine catastale, sono<br />
riassumibili nei seguenti punti:<br />
Individuazione dei punti doppi - Sono stati individuati circa 7000 PF per i quali le coordinate<br />
di impianto della TAF sono state “lette” dalle mappe di impianto (attendibilità pari a 10),<br />
nelle province di Pescara, L’Aquila, Viterbo, Rieti, Roma, Frosinone, Latina, Caserta<br />
Selezione dei punti doppi – Sono stati selezionati tra quelli di cui al punto 1. secondo diversi<br />
criteri così riassumibili:<br />
distribuzione omogenea all’interno della Regione Lazio<br />
assenza di variazioni dall’epoca del loro impianto<br />
(verifica della descrizione con l'immagine presente sulla monografia)<br />
materializzazione che consente il rilievo diretto con sensori <strong>GNSS</strong><br />
Rilievo dei punti selezionati - Sono stati rilevati i PF selezionati con sensori <strong>GNSS</strong> operando in<br />
modalità RTK e utilizzando i prodotti per il posizionamento in tempo reale forniti dalla rete<br />
permanente RESNAP-GPS (w3.uniroma1.it/resnap-gps)<br />
Stima dei parametri di trasformazione - Sono stati stimati i parametri della trasformazione<br />
globale applicando i menzionati algoritmi di Di Filippo, estesi in modo da poter confrontare<br />
diverse trasformazioni globali (rototraslazione piana con variazione di scala, affine generale)<br />
Individuazione e selezione dei punti doppi<br />
Per l’acquisizione dei dati è individuato inizialmente un set di 3412 PF aventi attendibilità 10 e<br />
appartenenti all'origine di Roma Monte Mario (stralcio nelle Tabelle 1 e 2). Questo approccio<br />
metodologico ha permesso di disporre di un cospicuo numero di “punti doppi” (ovvero<br />
rappresentati nella mappa d’impianto e ancora presenti sul territorio) in modo veloce non dovendo<br />
subordinare al sopralluogo sul territorio la verifica sull’esistenza del particolare rappresentato nella<br />
mappa d’impianto.<br />
Prima di applicare i citati criteri di selezione, per comodità di visualizzazione si sono trasformate le<br />
coordinate cartografiche dei PF considerati nel sistema UTM-WGS84-ETRF89 con un software<br />
commerciale (CartLab 2) che garantisce in questo caso accuratezze di ordine metrico, più che<br />
La 1 a cifra (da 2 a 6) caratterizza le metodologia di rilievo: allineamento e squadri (2), celerimensura tradizionale (3 e<br />
4), celerimensura elettro-ottica (5 e 6).<br />
La 2 a cifra (da 0 a 8) caratterizza i PF utilizzati per l’appoggio del rilievo: PF di aggiornamento (0), PF di impianto (2),<br />
rete mista (4), rete catastale (6), rete geodetica (8).<br />
Il codice di attendibilità attribuito alle coordinate dei PF in fase di istituzione, definito dalla Circolare n. 2/1987, è<br />
costituito da un numero di 2 cifre compreso nell’intervallo 1÷12 (successivamente tale intervallo è stato ampliato a<br />
1÷19).<br />
L’attendibilità da 1 a 9 caratterizza i PF le cui coordinate sono analitiche: vertici della rete IGM (1÷5) della rete<br />
catastale (6÷8) e punti stabili di riferimento (9).<br />
L’attendibilità da 10 a 12 caratterizza i PF le cui coordinate sono state desunte dal supporto cartografico e con non sono<br />
stati rilevati con atti di aggiornamento.<br />
113
114<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
sufficienti per consentire l’operazione di selezione; successivamente i punti sono stati visualizzati<br />
(tramite il software Microsoft ® AutoRoute) e quindi si è proceduto alla selezione (Figura 2).<br />
Complessivamente sono stati accettati 121 PF, risultati, dalle monografie, accessibili e rilevabili<br />
direttamente con sensori <strong>GNSS</strong> (Figura 3).<br />
Figura 2 - Esempi di PF accettato (sinistra) e scartato (destra)
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
Tabella 1 - Tabella PF: codice e dati generali<br />
Provincia: L’Aquila, Pescara, Viterbo, Rieti, Roma, Frosinone, Latina, Caserta<br />
Comune: sono stati presi in considerazione circa 530 comuni relativi alle province<br />
Codice identificativo: si tratta di una stringa di 11 caratteri con il seguente formato:<br />
PP-CCCC.Z-FFFF.A-FF<br />
-PP: sigla della provincia<br />
-CCCC: codice nazionale del comune (es.: H501 per il comune di Roma)<br />
-Z codice della sezione censuaria (es. A). Se la sezione è assente si utilizza il carattere ‘_’<br />
-FFFF: numero del foglio (es. 0001 per il foglio numero 1)<br />
-A: codice allegato. Assume il valore 0 se la mappa non è un allegato<br />
-FF: numero identificativo del PF<br />
Esempio : LT-F224.0-0044.0-02<br />
Coordinate cartografiche Est e Nord del punto nel sistema di rappresentazione cartografica Cassini-<br />
Soldner<br />
115
116<br />
Tabella 2 - Tabella PF: attendibilità e descrizioni<br />
Attendibilità: compresa nell’intervallo 1-10<br />
Descrizione originaria del punto all’impianto della TAF<br />
Descrizione attuale del punto nella TAF attuale<br />
M. Barbarella, F. Radicioni, F. Sansò editori
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
Figura 3 - I PF selezionati<br />
Rilievo dei punti selezionati<br />
Il primo e sostanziale problema è stata la ricerca sul territorio dei punti e quindi la verifica<br />
dell’effettiva accessibilità ed esistenza.<br />
Per velocizzare la ricerca dei PF si sono inserite in un sensore <strong>GNSS</strong>, che ha funzionato come<br />
navigatore, le coordinate cartografiche <strong>catastali</strong> di monografia trasformate nel sistema UTM-<br />
WGS84-ETRF89 con CartLab 2.<br />
Per quanto riguarda l'accessibilità, molti punti sono risultati raggiungibili solo a piedi e interni a<br />
proprietà private, e conseguentemente sono stati scartati.<br />
Infine, alcuni punti non sono stati individuati in quanto distrutti o rimossi (è il caso di alcuni termini<br />
di proprietà).<br />
Complessivamente, con un impegno complessivo di due persone per 1 settimana e una percorrenza<br />
di circa 2500 km, sono stati visitati 50 punti. Di questi, 33 sono stati rilevati con successo e hanno<br />
fornito i dati sui quali si è basata la stima della trasformazione globale (Figura 4).<br />
117
118<br />
Figura 4 – PF effettivamente rilevati (in giallo, rosso, verde, bianco, blu)<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
Stima dei parametri di trasformazione<br />
Sono stati stimati dei parametri della trasformazione globale applicando i già menzionati algoritmi<br />
di Di Filippo, estesi in modo da poter confrontare diverse trasformazioni globali (rototraslazione<br />
piana con variazione di scala, affine generale)<br />
Come più volte ricordato, la stima della trasformazione si è basata sulla procedura proposta da Di<br />
Filippo, che richiede siano note le coordinate cartografiche <strong>catastali</strong> (nel nostro caso Cassini-<br />
Soldner) e le coordinate UTM-WGS84-ERTF89, entrambe trasformate su un piano di Gauss<br />
ausiliario. E' stato quindi implementato un foglio Excel contenente le formule di Di Filippo che<br />
gestiscono le trasformazioni <strong>delle</strong> coordinate di partenza sul piano di Gauss ausiliario e sono state<br />
inserite le doppie coordinate dei 33 PF considerati (Tabelle 3 e 4).
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
Allegato 2.2<br />
Trasformazioni globali per Coordinate dell'Origine Catastale<br />
Alberto Cina<br />
Politecnico di Torino – DITAG<br />
Introduzione<br />
La carta catastale Italiana si basa su sistemi di riferimento locali: le origini sono più di 800 e sono<br />
valide su estensioni di territorio variabili da pochi a oltre 100 km. L’incoerenza <strong>delle</strong> coordinate che<br />
ne derivano, pone problemi pratici in tutte quelle applicazioni nelle quali sia necessario lavorare in<br />
un unico sistema di riferimento, ad esempio nella “sovrapposizione” tra la carta catastale e quella<br />
tecnica regionale o in previsione di utilizzare coordinate RTK da <strong>reti</strong> di stazioni permanenti <strong>GNSS</strong>.<br />
È allora di pratica utilità la trasformazione da coordinate <strong>catastali</strong> Cassini-Soldner a coordinate di<br />
Gauss nelle realizzazioni Gauss-Boaga – Roma 1940 o UTM - WGS84. Un approccio basato<br />
sull’ignorare il diverso sistema di riferimento ed utilizzare una trasformazione piana di tipo<br />
conforme spesso non risulta consigliabile se non per zone limitate, a causa <strong>delle</strong> diverse<br />
deformazioni lineari e angolari che caratterizzano le due rappresentazioni cartografiche.<br />
Sebbene il problema sia stato dibattuto dagli anni ’40 ad oggi in eccellenti articoli, si ritiene utile<br />
portare un contributo ulteriore per un metodo geodetico di trasformazione che consenta di<br />
“riproiettare” i punti da un piano cartografico all’altro, passando prima alla superficie dei due<br />
ellissoidi, con errori trascurabili. Il metodo viene proposto con alcuni esempi pratici che consentono<br />
di valutare la bontà della trasformazione su punti <strong>catastali</strong> d’impianto rispetto alle coordinate IGM.<br />
La procedura è estensibile anche a carte vettoriali e raster con un software realizzato allo scopo<br />
dallo scrivente.<br />
Metodo geodetico di trasformazione da coordinate <strong>catastali</strong> a coordinate di Gauss<br />
Si propone una trasformazione basata su considerazioni <strong>geodetiche</strong>, a partire dalla conoscenza <strong>delle</strong><br />
sole origini <strong>catastali</strong>. Di quest’approccio ho cercato di dare una realizzazione pratica con lo<br />
sviluppo di un software che possa eseguire agevolmente la trasformazione.<br />
Affronterò il problema in due fasi:<br />
1) trasformazione dalle coordinate Cassini-Soldner alle coordinate di Gauss, nel DATUM originario<br />
della carta catastale;<br />
2) trasformazione dal DATUM originario Cassini-Soldner ad altro DATUM (Roma40 - ED50 -<br />
WGS84)<br />
1) La trasformazione <strong>delle</strong> coordinate: dalle coordinate Cassini-Soldner alle coordinate di Gauss<br />
È possibile eseguire il trasporto <strong>delle</strong> coordinate geografiche sull’ellissoide da O (0, 0) verso un<br />
punto P (P, P) noti sviluppo e azimut della geodetica OP (Inghilleri, 1974). È anche possibile<br />
eseguire questo trasporto a partire dalle coordinate cartografiche sul piano di Gauss, utilizzando<br />
sviluppo e azimut <strong>delle</strong> trasformate di <strong>geodetiche</strong>:<br />
119
120<br />
EP=EO + s’OP sin ’OP<br />
NP=NO + s’OP cos ’OP<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
Con s’OP e ’OP indichiamo rispettivamente la lunghezza della corda che sottende la trasformata di<br />
geodetica e l’angolo di direzione della corda stessa, riferito al nord del <strong>reti</strong>colato cartografico, che<br />
congiunge OP sul piano di Gauss.<br />
Sul piano Cassini-Soldner sono note o rilevabili graficamente le coordinate <strong>geodetiche</strong> rettangolari<br />
(y, x), trasformabili nelle corrispondenti <strong>geodetiche</strong> polari (s, ) (fig. 1). Gli elementi (s’, ’) sul<br />
piano di Gauss possono essere determinati portando i corrispondenti valori (s, ) Cassini-Soldner,<br />
sulla superficie di riferimento dell’ellissoide (sell, ell) e successivamente sul piano di Gauss (s’, ’),<br />
con l’applicazione <strong>delle</strong> classiche riduzioni cartografiche.<br />
Partiamo dagli angoli: l’azimut sull’ellissoide ell può essere dedotto dall’azimut della<br />
trasformata sulla carta Cassini-Soldner attraverso:<br />
ell = + OP (2)<br />
con OP deformazione angolare Cassini-Soldner. Osserviamo poi come il <strong>reti</strong>colato cartesiano (y, x)<br />
Cassini-Soldner sia disorientato rispetto a quello (N, E) della carta di Gauss, di un angolo pari alla<br />
convergenza della trasformata del meridiano in O (O). Occorre ancora considerare la correzione<br />
angolare alla corda OP per arrivare all’angolo di direzione della corda ’OP:<br />
’OP = ell + O - OP (3)<br />
con:<br />
2 2 2<br />
2 a c 2 <br />
O sin 1 cos 1 3 cos <br />
2 <br />
3 c <br />
NO NP 2X<br />
O X P <br />
OP<br />
<br />
2<br />
6 N 0.9996<br />
e X coordinate Est di Gauss depurate dalle false origini.<br />
Figura 1 – Coordinate <strong>geodetiche</strong> rettangolari e polari<br />
(1)<br />
(4)
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
Simile procedura adottiamo per la lunghezza <strong>delle</strong> <strong>geodetiche</strong>: portiamo la trasformata di geodetica<br />
dal piano Cassini-Soldner alla superficie dell’ellissoide, considerando il modulo di deformazione<br />
lineare mC.S. della rappresentazione in oggetto:<br />
s<br />
ell<br />
s<br />
<br />
m<br />
C. S<br />
Allo stesso modo proiettiamo la geodetica per gli stessi punti OP dall’ellissoide al piano di Gauss:<br />
la sua lunghezza s’ sarà:<br />
s ' sell m<br />
(6)<br />
Gauss<br />
Abbiamo ottenuto così la lunghezza della trasformata di geodetica sul piano di Gauss, ma è noto<br />
che essa può essere confusa senza apprezzabile errore, anche su estensioni di 100 km, con la<br />
lunghezza della corda che la sottende.<br />
Abbiamo ora a disposizione tutti gli elementi per l’applicazione <strong>delle</strong> formule (1). Se l’ellissoide<br />
utilizzato nelle due carte fosse il medesimo e mantenesse lo stesso orientamento, le coordinate così<br />
ottenute potrebbero già essere quelle nel sistema cartografico nazionale che si considera. In realtà si<br />
affronterà il problema della variazione di forma e di orientamento degli ellissoidi, al successivo<br />
paragrafo. Per ora detto procedimento ci porta alle coordinate di Gauss nel DATUM di partenza:<br />
esse non sono dunque coincidenti con le Gauss-Boaga o con le UTM, ma sono con esse congruenti.<br />
Chiamerò queste coordinate “UTM-Bessel” in quanto riferite ancora a questo ellissoide, nei suoi<br />
vari orientamenti. Affrontiamo ora la trasformazione di DATUM a partire però da sistemi di<br />
coordinate cartografiche fra loro congruenti.<br />
2) La trasformazione del DATUM: dall’ellissoide di Bessel orientato localmente ai DATUM<br />
Roma40 e WGS84<br />
La trasformazione di DATUM comporta per lo meno due problemi: la variazione della forma e la<br />
variazione di orientamento degli ellissoidi. Cominciamo a considerare le conseguenze che una<br />
variazione di forma ha sugli elementi geodetici fino ad ora considerati: cosa succede a questi se<br />
utilizziamo i parametri degli ellissoidi di Bessel, Hayford o WGS84?<br />
Si noti come le formule di Soldner riguardino grandezze che insistono sulla superficie<br />
dell’ellissoide e dunque poco dipendenti da piccole variazioni della sua forma: per confermare<br />
questa affermazione facciamo un esempio numerico. Consideriamo su una grande origine Soldner<br />
una geodetica uscente da un punto O di coordinate prossime all’estremità del fuso e in centro Italia<br />
( = 40° = 12° Est GW). La geodetica abbia lunghezza s = 100 km (valore limite nei sistemi<br />
<strong>catastali</strong> italiani) e azimut = 45°. Calcoliamo le coordinate <strong>geodetiche</strong> rettangolari (y, x), i valori<br />
di convergenza <strong>delle</strong> trasformate dei meridiani e l’eccesso sferico E sui tre ellissoidi, valutandone<br />
le differenze (tabella 1).<br />
(5)<br />
121
122<br />
differenze tra: x<br />
[mm]<br />
y<br />
[mm]<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
E [ “ ] [ “ ]<br />
Hayford - Bessel -0.9 0.4 -0.0013 0.0003<br />
WGS84 - Bessel -0.7 0.3 -0.0010 0.0001<br />
Tabella 1 – differenza tra gli elementi geodetici su tre ellissoidi<br />
Nel passaggio ai tre ellissoidi le variazioni <strong>delle</strong> coordinate Cassini-Soldner si mantengono inferiori<br />
a 1 mm e le variazioni degli elementi angolari E e dell’ordine di grandezza rispettivamente di<br />
millesimi e decimillesimi di secondo sessagesimale. Possiamo dunque affermare che elementi<br />
geodetici “superficiali” si mantengono praticamente inalterati nel cambio di ellissoide, a meno di<br />
errori inferiori a 1 mm / 100 km (10 -8 ), trascurabili anche per applicazioni di precisione. Un<br />
triangolo sull’ellissoide di Bessel rimane allora praticamente invariato sugli altri ellissoidi e<br />
possiamo quindi applicare la sequenza di calcolo esposta, avendo cura solo di calcolare i raggi di<br />
curvatura, le deformazioni cartografiche e tutti gli elementi geodetici con riferimento all’ellissoide<br />
al quale le grandezze sono effettivamente riferite.<br />
Più sensibile è il problema dell’orientamento. Abbiamo già detto come questo non sia stato il<br />
medesimo in tutte le parti d’Italia, prima dei riordini <strong>delle</strong> <strong>reti</strong> IGM. Nel caso catastale in esame è<br />
sufficiente determinare la rotazione tra DATUM nella sola componente che insiste sul piano<br />
cartografico. Il problema è di tipo geodetico e va affrontato stimando i parametri a partire da punti<br />
di “doppie coordinate” relativi ai due sistemi di riferimento. I parametri da stimare possono essere:<br />
sola rotazione sul piano cartografico ed eventualmente un fattore di scala ;<br />
rototraslazione con eventuale fattore di scala (Tx, Ty, , ) nel caso in cui si vogliano<br />
rideterminare o verificare le coordinate dell’origine in base ai valori <strong>delle</strong> traslazioni T.<br />
In tutti i casi i punti nei due sistemi di riferimento devono avere coordinate congruenti: non è<br />
corretto confrontare coordinate di Gauss con coordinate Cassini-Soldner a causa <strong>delle</strong> diverse<br />
deformazioni <strong>delle</strong> due rappresentazioni che vanno ad incidere sulla stima dei parametri. Nel<br />
seguito verranno confrontate coordinate nei due sistemi cartografici di Gauss sull’ellissoide di<br />
Bessel (chiamate precedentemente UTM-Bessel) con le Gauss-Boaga o UTM-WGS84. In questo<br />
caso ci si aspetta che i parametri stimati abbiano anche significato geometrico: le traslazioni Tx, Ty<br />
tendano a zero o possano portare al corretto valore dell’origine se questa è di posizione incognita, la<br />
rotazione sia effettivamente quella tra i due ellissoidi nella componente sul piano cartografico e la<br />
scala prossima a 1. Il fattore di scala può tenere conto <strong>delle</strong> differenze di altezze ellissoidiche<br />
riferite ai vari ellissoidi, se l’effetto non è già computato a priori. Ricordiamo infatti che la<br />
lunghezza s0 sulla superficie fisica viene ridotta alla superficie dell’ellissoide sell per il valore<br />
dell’altezza ellissoidica h in base alla:<br />
h <br />
sell s0<br />
1 <br />
R <br />
In ellissoidi localmente orientati (Hayford, Bessel) è plausibile avere ondulazioni del geoide N=h-H<br />
di pochi metri e dunque la quota ellissoidica può essere confusa con quella ortometrica H ai soli fini<br />
di questa riduzione. Ciò provoca un errore pari a <br />
1 N R<br />
: per N = 6.3 m esso è pari a 1 mm/km.<br />
Nell’ellissoide geocentrico WGS84 l’ondulazione del geoide in alcune zone del nord Italia può<br />
(7)
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
superare i 50 m: trascurare il suo effetto nella riduzione <strong>delle</strong> distanze provoca un errore di quasi 1<br />
cm/km. Sul piano di Gauss, s’ può essere allora espresso considerando la riduzione per la sola<br />
differenza fra le quote ortometriche ed ellissoidiche fra gli ellissoidi considerati. Ad esempio<br />
considerando l’ellissoide di Bessel e il WGS84:<br />
' ' N <br />
sWGS 84 sBessel<br />
1 <br />
R <br />
Il valore di N può essere ricavato, per questi fini, da un modello di geoide senza necessità di una<br />
elevata precisione.<br />
Si noti come la procedura proposta non richieda la conoscenza <strong>delle</strong> coordinate del punto origine O<br />
sull’ellissoide di Bessel, ma solo nel nuovo sistema di riferimento verso il quale si va ad eseguire la<br />
trasformazione. In alcuni casi però l’origine può essere incognita in quanto “punto ideale” che non<br />
ha una sua pratica materializzazione sul terreno oppure in quanto incerta e da verificare. Ciò non<br />
comporta particolari difficoltà seguendo la procedura di seguito esposta, applicata in forma<br />
iterativa, che possiamo chiamare:<br />
Metodo dell’origine fittizia<br />
Si parta allora da coordinate fittizie dell’origine incognita, anche ampiamente approssimate, e si<br />
calcolino così le coordinate UTM-Bessel di alcuni vertici trigonometrici noti in Cassini-Soldner,<br />
considerando nulla la variazione di orientamento dell’ellissoide. Otteniamo così le loro coordinate<br />
congruenti con UTM-WGS84 e Gauss-Boaga, ai fini di una prima stima dei parametri di<br />
rototraslazione.<br />
Avendo adottato un’origine fittizia anche molto distante da quella reale, ci aspettiamo che i valori<br />
<strong>delle</strong> deformazioni cartografiche e degli elementi geodetici e possano essere anche fortemente<br />
diversi da quelli che si sarebbero avuti partendo dall’origine reale. Le traslazioni sommate alle<br />
coordinate dell’origine fittizia possono però portare ad avere coordinate non troppo distanti da<br />
quelle incognite.<br />
Eseguiamo allora, dalle nuove coordinate dell’origine, una nuova trasformazione a coordinate<br />
UTM-Bessel che verranno confrontate nuovamente con le corrispondenti UTM-WGS84 o Gauss-<br />
Boaga. Nell’ipotesi di errori piccoli nelle coordinate dei punti doppi, la stima <strong>delle</strong> traslazioni<br />
dovrebbe portare rapidamente a valori prossimi a zero e il problema può essere risolto con poche<br />
iterazioni. Stimate così le coordinate dell’origine incognita possiamo applicare la procedura<br />
precedentemente esposta.<br />
Alcuni esempi<br />
Porterò alcuni esempi pratici di questa trasformazione, applicata alle piccole e grandi origini.<br />
1) Confronto fra coordinate Gauss-Boaga di alcuni vertici IGM con le corrispondenti derivate da<br />
quelle <strong>catastali</strong><br />
Nel Comune di Mortara sono note da dati storici <strong>catastali</strong> (dati forniti dai proff. Ambrogio e<br />
Giuseppe Manzino) le coordinate Cassini-Soldner di più di 60 vertici con le corrispondenti Gauss-<br />
Boaga. Il centro di emanazione è il vertice di 3° ordine corrispondente al campanile della chiesa di<br />
Mortara e di esso sono note le coordinate Gauss-Boaga e le false origini <strong>catastali</strong>. Esso è riportato<br />
(8)<br />
123
124<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
come un “cerchietto” verde in fig. 2. Alcuni dei 60 vertici sono anche IGM 3° e 4° ordine: è<br />
interessante notare come le coordinate fornite dal Catasto differiscano di pochi decimetri da quelle<br />
della monografia IGM, discrepanze dovute probabilmente all’uso di coordinate provvisorie o di<br />
rilevamenti e calcoli eseguiti in maniera autonoma dai due enti cartografici.<br />
Riportiamo in figura 3 gli scarti planimetrici fra coordinate Gauss-Boaga dei vertici e quelle<br />
derivate dalle <strong>catastali</strong> con il metodo geodetico proposto: essi non superano mai gli 80 cm e più<br />
frequentemente sono compresi entro i 60 cm. Gli scarti planimetrici risultano correlati alla distanza<br />
dall’origine con un indice di correlazione lineare R=74%: ciò potrebbe essere indicativo della<br />
propagazione dell’errore <strong>delle</strong> coordinate all’aumentare della distanza dal punto origine, più che<br />
della precisione con cui è eseguita la trasformazione. Ricordiamo infatti che i vertici in oggetto sono<br />
di raffittimento catastale o basso ordine IGM per i quali una precisione di 60 cm potrebbe essere<br />
verosimile. Confrontando le medie <strong>delle</strong> differenze nelle componenti est e nord con i loro sqm, esse<br />
non risultano significativamente diverse da zero: con valori di sqm <strong>delle</strong> differenze limitati a 16 cm<br />
e 26 cm rispettivamente nelle componenti est e nord risultano compatibili con la precisione della<br />
mappa catastale.<br />
Fig. 2 - vertici <strong>catastali</strong> in coordinate Gauss-Boaga –<br />
origine catastale di Mortara<br />
scarti planim . [m ]<br />
0,90<br />
0,80<br />
0,70<br />
0,60<br />
0,50<br />
0,40<br />
0,30<br />
0,20<br />
0,10<br />
0,00<br />
R = 0,74<br />
0,00 2,00 4,00 6,00 8,00 10,00 12,00<br />
distanza dall'origine [km]<br />
Differenze di coordinate (media e sqm):<br />
Est = -3 ± 16 cm<br />
Nord = -19 ± 26 cm<br />
Fig. 3 - scarti fra coordinate Gauss-Boaga di 60 vertici<br />
IGM e Cassini-Soldner, trasformate con metodo<br />
geodetico dall’origine di Mortara<br />
La stima dell’orientamento diventa tanto più importante quanto più i vertici sono distanti<br />
dall’origine: analizziamo allora il problema riferito a grandi origini Soldner.<br />
2) Cambio di DATUM sulle grandi origini di Siena (Toscana) e M. Pennino (Marche)<br />
La grande origine di Siena che si genera dal trigonometrico IGM di 2° ordine “Torre del Mangia”<br />
(cerchietto verde in fig. 4) è una <strong>delle</strong> più estese d’Italia. Nell’esempio seguente si considerano 8<br />
trigonometrici con distanze dall’origine che arrivano a superare i 100 km. Si vogliano stimare i<br />
parametri di orientamento tra ellissoidi a partire dalle coordinate Gauss-Boaga e Cassini-Soldner di<br />
detti vertici (desunte da Di Filippo, 1996). Applicando la procedura esposta, occorre prima di tutto<br />
arrivare a determinare le coordinate UTM-Bessel a partire dalle coordinate dell’origine nel sistema
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
Roma40 e dalle coordinate Cassini-Soldner. Queste possono poi essere utilizzate per eseguire la<br />
stima dei parametri di una trasformazione conforme tra il sistema di Gauss appena trovato e quello<br />
Gauss-Boaga. Analoghe considerazioni possono essere fatte sul DATUM WGS84 o altro sistema di<br />
riferimento.<br />
Fig. 4 - vertici <strong>catastali</strong> in coordinate Gauss-Boaga<br />
– origine catastale Siena<br />
Fig. 5 - vertici <strong>catastali</strong> in coordinate Gauss-Boaga –<br />
origine catastale M. Pennino (Marche)<br />
Si osservi come la stima dei parametri di rototraslazione (figura 6a) assuma valori ragionevoli:<br />
componente di rotazione sul piano di Gauss di circa 4”, fattore di scala di 2 ppm e traslazioni di<br />
pochi cm non significativamente diverse da zero, a conferma della bontà <strong>delle</strong> coordinate<br />
dell’origine e della elevata congruenza tra coordinate <strong>catastali</strong> e IGM. I parametri appaiono ben<br />
stimabili con scarti sugli 8 punti compresi per la quasi totalità in 20 cm per ogni componente.<br />
Stima parametri:<br />
= -4.17 ± 0.17 [“]<br />
= 2.3 ± 1.6 [ppm]<br />
Tx= -7.1 ± 5.6 [cm]<br />
Ty= - 8.8 ± 5.6 [cm]<br />
Fig. 6a - Scarti trasformazione tra coordinate UTM-<br />
Bessel e Gauss-Boaga – origine Siena<br />
Stima parametri:<br />
= -4°.17 ± 11“<br />
= 0.0 ± 105 [ppm]<br />
Tx= 1.69 ± 3.62 [m]<br />
Ty= 4.80 ± 3.62 [m]<br />
Fig. 6b Scarti trasformazione tra coordinate Cassini-<br />
Soldner e Gauss-Boaga – origine Siena<br />
125
126<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
Ma cosa succede stimando i parametri di una semplice rototraslazione conforme a partire dalle<br />
coordinate Cassini-Soldner e Gauss-Boaga? Ciò è ben rilevabile in figura 6b: i parametri assumono<br />
valori che non hanno più significato geometrico, includendo al loro interno deformazioni<br />
cartografiche non coerenti. Gli scarti sulle coordinate dei punti usati per la trasformazione possono<br />
arrivare anche a 20 m non certo imputabili alla qualità <strong>delle</strong> coordinate dedotte da Catasto e IGM,<br />
ma alle diverse caratteristiche <strong>delle</strong> rappresentazioni cartografiche.<br />
A conferma di ciò affrontiamo l’esempio <strong>delle</strong> Marche, con origine catastale sul trigonometrico di<br />
Monte Pennino (cerchietto verde in fig. 5). Consideriamo 7 vertici trigonometrici di coordinate note<br />
nei sistemi Gauss-Boaga e Cassini-Soldner, con una distanza dall’origine fino a 78 km. Le<br />
considerazioni esposte nel caso precedente possono essere estese completamente anche a questo<br />
caso. Passando a coordinate UTM-Bessel e stimando i parametri di una trasformazione conforme<br />
otteniamo parametri ben stimabili con scarti sulle coordinate dei punti contenuti entro 10 cm nella<br />
quasi totalità (fig. 7a). Essi diventano però anche di 10 m se si confrontano direttamente le<br />
coordinate Cassini-Soldner con le Gauss-Boaga (fig. 7b).<br />
Parametri:<br />
= -4.59 ± 0.11 [“]<br />
= 2.6 ± 1.1 [ppm]<br />
Tx= -4.2 ± 3.7 [cm]<br />
Ty= 23.3 ± 3.4 [cm]<br />
Fig. 7a - Scarti trasformazione coordinate UTM-<br />
Bessel e Gauss-Boaga – origine M.Pennino<br />
Parametri:<br />
= -4°.01 ± 9“<br />
= 0.0 ± 85 [ppm]<br />
Tx= 2.35 ± 2.83 [m]<br />
Ty= 4.77 ± 2.83 [m]<br />
3) Stima dei parametri su grandi estensioni e tipologie di stimatori<br />
Fig. 7b - Scarti trasformazione coordinate Cassini-<br />
Soldner e Gauss-Boaga – origine M.Pennino<br />
L’elevata congruenza tra le coordinate <strong>catastali</strong> e quelle di IGM di Gauss porta a indagare la<br />
possibilità di stimare la rotazione o la rototraslazione tra ellissoidi per zone ancora più estese. A<br />
partire dai dati usati nelle due precedenti regioni valutiamo la possibilità di stimare un unico set di<br />
parametri comuni. Il problema della diversità dei fusi cartografici può essere facilmente risolto<br />
considerando le coordinate geografiche in figura 8 proiettate su di un fuso ampliato.
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
Toscana<br />
Marche<br />
Fig. 8 - vertici <strong>catastali</strong> e IGM di Toscana e Marche in coordinate geografiche<br />
In questo caso, volendo stimare i parametri di una trasformazione conforme, pur transitando<br />
attraverso le coordinate UTM-Bessel i minimi quadrati forniscono parametri mal stimabili con<br />
scarti sulle coordinate dei vertici usati per la trasformazione anche superiori a 1,5 m (fig. 9a).<br />
Cambiando approccio di stima le cose possono però diventare più chiare. Utilizziamo allora<br />
stimatori robusti, ovvero capaci di fornire parametri poco deviati anche in presenza di numerosi<br />
errori grossolani. Senza entrare nel merito di un capitolo così ampio della statistica, limitiamoci alla<br />
sola stima robusta LMS (Least Median Square) che minimizza il quadrato degli scarti rispetto alla<br />
mediana di combinazioni di soluzioni. Esso funziona bene anche per una numerosità di errori<br />
grossolani che si avvicina al 50%.<br />
TOSCANA<br />
Fig. 9a - Scarti stima minimi quadrati Fig. 9b - Scarti stima LMS<br />
L’applicazione dello stimatore LMS al caso in esame ci porta a interessanti considerazioni. Dalla<br />
figura 9b, rispetto alla stima minimi quadrati, notiamo scarti di valore limitato nella componente Est<br />
e nella componente Nord per i primi 8 vertici situati in Toscana. I rimanenti vertici, nella Marche,<br />
presentano invece scarti sistematici di più di 2 m nella sola componente Nord. Osserviamo anche<br />
che la componente Nord è quella più variabile per piccole rotazioni, che lasciano quella Est<br />
praticamente inalterata. Possiamo allora comprendere che Marche e Toscana utilizzano un ellissoide<br />
di Bessel diversamente orientato!<br />
Pur non trattandosi di un errore grossolano sulle coordinate ma sulle ipotesi di base, le stime robuste<br />
possono essere una interessante alternativa ai minimi quadrati e i parametri stimati in questo caso<br />
Nord<br />
MARCHE<br />
Est<br />
127
128<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
sono quasi equivalenti a quelli stimati per la sola Toscana. Le stime robuste possono anche essere<br />
usate per un pretrattamento e una verifica <strong>delle</strong> coordinate di punti incerti da inserire in una<br />
successiva e più precisa stima minimi quadrati.<br />
Gli strumenti di calcolo<br />
Per rendere agevole la trasformazione così come è stata proposta, ho realizzato un software dal<br />
quale sono stati ricavati i risultati e i grafici presentati in questa nota e la cui interfaccia è presentata<br />
in figura 10. Esso è in grado di eseguire la trasformazione a partire dalle sole coordinate <strong>delle</strong><br />
origini <strong>catastali</strong> nel sistema di riferimento di arrivo (Roma 40 e WGS84): non sono necessarie tali<br />
coordinate sull’ellissoide di Bessel per le considerazioni precedentemente esposte. Viene richiesto il<br />
valore della rotazione tra gli ellissoidi, relativamente alla componente nel piano di Gauss: questa<br />
variabile può inizialmente essere considerata nulla e stimata con un software ausiliario (fig. 11) che<br />
permette la stima dei parametri di rotazione o rototraslazione a partire dalle coordinate UTM-<br />
Bessel. Il programma permette di applicare una stima minimi quadrati o robusta LMS e di risolvere<br />
il problema dell’origine incognita, a partire da coordinate fittizie.<br />
Il programma può convertire a coordinate di Gauss file di coordinate Cassini-Soldner in formato<br />
ASCII e può generare “coordinate doppie” Cassini-Soldner e Gauss di <strong>reti</strong>colati costruiti<br />
automaticamente specificando una “finestra” e noto il passo. Questa opzione risulta utile per<br />
georeferenziare mappe in formato raster, a partire dalle coordinate della parametratura. Ancora,<br />
vengono letti e convertiti in coordinate di Gauss file dei punti fiduciali in formato .TAF (tab. 2),<br />
come si trovano sul sito dell’Agenzia del Territorio (www.agenziaterritorio.it). In ultimo, sono<br />
convertibili files vettoriali in formato .DXF (fig. 12), mantenendone inalterata la struttura per livelli.<br />
A titolo di esempio, un grosso comune di 130 fogli di mappa in formato .DXF può essere convertito<br />
in coordinate di Gauss (Gauss-Boaga o UTM-WGS84) in poco più di 1 ora utilizzando un PC di<br />
prestazioni standard.<br />
Fig. 10 – software trasformazione da coordinate<br />
<strong>catastali</strong> a Gauss<br />
Fig. 11 – software per la stima dei parametri di<br />
rotazione tra ellissoidi e origine fittizia
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
016 1 1 2 TRIGONOMETRICO AGUILLE CHAMBEIRON 24001.130 7732.360<br />
A016 2 1 1 TRIGONOMETRICO COSTA DELLE MANZE 10742.670 22991.250<br />
A016 4 1 5 TRIGONOMETRICO B. GRAN SUBEYRAN 24678.930 12304.550<br />
A016 6 1 7 TRIGONOMETRICO MONTE MANIGLIA 27759.900 12718.700<br />
A016 7 1 1 TRIGONOMETRICO T.TA DELLE PIANE 26028.280 14473.770<br />
A016 7 2 4 TRIGONOMETRICO MONTE ALBRAGE 24961.890 14369.890<br />
……………………<br />
Tabella 4 – estratto di file di punti fiduciali .TAF con coordinate Cassini-Soldner (da www.agenziaterritorio.it)<br />
Fig. 12 – Stralcio di mappa Catastale formato DXF convertita in UTM-WGS84<br />
129
130<br />
Allegato 2.3<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
Ricerca automatica di punti omologhi tra le carte e trasformazione mediante<br />
funzioni spline multirisoluzione<br />
Maria A. Brovelli e G. Zamboni<br />
DIIAR, Politecnico di Milano<br />
L’individuazione <strong>delle</strong> corrispondenze sulle carte<br />
Il processo di integrazione cartografica è basato sull’utilizzo di corrispondenze tra il dato originale<br />
che si vuole trasformare e un dato assunto come riferimento.<br />
E' intuitivamente comprensibile che migliore è l'informazione che definisce il legame tra i due set di<br />
dati (definita in termini di quantità e precisione), migliore sarà la trasformazione finale ottenuta.<br />
Il primo passo è quindi quello di definire adeguatamente il legame tra due set di dati cartografici e<br />
progettare un metodo che permetta di rendere automatica l’individuazione <strong>delle</strong> corrispondenze.<br />
Indicando con c1 la carta che si desidera sovrapporre alla carta di riferimento c2, il primo passo per<br />
l’integrazione consiste nell’effettuare un pre-allineamento applicando una semplice trasformazione<br />
affine (rototraslazione con variazione anisotropa di scala e sbandamento) su c1: spesso infatti le<br />
carte hanno differente scala di rappresentazione ed orientamento.<br />
Per poter stimare ai minimi quadrati i 6 parametri della trasformazione affine generale sono<br />
sufficienti almeno quattro coppie di “punti omologhi”.<br />
Un punto P1 della carta c1 viene definito omologo di un punto P2 della carta c2 se la realtà<br />
geografica rappresentata graficamente dal punto P1 sulla carta c1 corrisponde alla realtà geografica<br />
rappresentata graficamente dal punto P2 sulla carta c2.<br />
Per definire la “realtà” descritta da un oggetto cartografico implicitamente svolgiamo una attività di<br />
riconoscimento della rappresentazione che si basa su un’analisi geometrica e su un’interpretazione<br />
semantica della geometria stessa.<br />
Risulta comunque evidente come la qualità della stima del vettore dei parametri dipenda, oltre che<br />
dalla precisione nella scelta dei punti, anche dal numero di associazioni definite sulle due carte.<br />
Per bassi valori del numero di punti, ad una variazione della loro scelta, possono corrispondere<br />
brusche oscillazioni dei valori dei parametri stimati, a dimostrazione del fatto che minore è la<br />
ridondanza dei dati disponibili, minore è il filtraggio del “noise” nel procedimento di stima ai<br />
minimi quadrati.<br />
Tali oscillazioni evidenziano anche come l'utilizzo di un numero limitato di punti omologhi renda<br />
molto sensibile la stima alla precisione con cui vengono scelti i punti (il singolo contributo è in<br />
grado di influenzare notevolmente la stima). Al crescere del numero di punti, i parametri stimati si<br />
stabilizzano a dei valori costanti con una progressiva diminuzione <strong>delle</strong> oscillazioni, indice di una<br />
minor sensibilità della stima al singolo contributo i-esimo e quindi all'ipotetica imprecisione nella<br />
sua scelta.<br />
Il dover inserire manualmente un elevato numero di punti omologhi ha come contropartita, oltre ai<br />
costi in termini di tempo, anche la dipendenza dell’individuazione dalla soggettività della scelta<br />
umana, sia in termini di numero e posizione dei punti selezionati che di in termini di precisione e<br />
correttezza <strong>delle</strong> associazioni.<br />
Per tali motivi è stato progettato un processo di ricerca dei punti omologhi tale da garantire sia un<br />
elevato numero di associazioni (al fine di ridurre l’instabilità della trasformazione) che la selezione<br />
automatica <strong>delle</strong> stesse (al fine di riduzione la soggettività della trasformazione).
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
L’algoritmo di ricerca automatica dei punti omologhi<br />
L’attività manuale di individuazione di coppie di punti omologhi è un processo basato su un’analisi<br />
visiva <strong>delle</strong> carte.<br />
E’ possibile esemplificare l’operazione di ricerca dei punti omologhi svolta manualmente da un<br />
operatore in tre passi: una analisi <strong>delle</strong> coordinate dei punti che geometricamente descrivono gli<br />
oggetti (posizione), una analisi della compatibilità <strong>delle</strong> “direzioni” dei segmenti uscenti dai punti<br />
stessi (forma) ed infine una analisi della compatibilità dell’informazione descritta dalla geometria<br />
(semantica).<br />
E’ stata quindi definita una metodologia in grado di effettuare la ricerca i punti omologhi in modo<br />
completamente automatico progettando un algoritmo tale da di riprodurre il più fedelmente<br />
possibile l‘analisi visiva svolta da un operatore umano.<br />
Controllo della posizione dei punti<br />
Ipotizzando di avere già definito (in genere manualmente) un numero limitato di coppie di punti<br />
omologhi indicati come “punti omologhi caposaldo”, siamo in grado di stimare ai minimi quadrati i<br />
parametri di una trasformazione affine generale e costruire una prima semplice sovrapposizione<br />
approssimata <strong>delle</strong> carte. Questa sovrapposizione “avvicina” i punti della carta c1 ai punti della<br />
carta c2 che risiedono nella stessa porzione di spazio. A questo punto, per “misurare” la probabilità<br />
che un punto P1 sulla carta c1 abbia come omologo il punto P2 sulla carta c2 è possibile utilizzare il<br />
concetto di distanza: tanto più due punti sono “vicini”, tanto più è probabile che tali punti siano<br />
omologhi.<br />
In termini operativi, il generico punto P2(k) appartenente alla carta c2 (k=1..N2; N2=numero di<br />
punti di c2) con minor distanza da P1(i) appartenente alla carta c1 (i=1..N1; N1=numero di punti di<br />
c1) può essere definito come suo punto omologo.<br />
Al fine di garantire una maggior precisione sulla scelta <strong>delle</strong> associazioni è stato inoltre introdotto<br />
un vincolo di “distanza massima (dMAX)” oltre la quale due punti non possono più essere<br />
considerati omologhi. Il valore numerico di “dMIN” deve dipendere dalla “qualità” <strong>delle</strong> due carte<br />
da sovrapporre, cioè dall’errore che può essersi accumulato durante i vari processi di produzione,<br />
digitalizzazione, georeferenziazione, ecc. Dato che questi errori non sono noti a priori (potrebbero<br />
eventualmente essere considerati gli errori di graficismo <strong>delle</strong> carte), è sensato fornirne un valore<br />
approssimato utilizzando la varianza<br />
trasformazione affine.<br />
σˆ<br />
2<br />
0<br />
della stima ai minimi quadrati dei parametri della<br />
2<br />
σˆ 0 , minore sarà la distorsione presente tra le due carte e quindi minore<br />
Minore è il valore di<br />
dovrebbe essere, sulla carta c1, l’intorno del generico punto P1(i) entro il quale ricercare il<br />
corrispondente omologo sulla carta c2. La scelta derivata dal teorema di Tchebycheff è quella di<br />
usare un intervallo quadrato centrato su P1(i) di lato 6 0 σˆ<br />
.<br />
Anche per quanto riguarda il calcolo della “prossimità” dei punti è stato utilizzato un approccio<br />
probabilistico introducendo un nuovo concetto di “distanza statistica” in cui la metrica risulti<br />
dipendente dalla precisione con cui è stata effettuata la stima della trasformazione. A tal fine il<br />
calcolo della distanza è quindi sostituito da un test statistico per stabilire se, fissata una generica<br />
coppia di punti P1 (su c1) e P2 (su c2) non appartenente al set di punti omologhi definiti a priori,<br />
essa risulta essere compatibile con il modello di trasformazione stimato e quindi possa essere<br />
considerata una nuova coppia di punti omologhi. Il vantaggio dell’approccio è quello di fornire,<br />
oltre alle nuove coppie di punti, anche un indice (espresso in termini di probabilità) sulla precisione<br />
e correttezza di ogni associazione individuata. Partendo dalle coordinate dei punti omologhi<br />
candidati e dal modello deterministico e stocastico dei minimi quadrati è possibile costruire una<br />
statistica F0 che possa essere comparata, fissato un livello di significatività , con il valore critico<br />
131
132<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
F di una distribuzione di Fisher a (2,n-m) gradi di libertà (indicando con n/2 il numero di punti<br />
omologhi e con m il numero di parametri stimati). Il test di accettazione dell’ipotesi H0 :{P1 è<br />
omologo di P2} può essere così formulato: se H0 è verificata allora F0 deve essere minore di F con<br />
probabilità (1-), altrimenti H0 è falsa.<br />
Inoltre, per garantire l’univocità <strong>delle</strong> associazioni, per ogni punto P1(i) di c1 e per tutti gli M punti<br />
P2(k) (k=1..M) di c2 che soddisfano contemporaneamente l’ipotesi H0, viene selezionata la coppia<br />
con F0 minore.<br />
In definitiva l’algoritmo di ricerca automatica dei punti omologhi è così formulato:<br />
Scansione di tutti i punti P1(i) della carta c1;<br />
Fissato P1(i) ricerca, tra tutti i punti appartenenti alla carta c2, del punto P2(k) che ha minor<br />
"distanza statistica" da P1(i) e tale che la distanza geometrica sia minore di dMIN;<br />
Se P2(k) non è già stato selezionato come omologo di un altro punto di c1 allora:<br />
definisci P1(i) come omologo di P2(k);<br />
altrimenti se P2(k) è già stato selezionato come omologo di altro un punto P1(h) di c1 e la<br />
distanza tra P1(i) e P2(k) è minore della distanza tra P1(h) e P2(k) allora:<br />
annulla la definizione di P1(h) come omologo di P2(k);<br />
definisci P1(i) come omologo di P2(k).<br />
Controllo degli “angoli azimutali”<br />
Per perfezionare l'algoritmo di ricerca è possibile utilizzare, oltre alle semplici coordinate spaziali<br />
dei punti, anche le informazioni derivate dal fatto di essere alla stesso tempo anche dei vertici di<br />
entità geometriche. Analizzando gli angoli dei segmenti uscenti da ciascun punto (vedi figura 1a) è<br />
possibile applicare un test geometrico in grado di verificare la “compatibilità angolare” di due<br />
candidati punti omologhi. Nella formulazione del test sono state definite <strong>delle</strong> regole di<br />
ammissibilità di carattere generale in grado di risolvere anche situazioni in cui, a causa della<br />
differente tipologia di rappresentazione cartografica, varia il numero di segmenti uscenti da ciascun<br />
punto (vedi per esempio i punti P1 e P2 in figura 1b).<br />
Y<br />
Y1<br />
P<br />
X1<br />
<br />
X<br />
(a) (b)<br />
Figura 1: Angolo “azimutale” (a) ed esempio di due punti omologhi P1 e P2 con differente numero di segmenti uscenti<br />
(b)<br />
Due punti sono considerati compatibili dal punto di vista "angolare" se le direzioni dei segmenti<br />
uscenti sono “simili” entro un certo angolo di tolleranza TOL. In figura 2 sono esemplificati due<br />
casi di compatibilità e di incompatibilità angolare di due punti P1 e P2.<br />
L'algoritmo di ricerca con controllo degli angoli azimutali è così formulato:<br />
Scansione di tutti i punti P1(i) della carta c1;<br />
Fissato P1(i) ricerca, tra tutti i punti appartenenti alla carta c2, del punto P2(k) con "angoli<br />
compatibili", che ha minor distanza statistica da P1(i) e tale che la distanza geometrica sia<br />
minore di dMIN;<br />
Se P2(k) non è già stato selezionato come omologo di un altro punto di c1 allora:<br />
definisci P1(i) come omologo di P2(k);
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
altrimenti se P2(k) è già stato selezionato come omologo di altro un punto P1(h) di c1 e la<br />
distanza tra P1(i) e P2(k) è minore della distanza tra P1(h) e P2(k) allora:<br />
annulla la definizione di P1(h) come omologo di P2(k);<br />
definisci P1(i) come omologo di P2(k).<br />
L’introduzione di questo controllo è in grado di eliminare la quasi totalità <strong>delle</strong> potenziali errate<br />
associazioni generabili dall'algoritmo ma non di risolvere una serie di casi in cui i punti, pur<br />
verificando la compatibilità geometrica, non risultano essere omologhi perché appartenenti a entità<br />
geometriche di differente contenuto informativo. In queste situazioni è possibile raffinare<br />
l’algoritmo di ricerca attivando il controllo semantico.<br />
Figura 2: Esempi di punti omologhi compatibili e non compatibili<br />
Controllo semantico<br />
Per introdurre questo ulteriore controllo si sfrutta una <strong>delle</strong> potenzialità della cartografia digitale che<br />
consiste nella possibilità di associare attributi descrittivi alle entità geometriche che la compongono.<br />
Un parallelogramma può rappresentare la perimetrazione di un edificio o la delimitazione di una<br />
particella catastale a seconda della codifica associata.<br />
Utilizzando differenti tipologie di carte, questi attributi possono essere incompatibili sia a livello di<br />
semplice denominazione che nel grado di dettaglio del contenuto: per questo motivo è necessario<br />
inizialmente definire una tabella di corrispondenze semantiche (vedi figura 3).<br />
Carta c1<br />
Figura 3: Associazioni tra gli attributi semantici di due differenti cartografie<br />
Carta c2<br />
Edificio<br />
Fabbricato<br />
residenziale<br />
Edificio<br />
Fabbricato<br />
commerciale<br />
Edificio<br />
Fabbricato<br />
accessorio<br />
Marciapiede /<br />
Recinzione legno Particella<br />
Recinzione Particella<br />
muratura<br />
Spartitraffico /<br />
L'algoritmo di ricerca con controllo degli angoli azimutali e controllo semantico è così formulato:<br />
Scansione di tutti i punti P1(i) della carta c1;<br />
Fissato P1(i) ricerca, tra tutti i punti appartenenti alla carta c2, del punto P2(k) con “codice<br />
compatibile”, con "angoli compatibili", che ha minor distanza statistica da P1(i) e tale che la<br />
distanza geometrica sia minore di dMIN;<br />
Se P2(k) non è già stato selezionato come omologo di un altro punto di c1 allora:<br />
definisci P1(i) come omologo di P2(k);<br />
altrimenti se P2(k) è già stato selezionato come omologo di altro un punto P1(h) di c1 e la<br />
distanza tra P1(i) e P2(k) è minore della distanza tra P1(h) e P2(k) allora:<br />
annulla la definizione di P1(h) come omologo di P2(k);<br />
definisci P1(i) come omologo di P2(k).<br />
133
134<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
Come è prevedibile aspettarsi, l’aggiunta del controllo semantico aumenta ulterioriemte<br />
l’affidabilità dell’algoritmo di ricerca automatica dei punti omologhi. Va comunque sottolineato<br />
come l’utilizzo di tale controllo richieda l’esistenza su entrambe le carte in esame di una codifica<br />
<strong>delle</strong> entità geometriche e la definizione di una opportuna tabella di corrispondenza tra codici, a<br />
differenza della ricerca geometrica con controllo sugli angoli che può essere applicata<br />
indistintamente su ogni tipo di cartografia numerica vettoriale.<br />
Raffinamento per iterazioni successive<br />
Una volta individuate automaticamente n nuove coppie di punti omologhi è possibile effettuare una<br />
nuova stima dei parametri della trasformazione affine utilizzando a questo punto le nuove n<br />
osservazioni. Disponendo di una stima più accurata si può riattivare il processo di ricerca<br />
automatica dei punti omologhi e iterare il tutto fino o alla convergenza del risultato o al verificarsi<br />
di una opportuna condizione di terminazione (variazione non più significativa della varianza<br />
stimata). Da risultati sperimentali è emerso come una semplice ricerca basata su controlli di<br />
coordinate sia in grado di fornire buoni risultati se la collocazione spaziale dei punti <strong>delle</strong> carte è<br />
tale da non risentire <strong>delle</strong> potenziali deformazioni presenti. Maggiore è la complessità <strong>delle</strong> carte<br />
(intesa come densità spaziale di informazioni) migliori sono le prestazioni ottenute introducendo<br />
controlli sugli angoli e controlli semantici.<br />
Interpolazione del campo di spostamento con spline multirisoluzione<br />
Indipendentemente dal metodo utilizzato per la ricerca dei punti omologhi (e quindi dal numero,<br />
dalla posizione e dalla precisione dei punti), la trasformazione affine generale stimata utilizzando<br />
tali osservazioni non è in grado di applicare deformazioni complesse (per esempio deformazioni<br />
localizzate) e quindi garantire, in generale, risultati di integrazione accettabili.<br />
Per ogni punto P1(i) della carta da trasformare è possibile definire un vettore di traslazione che<br />
indichi quale spostamento applicare a P1(i) affinché il nuovo punto P1'(i) così ottenuto si avvicini il<br />
più possibile al punto P2(k) omologo di P1(i) sulla carta di riferimento (vedi esempio di figura 4).<br />
Il problema della scelta della legge di trasformazione da applicare alla carta da deformare c1 può<br />
essere così reinterpretato come stima ottimale di un campo di spostamento definito come l'insieme<br />
dei vettori di traslazione che meglio adattano ciascun punto di c1 al corrispondente omologo sulla<br />
carta di riferimento c2. Per modellizzare andamenti complessi e disomogenei del campo si è scelto<br />
di costruire la funzione interpolatrice del campo come combinazione lineare di tante funzioni a<br />
supporto limitato (funzioni spline bidimensionali) tali che la loro stima non risenta dell’interferenza<br />
dei dati al di fuori del loro dominio di definizione.<br />
Figura 4: Esempio di entità trasformata (c) ottenuta applicando sulla geometria di partenza (a) un campo di<br />
spostamento (b)<br />
Implicitamente le coppie di punti omologhi individuati dall'algoritmo di ricerca automatica<br />
definiscono <strong>delle</strong> osservazioni dirette (vettori di traslazioni) del campo di spostamento da<br />
interpolare. Data la disomogeneità della distribuzione spaziale dei dati cartografici, un approccio
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
classico di interpolazione con spline a singola risoluzione collocate su un grigliato regolare ha come<br />
fase critica la scelta del passo di definizione della griglia: per piccolo si possono creare<br />
problemi di indeterminazione di alcune spline per assenza di dati all’interno del proprio dominio di<br />
definizione; per elevato si ottiene inevitabilmente una definizione del campo a bassa risoluzione.<br />
Per tale motivo è stata definita una originale teoria di interpolazione multirisoluzione combinando<br />
linearmente spline opportunamente scalate e localizzate nel piano. In questo modo si garantisce una<br />
risoluzione (e conseguente precisione) variabile a seconda della distribuzione spaziale <strong>delle</strong><br />
osservazioni tale da sfruttare in maniera ottimale tutti i contributi informativi sulle deformazioni<br />
locali contenuti nei punti omologhi (vedi figura 5).<br />
Punto di applicazione<br />
della spline<br />
Figura 5: Esempio di collocazione di spline: (1) a singola risoluzione; (2) multi-risoluzione<br />
Partendo da una definizione rigorosa del modello matematico nel caso monodimensionale, per<br />
semplice generalizzazione è stata derivata la corrispondente formulazione bidimensionale. A titolo<br />
esemplificativo, in figura 6 è mostrato l’andamento della funzione interpolatrice di un set di<br />
osservazioni monodimensionali ottenuta utilizzando spline a singola risoluzione (a) e spline multirisoluzione<br />
(b).<br />
Figura 6: Esempio di interpolazione con spline a singola risoluzione (a) e multi-risoluzione (b)<br />
Come si può notare, l’approccio multirisoluzione è in grado di generare una funzione interpolatrice<br />
a bassa risoluzione nell’intervallo in cui sono presenti osservazioni sparse e ad alta risoluzione<br />
nell’intervallo in cui il campo è maggiormente definito.<br />
In figura 7 è rappresento un esempio di distribuzione disomogenea (conseguente alla disomogeneità<br />
della distribuzione <strong>delle</strong> entità presenti nell’area in esame) di punti omologhi individuati<br />
dall’algoritmo di ricerca automatica (a), la corrispondente distribuzione dei punti di applicazione<br />
<strong>delle</strong> spline (b) e la distribuzione spaziale dei relativi domini, differenziati per tonalità di grigio C a<br />
135
136<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
seconda del livello L di appartenenza e quindi della risoluzione (c). Anche in questo caso la<br />
rappresentazione grafica mostra chiaramente come un approccio multirisoluzione permetta di<br />
ottenere una definizione più accurata del campo nelle zone con alta densità di punti (generalmente<br />
zone urbanizzate in cui è auspicabile una maggior precisione nel processo di sovrapposizione) con<br />
la garanzia comunque di una copertura totale dell’area da interpolare derivata dall’utilizzo di spline<br />
a bassa risoluzione nelle restanti zone.<br />
(a) (b) (c)<br />
Figura 7: Esempio di distribuzione spaziale di punti omologhi (a), <strong>delle</strong> spline multirisoluzione (b) e dei domini a<br />
differente livello L di risoluzione utilizzati per stimare il campo (c)<br />
La definizione di un modello stocastico nella formulazione della stima dei coefficienti <strong>delle</strong> spline<br />
ha reso possibile la costruzione di due ulteriori test statistici sia per la selezione automatica del<br />
numero N di livelli di differenti risoluzioni da utilizzare nell’interpolazione che per la crossvalidazione<br />
dei risultati ottenuti. In questo modo è stato realizzato un processo di modellazione<br />
automatica ed adattativa <strong>delle</strong> deformazioni e di verifica analitica della “robustezza” del modello<br />
stimato. L’intero processo di trasformazione cartografica è schematizzato in figura 8.<br />
L C<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
Carta c1<br />
trasformazione<br />
della carta c1<br />
individuazione<br />
manuale di n punti<br />
omologhi<br />
stima dei parametri<br />
della trasformazione<br />
affine<br />
Carta c1' Carta c1'<br />
N=N+1<br />
NO<br />
ANALISI MULTIRISOLUZIONE<br />
Carta c2<br />
Carta c2<br />
Ricerca automatica<br />
dei punti omologhi<br />
Convergenza<br />
punti<br />
SI<br />
Stima dei campi di<br />
spostamento per passare da c1<br />
a c2 con N livelli<br />
Convergenza<br />
stima<br />
Sovrapposizione<br />
approssimata<br />
(N=1)<br />
Aggiornamento punti<br />
omologhi di c1 e c2<br />
NO<br />
Figura 8: Schema generale del processo di integrazione automatica<br />
SI<br />
PROCESSO DI<br />
INTEGRAZIONE<br />
AUTOMATICA<br />
INTEGRAZIONE<br />
Carta c2<br />
Carta c1''<br />
Carta c1''<br />
trasformazione della<br />
carta c1 attraverso i<br />
campi di<br />
spostamento stimati<br />
137
138<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
Trasformazione cartografica su grandi aree<br />
Per dati cartografici con elevata estensione territoriale è possibile ottimizzare il processo di ricerca<br />
automatica dei punti omologhi e di stima del relativo campo di spostamento suddividendo l'area<br />
geografica in sottotavole ed applicando su ciascuna di esse gli algoritmi di integrazione<br />
opportunamente modificati al fine di garantire una coerente unificazione dei singoli risultati<br />
ottenuti.<br />
Consideriamo quindi due aree geografiche, corrispondenti tra di loro, a1 sulla carta c1 e a2 sulla<br />
carta c2. La suddivisione <strong>delle</strong> due aree geografiche a1 e a2 deve essere tale che la porzione di<br />
territorio contenuta nella tavola i-esima dell'area a1 corrisponda alla stessa porzione di territorio<br />
contenuta nella tavola i-esima dell'area a2.<br />
Per garantire questa corrispondenza, supponendo di voler deformare i dati contenuti nell'area<br />
geografica a1, attraverso una prima semplice trasformazione affine è possibile inquadrare a1<br />
all'interno della stessa cornice rettangolare di a2. Il risultato di questa primo adattamento rende<br />
possibile la successiva definizione di due griglie g1 e g2 tali che i dati cartografici contenuti nella<br />
cella di coordinate (riga-colonna) i,j di g1 siano riferiti alla stessa realtà territoriale descritta dai dati<br />
contenuti nella cella di coordinate i,j di g2.<br />
Per poter tenere conto della correlazione tra i dati di una tavola con quelli <strong>delle</strong> tavole confinanti in<br />
prossimità <strong>delle</strong> adiacenze è utile inserire nel processo di stima dei parametri della trasformazione<br />
locale anche una porzione di territorio limitrofo. A tale scopo vengono costruite due differenti<br />
cornici per ogni tavola: la cornice reale che corrisponde esattamente al perimetro della cella di<br />
coordinate (i,j) e la cornice estesa che si ottiene maggiorando di un fattore la dimensione della<br />
della cornice reale al fine di contenere, oltre ai dati della cella (i,j), anche una porzione di ciascuna<br />
tavola adiacente.<br />
Indicati con N e M rispettivamente il numero di celle orizzontali e verticali della griglia di<br />
suddivisione, dalle due aree a1 e a2 possiamo estrarre le NxM coppie di tavole t1(i,j) e t2(i,j)<br />
"contornate" con i dati <strong>delle</strong> tavole adiacenti, ed applicare localmente per ciascuna di esse il<br />
processo di ricerca automatica dei punti omologhi e di stima del campo di spostamento. Il risultato<br />
di tutto il processo è un insieme di NxM campi di spostamento c(i,j) stimati localmente per ciascuna<br />
coppia di tavole t1(i,j), t2(i,j).<br />
Il campo di spostamento globale si ottiene a questo punto integrando i contributi di tutti i singoli<br />
campi locali; per garantire la continuità del campo globale vengono inoltre mediati i valori dei<br />
singoli campi locali lungo le zone di sovrapposizione associando un peso maggiore a ciascun campo<br />
in prossimità della tavola sulla quale è stato stimato (peso unitario all’interno della tavola delimitata<br />
dalla cornice reale) e un peso minore in prossimità <strong>delle</strong> tavole adiacenti (peso nullo lungo il<br />
perimetro della cornice estesa).<br />
Al fine di rendere visivamente chiaro l’effetto di regolarizzazione ottenuto dalla procedura sopra<br />
descritta, in figura 9 è rappresentato il risultato dell’integrazione di quattro tavole (schematizzate da<br />
un griglia regolare) supponendo che i quattro campi di spostamento stimati localmente<br />
corrispondano a quattro semplici rotazioni.<br />
Figura 9: Esempio di 4 tavole trasformate applicando indipendentemente i campi di spostamento stimati localmente (a)<br />
e applicando il campo di spostamento globale regolarizzato (b)
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
Una volta costruito il campo di spostamento globale è possibile applicarlo direttamente su ogni<br />
porzione di dimensione arbitraria dell'area a1 ed ottenere così la trasformazione finale necessaria<br />
alla corretta sovrapposizione con l'area a2.<br />
L’utilizzo di un processo basato su una suddivisione dei dati in sottoaree garantisce una analisi<br />
ancora più accurata <strong>delle</strong> deformazioni nei casi in cui queste siano fortemente disomogenee grazie<br />
ad una più raffinata ricerca automatica dei punti omologhi e ad un conseguente miglioramento della<br />
stima del campo di spostamento e della deformazione finale applicata alla carta.<br />
In figura 10 è rappresentato lo schema generale per la definizione del campo di spostamento globale<br />
a partire dalla stima dei campi locali.<br />
Area geografica a1<br />
Campo di<br />
spostamento<br />
locale<br />
c(i,j)<br />
t1(i,j)<br />
Ricerca automatica dei punti<br />
omologhi locali<br />
Stima del campo di spostamento<br />
locale<br />
Regolarizzazione<br />
campi di<br />
spostamento<br />
t2(i,j)<br />
Figura 10: Processo di stima globale del campo di spostamento attraverso l’integrazione dei campo di spostamento<br />
stimati localmente<br />
Risultati sperimentali della ricerca automatica dei punti omologhi<br />
Area geografica a2<br />
Campo di spostamento globale<br />
139
140<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
A titolo esemplificativo si riportano i risultati della ricerca automatica dei punti omologhi eseguita<br />
utilizzando come dati la Carta Tecnica Regionale alla scala 1:5'000 e le mappe <strong>catastali</strong> alla scala<br />
1:1'000 dell’intero Comune di Modena per una superficie pari a 180 Km 2 c.a. Nella procedura è<br />
stato impostato come angolo di tolleranza per la compatibilità geometrica =15° e sono stati<br />
relazionati gli attributi semantici <strong>delle</strong> due carte come riassunto in tabella 1.<br />
Carta Catastale Acque_CXF Edifici_CXF Edifici_CXF Particelle_CXF Particelle_CXF<br />
C.T.R. ACQUE EDIFICI EDIFICI2 STRADE RECINZIONI<br />
Tabella 1: Tabella di associazione <strong>delle</strong> corrispondenze tra i differenti layer cartografici<br />
Per verificare le prestazioni dell’algoritmo sono state controllate manualmente le associazioni su<br />
due aree campione rappresentative. I casi in cui non è stato possibile validare con sicurezza le<br />
associazioni individuate sono stati conteggiati come “associazioni incerte”.<br />
Il primo controllo è stato effettuato su un’area di 7 Km 2 in cui sono stati rilevati 9’821 punti<br />
omologhi e di cui si riportano le statistiche in tabella 2.<br />
Punti omologhi Punti corretti (%) Punti incerti (%) Punti errati (%)<br />
9’821 9’398 (95,7) 273 (2,8) 150 (1,5)<br />
Tabella 2: Statistiche dei punti omologhi individuati dalla procedura di ricerca automatica tra cartografia catastale e<br />
C.T.R. su un'area di 7 Km 2<br />
In figura 11 è riportato un esempio di punti omologhi rilevati automaticamente dall'algoritmo.<br />
Figura 11: Punti omologhi individuati dall'algoritmo di ricerca automatica<br />
La maggior parte dei punti classificati come incerti sono stati individuati su tutte quelle entità che<br />
hanno un dettaglio di rappresentazione differente sulle due carte a causa della differente scala<br />
nominale. Infatti un punto di una entità rappresentata ad una certa scala può non avere un unico<br />
punto omologo ma piuttosto un insieme di più punti che dettagliano maggiormente la sua geometria<br />
se si considera una rappresentazione a scala maggiore (vedi esempio di figura 12).<br />
La maggior parte dei punti classificati come errati sono stati invece individuati su quelle entità che,<br />
pur insistendo sulla stessa porzione di territorio, hanno differenze geometriche significative (a<br />
seguito per esempio degli ampliamenti degli edificio non riportati sulla carta meno aggiornata).
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
Figura 12: Esempio di punto omologo “incerto” a causa del differente dettaglio cartografico<br />
Il secondo controllo è stato effettuato su un’area di 4 Km 2 in cui sono stati individuati 3'020 punti<br />
omologhi e di cui si riportano le statistiche in tabella 3.<br />
Per una analisi più approfondita della natura <strong>delle</strong> associazioni errate ed incerte, i punti sono stati<br />
inoltre classificati per attributi semantici. E’ possibile notare come il maggior numero di punti<br />
omologhi corretti appartengano ad entità con una ben definita geometria (edifici, fabbricati, …). Ciò<br />
è giustificato dal fatto che durante il processo di produzione cartografica, è più semplice per un<br />
operatore individuare in modo preciso i vertici di un artefatto piuttosto che di un letto di un fiume o<br />
di un ciglio di una strada. Questo spiega quindi anche l’elevato numero di punti errati o incerti<br />
nell’associazione “acque_cxf - acque”. Va comunque tenuto conto che la vicinanza di tali punti<br />
rende la distorsione introdotta dalla loro imprecisione nel processo di trasformazione cartografica<br />
generalmente inferiore all’errore cartografico associato alla carta con scala inferiore.<br />
Verifica manuale<br />
Carta catastale C.T.R.<br />
Punti Punti<br />
omologhi corretti<br />
(%)<br />
Punti<br />
errati<br />
(%)<br />
Punti<br />
incerti<br />
(%)<br />
Acque_CXF ACQUE 38 0 (0) 8 (21,1) 30 (78,9)<br />
Edifici_CXF EDIFICI 1’878 1’796 (95,6) 14 (0,7) 68 (3,6)<br />
Edifici_CXF EDIFICI2 462 457 (98,9) 5 (1,1) 0 (0)<br />
Particelle_CXF STRADE 83 75 (90,4) 5 (6,0) 3 (3,6)<br />
Particelle_CXF RECINZIONI 559 523 (93,6) 1 (0,2) 35 (6,3)<br />
Totale: 3’020 2’851 (94,4) 33 (1,1) 136 (4,5)<br />
Tabella 3: Statistiche dei punti omologhi individuati dalla procedura di ricerca automatica tra cartografia catastale e<br />
C.T.R. su un'area di 4 Km 2 classificati per attributi semantici<br />
Di fronte ad un elevato numero di punti individuati dall’algoritmo (nel caso dell’area di 7 Km 2 pari<br />
a circa 1'400 punti/km 2 ), è possibile migliorare le statistiche a scapito di un’accettabile riduzione<br />
<strong>delle</strong> associazioni.<br />
Ipotizzando non accettabili tutte le associazioni non compatibili con il massimo errore di graficismo<br />
ammisibile, sono state ricalcolate le statistiche escludendo tutti i punti omologhi con distanza<br />
(calcolata dopo l’applicazione della trasformazione affine) maggiore dell’errore di graficismo<br />
associato alla carta con scala minore (1 m alla scala 1:5’000). I risultati ottenuti sull’area di 7 Km 2<br />
sono riportati in tabella 4.<br />
Punti omologhi Punti corretti (%) Punti incerti (%) Punti errati (%)<br />
2’914 2’825 (97) 73 (2,5) 16 (0,5)<br />
Tabella 4: Statistiche dei punti omologhi con distanza minore dell'errore di graficismo individuati dalla ricerca<br />
automatica tra cartografia catastale e C.T.R. su un'area di 7 Km 2<br />
141
142<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
Si può notare come la scelta di una soglia sulle distanze tra punti produca una riduzione del 67% del<br />
numero di punti errati (dall’1,5% allo 0,5%) e solo una lieve riduzione del numero di punti incerti<br />
(dal 2,8% al 2,5%).<br />
Dall’analisi dei risultati ottenuti si può sostenere che l’affidabilità dell’algoritmo di ricerca<br />
automatica dei punti omologhi è più che soddisfacente, dal momento che percentuali di errori<br />
dell’ordine dell’1,5% (o addirittura dello 0,5%), con un numero così elevato di punti sono<br />
difficilmente raggiungibili anche da un operatore esperto che operi in condizioni standard di<br />
produzione. Sappiamo che all’aumentare del numero di punti omologhi aumenta l’accuratezza della<br />
deformazione e quindi la carta da trasformare meglio si adatta a quella di riferimento. D’altro canto<br />
l’introduzione di punti omologhi errati introduce deformazioni errate. Per contenere questo effetto e<br />
al tempo stesso conservare un numero sufficientemente elevato di punti omologhi, può essere<br />
applicato con successo, come dimostrato dai test eseguiti, un filtro sui punti omologhi individuati<br />
che tenga conto dell’errore di graficismo e quindi, letto in altro modo, della scala <strong>delle</strong> carte da<br />
deformare.<br />
Prestazioni dell’algoritmo di stima del campo di spostamento<br />
Per valutare le prestazioni dell’algoritmo di interpolazione del campo di spostamento è stata<br />
effettuata una cross-validazione dei risultati ottenuti sia sul campione di 7 Km 2 che sull’interno<br />
territorio di Modena. In entrambi i casi la totalità dei punti omologhi individuati è stata suddivisa in<br />
due sottoinsiemi: l’insieme dei punti utilizzati per stimare il campo di spostamento (80% circa) e<br />
l’insieme dei punti utilizzati per validare il risultato (20% restante) attraverso un confronto diretto<br />
della distanza di questi ultimi prima e dopo l’applicazione del campo di spostamento.<br />
Per quanto riguarda l’area campione di 7 Km 2 sono stati utilizzati i 2’914 punti omologhi<br />
individuati, come visto in precedenza, limitando la distanza massima all’errore di graficismo.<br />
In particolare 2’325 punti sono stati utilizzati per stimare il campo di spostamento e i 589 restanti<br />
(punti di controllo) per cross-validare i risultati.<br />
Per confermare la migliore attendibilità di tali punti rispetto ai 9’821 totali è stato inoltre ristimato il<br />
campo utilizzando questi ultimi (sempre con l’esclusione dei 589 punti di test) e sono stati<br />
confrontati i due differenti risultati.<br />
In tabella 5 si riportano la media e lo scarto quadratico medio della distanza dei punti omologhi di<br />
controllo prima e dopo l’applicazione dei due campi di spostamento.<br />
Distanza dei<br />
punti omologhi<br />
Osservazioni per la<br />
stima<br />
Media (m) S.q.m. (m)<br />
Prima della trasformazione / 0,789 0,467<br />
Dopo la trasformazione 9’232 0,663 0,402<br />
Dopo la trasformazione 2’325 0,490 0,281<br />
Tabella 5: Prestazioni dell’algoritmo di interpolazione su un’area campione di 7 Km 2 (statistiche calcolate sui punti di<br />
controllo)<br />
Si riportano di seguito due esempi del risultato della trasformazione della carta catastale<br />
sovrapposta alla Carta Tecnica Regionale utilizzando le spline multirisoluzione al fine di verificare<br />
le differenze rispetto a quanto ottenuto utilizzando una semplice trasformazione affine generale<br />
(vedi figura 13).
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
(a)<br />
Figura 13: Esempi di sovrapposizione della carta catastale con la Carta Tecnica Regionale applicando una<br />
trasformazione affine (a) e la trasformazione a spline multirisoluzione (b)<br />
Per quanto riguarda la verifica sull’intero territorio di Modena, la quantità dei dati da elaborare ha<br />
reso preferibile l’utilizzo del processo di trasformazione progettato per operare su grandi aree.<br />
Analogamente a quanto fatto per l’area campione, dei 139’419 punti omologhi individuati<br />
sull’intero territorio (somma dei singoli contributi di ciascun processo di ricerca locale), 117'174<br />
sono stati utilizzati per stimare il campo di spostamento (ottenuto per integrazione dei campi di<br />
spostamento stimati localmente) mentre i restanti 22’245 come punti di controllo per validare il<br />
risultato.<br />
La tabella 6 di seguito riportata riassume media e varianza <strong>delle</strong> distanze dei punti omologhi di<br />
controllo prima e dopo la trasformazione cartografica.<br />
Distanza dei<br />
punti omologhi<br />
Osservazioni per la<br />
stima<br />
Media (m) S.q.m. (m)<br />
Prima della trasformazione / 2,321 1,573<br />
Dopo la trasformazione 117'174 0,993 0,872<br />
Tabella 6: Prestazioni dell’algoritmo di interpolazione sull'interno territorio di Modena (statistiche calcolate sui punti di<br />
controllo)<br />
(b)<br />
143
144<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
Si può notare come la media della distanza dei punti omologhi diminuisca del 57% mentre lo scarto<br />
quadratico medio del 45%. Da rilevare inoltre come la distanza media dei punti dopo la<br />
trasformazione diventi inferiore all’errore di graficismo ammissibile per la carta meno dettagliata.<br />
Conclusioni sulle verifiche sperimentali<br />
Le verifiche sperimentali sono state condotte su dati cartografici reali (base catastale e Carta<br />
Tecnica Regionale del Comune di Modena) di estensione territoriale e complessità strutturale tali da<br />
essere considerati un campione rappresentativo <strong>delle</strong> più diffuse carte numeriche (dalla scala 1:500<br />
alla scala 1:5000). Per quanto riguarda le prestazioni dell’algoritmo di interpolazione con spline<br />
multirisoluzione si può concludere che i risultati sono pienamente soddisfacenti tenuto conto che,<br />
anche nel peggiore dei casi, cioè considerando indistintamente tutti gli omologhi individuati<br />
dall'algoritmo di ricerca automatica, la distanza media dei punti al termine della trasformazione<br />
risulta inferiore o uguale all’errore di graficismo della carta a scala minore.
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
Allegato 2.4<br />
Ricomposizione Procustiana della Rete Fiduciale e della Cartografia Catastale<br />
Numerica <br />
Alberto Beinat, Fabio Crosilla, Emiliano Sossai<br />
Università di Udine, Laboratorio di Geomatica Computazionale - interreg.cart@uniud.it<br />
KEY WORDS: Cartografia catastale, ricomposizione, punti fiduciali, PREGEO<br />
RIASSUNTO<br />
In questi ultimi anni, il gruppo di ricerca 2 dell’Università di Udine ha sviluppato una procedura originale e innovativa per la<br />
ricomposizione globale della rete dei Punti Fiduciali del catasto. Tale metodo, basato sulle tecniche dell’analisi procustiana<br />
generalizzata, si prefigge di effettuare il miglior adattamento conforme ai minimi quadrati dei vari poligoni fiduciali ricostruiti sulla<br />
base degli elaborati tecnici inseriti in PREGEO.<br />
L’idea distintiva è utilizzare per la compensazione della rete non già le singole distanze tra PF, valutate in maniera disgiunta l’una<br />
dall’altra, bensì ogni singolo rilievo nella propria interezza, considerato come entità geometrica non disaggregabile, con vertici<br />
interconnessi tra di loro da legami rigidi.<br />
La soluzione proposta ha due importanti conseguenze: innanzi tutto, permette di individuare, stimare e risolvere gli eventuali<br />
sistematismi presenti nei dati di partenza; inoltre, preservando la forma dei poligoni fiduciali compensati, evita l’insorgenza di<br />
deformazioni anisotrope nel tessuto cartografico e mantiene inalterate le mutue relazioni tra i PF e i rilievi di aggiornamento ad essi<br />
appoggiati. Tali considerazioni hanno trovato pieno riscontro nella sperimentazione svolta. Dopo una fase iniziale eseguita in<br />
ambiente simulato, le prove hanno riguardato due <strong>reti</strong> reali situate nei comuni di Udine (zona Udine Nord: 68 PF e 3.8 Km 2 di<br />
estensione), Gorizia (zone censuarie A e G: 59 PF e 2.6 Km 2 ) e Tarcento (UD) (205 PF e 20 Km 2 ). Il confronto tra i risultati ottenuti<br />
dalla ricomposizione conforme e i dati relativi a <strong>reti</strong> di Punti Fiduciali di controllo appositamente istituite, ha permesso di constatare<br />
l’ottimo rispetto <strong>delle</strong> tolleranze vigenti già a partire da una compensazione vincolata a un numero di PF fissi pari al 10-15% del<br />
totale. Altre verifiche hanno evidenziato inoltre come il metodo procustiano riesca, a differenza del metodo di compensazione<br />
classico, a ridurre gli effetti di componenti sistematiche d’errore eventualmente presenti nelle misure.<br />
Gli esiti della sperimentazione hanno permesso di consolidare il metodo in funzione della fase successiva, ovvero la ricomposizione<br />
cartografica numerica <strong>delle</strong> particelle. Nel presente lavoro sono illustrati i primi risultati in questa direzione, ossia l’inserimento,<br />
mediante trasformazione conforme ai minimi quadrati, dei rilievi PREGEO all’interno <strong>delle</strong> <strong>reti</strong> fiduciali compensate .<br />
Per testare la bontà dell’operazione, è stata eseguita una doppia serie di indagini: nella prima si sono valutate le effettive discrepanze,<br />
in termini di coordinate, tra punti omologhi di rilievi adiacenti; successivamente, mediante sovrapposizione, si sono confrontati i<br />
contenuti della mappa catastale parziale così ricostruita con quelli della carta tecnica numerica del Friuli Venezia Giulia. Nel primo<br />
caso, le differenze riscontrate sono risultate estremamente contenute; nel secondo, è stata confermata e messa in risalto la notevole<br />
congruenza ottenibile tra i due prodotti cartografici a seguito della ricomposizione dei rilievi <strong>catastali</strong>.<br />
Ulteriori miglioramenti sono stati permessi dall’attuazione di una procedura di ricomposizione che considera simultaneamente i<br />
poligoni fiduciali ed i punti omologhi appartenenti a rilievi <strong>catastali</strong> adiacenti tra loro.<br />
1. INTRODUZIONE<br />
La questione relativa alla ricomposizione della cartografia catastale trae le premesse da due atti normativi specifici, la Circolare<br />
Ministeriale n. 2 del 15/01/87 e la Circolare Ministeriale n. 2 del 26/02/88, strettamente collegate, con le quali viene dato avvio a un<br />
sistema informatizzato per l’archiviazione <strong>delle</strong> misure topografiche <strong>catastali</strong> (PREGEO), e si prescrive che, per l’esecuzione dei<br />
rilievi di aggiornamento in campagna, il tecnico incaricato debba appoggiarsi ad almeno tre punti di una rete di punti fiduciali<br />
appositamente costituita (triangolo o poligono fiduciale). Con lungimiranza, queste norme hanno dato avvio a un processo di<br />
aggiornamento e di possibile rinnovamento della cartografia catastale, basato sul lavoro qualificato dei professionisti.<br />
Grazie alle procedure introdotte, ogni atto di aggiornamento depositato nel sistema informativo Pregeo, relativo a un rilievo diretto in<br />
campagna, può essere considerato come una tessera del mosaico cartografico catastale generale. Ognuna di queste “tessere” detiene<br />
un importante valore metrico e giuridico, dato che convalida o aggiorna le geometrie reali <strong>delle</strong> proprietà, secondo quanto certificato<br />
da un professionista.<br />
In questi anni, l’Agenzia del Territorio ha accumulato un ingente patrimonio di dati di notevole valenza topo-cartografica. Già nel<br />
2005, a livello nazionale, l’archivio annoverava oltre 650 mila punti fiduciali toccati direttamente da almeno un rilievo, collegati tra<br />
loro da oltre 16 milioni di misure di distanza. La distribuzione geografica <strong>delle</strong> misure è ancora in parte disomogenea e la massima<br />
densità si riscontra, comprensibilmente, in corrispondenza <strong>delle</strong> aree urbanizzate. Un’indagine svolta dagli autori (Beinat, Crosilla e<br />
La presente memoria è una integrazione dell’articolo “Ricomposizione particellare conforme della cartografia<br />
catastale numerica”, presentato al Convegno Nazionale SIFET di Mondello (Palermo), 29/06/2005-01/07/2005.<br />
2 La ricerca è stata condotta principalemente nell'ambito <strong>delle</strong> attività previste dal progetto INTERREG IIIA Phare/CBC Italia-<br />
Slovenia "Ricomposizione della cartografia catastale e integrazione della cartografia tecnica regionale numerica per i sistemi<br />
informativi territoriali degli enti locali mediante sperimentazione di nuove tecnologie di rilevamento" svolto dall'Università di Udine<br />
in collaborazione con il Geodetski Inštitut Slovenije di Lubiana<br />
145
146<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
Sossai, 2004), sulla situazione in Friuli Venezia Giulia, rileva che in 9 comuni su 10, il numero dei punti fiduciali interessati da<br />
rilievi supera o eguaglia il 70 per cento del totale. Vi sono quindi le premesse, sebbene riferite ad ambiti territoriali definiti, per<br />
impiegare vantaggiosamente le informazioni geometriche memorizzate in PREGEO, per impostare ed avviare il rinnovamento della<br />
cartografia catastale a livello locale o regionale.<br />
La ricomposizione generale della cartografia catastale costituisce infatti la possibile soluzione di problemi aperti. Si va dalla scarsa<br />
accuratezza e affidabilità <strong>delle</strong> coordinate attuali dei Punti Fiduciali, ridefinite nel corso del tempo dalle nuove misure dei<br />
professionisti; alla difficile integrazione <strong>delle</strong> nuove entità <strong>catastali</strong>, notevolmente precise grazie alla moderna strumentazione<br />
topografica, nella cartografia d’impianto digitalizzata, dalla necessità per molti amministrazioni comunali di disporre del<br />
“continuum” cartografico catastale, alla realizzazione di una carta catastale congruente con altri prodotti, come le Carte Tecniche<br />
Regionali.<br />
Per l’aggiornamento della cartografia numerica catastale il gruppo di ricerca dell’Università di Udine ha proposto e sperimentato un<br />
metodo analitico di compensazione della rete dei punti fiduciali basato su tecniche di Analisi Procustiana (Beinat e Crosilla, 2003;<br />
Beinat, Clerici e Crosilla, 2002), algoritmi matematici già impiegati nella statistica, nella psicometria e nell’analisi <strong>delle</strong> forme<br />
(Dryden e Mardia, 1998).<br />
L’obiettivo della procedura è quello di definire coordinate accurate e stabili per l’insieme dei punti fiduciali, e di fornire un datum<br />
preciso per le successive necessità cartografiche, mediante una metodologia rigorosa ed appropriata, che utilizzi dati già disponibili,<br />
limitando al massimo il ricorso alla misura diretta ex-novo di tutti i P.F., come a volte proposto. Considerando che i P.F. a livello<br />
nazionale sono quasi 1600000, i vantaggi per l’economia e la riduzione dei tempi di realizzazione sono evidenti.<br />
Il presente lavoro è suddiviso in tre parti. La prima riassume, molto brevemente, le caratteristiche del metodo procustiano di<br />
ricomposizione <strong>delle</strong> <strong>reti</strong> di Punti Fiduciali e i risultati ottenuti dalle sperimentazioni sin qui svolte. Nella seconda si va a descrivere,<br />
nel dettaglio, la fase successiva, nella quale avviene l’inserimento dei rilievi PREGEO all’interno della rete di P.F. ricomposta e<br />
iniziano a delinearsi le prime parti della cartografia catastale ricomposta. La terza mostra come sia possibile utilizzare la carta<br />
catastale parziale così prodotta per georeferenziare nel sistema UTM/ETRS89 le mappe attuali e porre le basi per la realizzazione del<br />
continuum cartografico catastale. Nella quarta si propone di realizzare una Carta Tecnica Catastale, come strumento in grado di<br />
fornire il collegamento funzionale, nei SIT degli Enti Locali, tra le Carte Tecniche e la Carta Catastale, ovviando al problema della<br />
diversa precisione, dei vincoli “probatori” e del diverso tematismo.<br />
2. PARTE PRIMA: LA RICOMPOSIZIONE DELLA RETE FIDUCIALE CON METODOLOGIA<br />
PROCUSTIANA<br />
La procedura procustiana per la ricomposizione <strong>delle</strong> <strong>reti</strong> di Punti Fiduciali può essere riassunta nelle seguenti quattro fasi:<br />
Acquisizione <strong>delle</strong> informazioni relative ai punti fiduciali e <strong>delle</strong> mutue distanze;<br />
Costruzione della rete fiduciale approssimata;<br />
Compensazione procustiana;<br />
Analisi e validazione dei risultati ottenuti.<br />
Per quanto riguarda il primo punto, le informazioni necessarie alla procedura sono essenzialmente l’insieme dei poligoni fiduciali<br />
afferenti alla rete da compensare: essi sono ricostruiti in maniera automatica a partire dai file .TAF e .DIS messi a disposizione in rete<br />
dall’Agenzia del Territorio.<br />
All’elenco dei dati di partenza si aggiungono le posizioni di alcuni vertici della rete, destinati a vincolare la compensazione (punti<br />
fissi) e a fornire termini di confronto per la validazione dei risultati (punti di controllo). Le coordinate di questi punti sono<br />
determinate direttamente mediante una apposita campagna di misure svolta preferibilmente con l’impiego di tecniche satellitari.<br />
Nello stadio successivo, i vari poligoni fiduciali ricostruiti vengono ricondotti in maniera automatica ad un unico sistema di<br />
riferimento iniziale. Questo può avvenire secondo due metodi: o mediante concatenamento successivo dei vari poligoni tra di loro, o<br />
con georeferenziazione diretta tramite le coordinate locali (Cassini-Soldner) presenti nella TAF. Questa fase si conclude con il<br />
successivo inquadramento dei poligoni fiduciali, già ricondotti ad un datum unico, nel sistema di riferimento dei punti fissi attraverso<br />
l’applicazione di una trasformazione di similitudine ai minimi quadrati.<br />
La fase di compensazione si realizza adattando, in ambito topografico, quel metodo noto in letteratura col nome di “Analisi<br />
Procustiana Generalizzata a dati mancanti” (Commandeur, 1991; Beinat e Crosilla, 2002). Esso consiste nella determinazione della<br />
forma più probabile di una configurazione di punti (la rete complessiva dei Punti Fiduciali) attraverso un ciclo di successive<br />
trasformazioni di similitudine ai minimi quadrati, applicate a tutte le sotto-configurazioni disponibili (i vari poligoni fiduciali); tale<br />
ciclo viene iterato fino a quando il mutuo adattamento di queste non soddisfa una predefinita condizione di minimo. La procedura in<br />
questione, dal punto di vista analitico, è equivalente a una Triangolazione Aerea a Modelli Indipendenti, nella quale al posto dei<br />
modelli fotogrammetrici si considerano i vari poligoni fiduciali 2D o 3D (Crosilla e Beinat, 2002).<br />
La verifica conclusiva si compie con il confronto <strong>delle</strong> coordinate ottenute dal processo di compensazione e le omologhe presenti<br />
nella rete dei punti di controllo. Il risultato finale è una rete di Punti Fiduciali inquadrata direttamente nel datum definito dall’insieme<br />
dei PF fissi, preferibilmente UTM/ETRS89.<br />
Il metodo qui brevemente descritto ha trovato applicazione, prima nella risoluzione di casi simulati, successivamente è stato<br />
impiegato nella ricomposizione di tre <strong>reti</strong> reali, situate nei comuni di Udine (Beinat e Crosilla, 2002; Beinat, Clerici e Crosilla ; 2003)<br />
Gorizia (Beinat, Crosilla, Furlan e Sossai, 2004), e Tarcento (UD) (Sossai, 2005) composte da 56, 59, 205 Punti Fiduciali distribuiti<br />
su un’estensione di 2.8, 2.6 e 20 km2 rispettivamente.<br />
La ricomposizione procustiana di una rete simulata, variamente deformata, ha consentito di verificare la capacità del processo di<br />
recuperare sia gli errori di tipo accidentale che sistematico. Il confronto con i risultati ottenuti sulla stessa rete dalla compensazione<br />
classica ai minimi quadrati, ha evidenziato una sostanziale equivalenza tra i due metodi qualora la natura dell’errore sia solo di tipo<br />
casuale, e una superiorità dell’algoritmo procustiano proporzionale al prevalere della componente sistematica di errore rispetto a<br />
quella accidentale.<br />
Tali risultati hanno trovato conferma nell’esperienza di Udine (rete “Udine Nord”). Realizzata sovrapponendo 205 poligoni fiduciali,<br />
vincolata con 9 punti fissi e analizzata su 9 punti di controllo, la compensazione procustiana si è rilevata migliore della tecnica
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
tradizionale sia in termini di precisione che di accuratezza. Questo è soprattutto conseguenza della possibilità di adattare mutuamente<br />
i vari poligoni fiduciali, attraverso l’applicazione di un fattore di scala residuo specifico per ognuno di questi.<br />
La sperimentazione è proseguita nel comune di Gorizia (rete situata nelle zone censuarie A e G), area in cui vige il sistema tavolate. I<br />
dati di ingresso riguardavano 164 poligoni fiduciali, 8 PF fissi e 17 di controllo. Per evidenziare l’efficacia del metodo si è proceduto<br />
ad un confronto tra le condizioni della rete prima (TAF) e dopo la compensazione. Con riferimento alla rete di controllo, si è<br />
manifestata una riduzione degli errori di circa un ordine di grandezza, dimostrando anche in questo caso la validità della procedura.<br />
E’ stata quindi estesa l’esperienza di Udine (rete di Udine Nord), portando a 369 e a 68, rispettivamente, il numero dei Poligoni e dei<br />
Punti Fiduciali compensati su un’area complessiva di 3.8 km2, ed incrementando di un’unità il numero dei punti fissi. L’ultimo<br />
esperimento ha interessato una area più vasta (20 km2) estesa al Comune di Tarcento (UD) e ha richiesto l’elaborazione di 1166<br />
poligoni colleganti 205 PF di cui 29 assunti come fissi.<br />
3. PARTE SECONDA: LA RETE DEI PUNTI FIDUCIALI E I RILIEVI PREGEO<br />
Tra gli scopi della rete dei Punti Fiduciali vi è quello di consentire l’inserimento diretto dei rilievi PREGEO, ricostruiti dagli<br />
elaborati tecnici dei professionisti, all’interno della carta catastale e realizzare il conseguente aggiornamento di quest’ultima. Nel<br />
“metodo procustiano”, l’inserimento <strong>delle</strong> geometrie del libretto PREGEO nella rete fiduciale ricomposta avviene automaticamente,<br />
senza deformazione, mediante una trasformazione di similitudine locale determinata sulla base <strong>delle</strong> doppie coordinate dei PF<br />
interessati. Al riguardo, il fattore di scala della trasformazione di similitudine, nel caso si discosti significativamente dal modulo di<br />
deformazione teorico, indica (assieme ai residui) la possibile presenza di misure erronee o non affidabili.<br />
Attualmente, la scarsa affidabilità <strong>delle</strong> coordinate della maggior parte dei PF pregiudica gravemente il risultato<br />
finale dell’operazione, vanificando considerevolmente la funzione cartografica dei PF.<br />
La procedura di ricomposizione proposta, andando a stimare la corretta forma della rete, riconsegna ai Punti Fiduciali il loro ruolo<br />
originario. In questo modo si può procedere all’inserimento diretto dei rilievi PREGEO all’interno della rete compensata, adottando<br />
ancora la metodologia procustiana, e analizzare gli effetti che questo provoca.<br />
Oltre a georeferenziare i rilievi e aggiornare la carta, l’operazione descritta consente di eseguire un’azione di verifica, a posteriori,<br />
della bontà della ricomposizione effettuata. Al momento, questa funzione è realizzata da una rete di Punti Fiduciali di controllo,<br />
appositamente rilevata con metodologia topografica e satellitare; la realizzazione di tale rete, assieme alla materializzazione dei punti<br />
fissi, rappresenta la parte più onerosa dell’intero metodo proposto.<br />
Un’applicazione generalizzata della procedura, come auspicato dagli autori, deve assolutamente limitare il ricorso alle misure dirette,<br />
quanto meno a quelle effettuate a scopo di verifica. E’ necessario allora affiancare un’alternativa che utilizzi nella maniera più<br />
efficace il patrimonio informatico esistente. Nasce da questa esigenza l’idea di utilizzare gli stessi rilievi PREGEO al fine di eseguire<br />
un ulteriore controllo, più capillare, sui risultati della ricomposizione effettuata.<br />
Quest’operazione può essere svolta in due fasi distinte:<br />
1 Innanzi tutto, possiamo verificare la congruenza interna (forma) della rete ricomposta, andando ad analizzare la mutua<br />
posizione dei PF compensati, il tutto a prescindere dal sistema di riferimento;<br />
2 Successivamente, è possibile valutare la coerenza esterna della rete, indagando sulla bontà <strong>delle</strong> coordinate restituite.<br />
La metodologia di quest’analisi è esposta in sintesi: maggiori dettagli e risultati di una sua applicazione sono contenuti nel lavoro di<br />
Beinat, Crosilla e Sossai (2005).<br />
Analisi della congruenza interna: confronto tra punti omologhi<br />
Punti omologhi (o vertici corrispondenti) non sono altro che le diverse rappresentazioni, nei vari rilievi, del medesimo punto fisico; è<br />
evidente che rilievi esatti e rappresentati nel medesimo sistema di riferimento diano luogo alla situazione ideale di vertici omologhi a<br />
coordinate coincidenti.<br />
Da un punto di vista catastale questo principio può essere così riformulato: rilievi esatti, descritti in un sistema locale e arbitrario, se<br />
inseriti mediante apposita trasformazione in una rete di Punti Fiduciali con coordinate ancora esatte, devono determinare punti<br />
corrispondenti precisamente sovrapposti. Il venir meno, anche di una sola, <strong>delle</strong> due condizioni tende a determinare punti<br />
corrispondenti tanto più distanziati quanto è maggiore l’errore introdotto.<br />
Questo principio ha fornito la linea guida, seguita per valutare la coerenza della rete di Punti Fiduciali con coordinate ottenute dal<br />
processo di compensazione procustiana.<br />
Ad ogni configurazione-rilievo, definito nella maniera descritta in precedenza, è stata applicata una trasformazione di<br />
similitudine ai minimi quadrati. I relativi parametri (rotazione, traslazione e fattore di scala) sono stati determinati<br />
dal confronto tra i PF del poligono fiduciale considerato e i corrispettivi della rete analizzata.<br />
Una volta che tutti i rilievi sono stati portati in un sistema di riferimento comune, si è proceduto a valutare l’entità della dispersione<br />
fra le coordinate dei punti omologhi rispetto al loro baricentro. In accordo con le ipotesi del modello procustiano (Goodall, 1991),<br />
essa è stata posta pari al raggio (r) della circonferenza d’incertezza:<br />
2<br />
2<br />
dove: varianza lungo l’asse x; <br />
x<br />
2 2<br />
x y<br />
r <br />
[1]<br />
2<br />
2<br />
y varianza lungo l’asse y, mentre il fattore di covarianza <br />
xy è stato assunto pari a zero.<br />
Secondo quanto espresso ad inizio paragrafo, dovremmo verificare una condizione di non coincidenza dei punti omologhi imputabile<br />
ai soli errori presenti nei rilievi PREGEO. La situazione sopra esposta si verifica sempre e in ogni caso, a prescindere quindi dalle<br />
condizioni effettive della rete di PF, quando i vertici corrispondenti fanno riferimento a rilievi inseriti nel medesimo poligono<br />
fiduciale. E’ necessario escludere, dalla nostra analisi, tutte le osservazioni che ricadono nella condizione ora descritta: saranno da<br />
considerare solo i punti corrispondenti appartenenti a rilievi inseriti in poligoni fiduciali “diversi”. Vediamo di chiarire quest’ultimo<br />
termine.<br />
Siano A e B due poligoni fiduciali qualsiasi, siano inoltre na e nb le rispettive numerosità di PF; senza perdere in generalità<br />
147
148<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
assumiamo che na ≤ nb. Diremo che A e B sono diversi se sussiste la seguente condizione: A B .<br />
Prima di presentare gli esiti di quest’analisi, esponiamo alcune considerazioni sul metodo di indagine proposto, andandone ad<br />
enunciare vantaggi e svantaggi. Tra i primi rientra sicuramente il fatto che quella descritta è un’analisi a costo zero, giacché utilizza<br />
materiale preesistente. Ancora tra i vantaggi possiamo annoverare la caratteristica di non limitare l’indagine ai contenuti della sola<br />
rete di PF, andando a compiere un’analisi puntuale in porzioni interne alla rete stessa. Tra gli svantaggi c’è il fatto che l’applicazione<br />
è possibile solo laddove sono presenti rilievi PREGEO. Particolarmente importante si rivela inoltre questo ultimo aspetto e lo studio<br />
effettuato non consente un giudizio assolutamente definitivo sulla qualità della rete considerata. Questo perché vi è un’oggettiva<br />
difficoltà nel discernere, in maniera esaustiva, l’errore di posizionamento da quello di misura, sopratutto quando quest’ultimo è<br />
presente nei poligoni fiduciali.<br />
3.5<br />
3.0<br />
2.5<br />
2.0<br />
1.5<br />
1.0<br />
0.5<br />
0.0<br />
Inserimento da rete “procustiana”<br />
ricomposta<br />
Confronto della dispersione tra punti omologhi [m]<br />
Inserimento da rete “TAF”<br />
attuale<br />
Figura 1: Confronto della dispersione tra vertici omologhi di rilievi Pregeo, inseriti nella rete fiduciale compensata<br />
(colore blu) e nella rete di PF di coordinate TAF attuali (giallo).<br />
L’istogramma di Figura 1 confronta, puntualmente, la dispersione (r) tra vertici corrispondenti di rilievi PREGEO georeferenziati<br />
utilizzando, in un caso, la rete desumibile dalla TAF con le sue coordinate “attuali”, nell’altro, la medesima ricomposta con metodo<br />
procustiano. E’ evidente, nel passaggio da rete TAF a compensata, una notevole diminuzione del valore di r: in alcuni casi, non così<br />
rari, esso si riduce anche di due ordini di grandezza. Questo non solo dà una definitiva conferma dei progressi che può apportare il<br />
metodo procustiano alla situazione attuale della cartografia catastale, ma ne quantifica anche i relativi miglioramenti.<br />
A riguardo, ancora più immediate si rivelano le Figure 2 e 3, dove sono rappresentati i risultati della<br />
georefenziazione di rilievi PREGEO, prima nella rete definita attraverso la TAF, successivamente nella rete<br />
compensata con l’algoritmo proposto. I colori differenti indicano rilievi riferiti a poligoni fiduciali diversi, in base<br />
all’accezione introdotta in precedenza.<br />
10 m 10 m<br />
Figura 2: Esempio di rilievi georeferenziati mediante TAF [a sinistra] e mediante rete ricomposta [a destra]<br />
L’entità cartografica raffigurata in Figura 2 è stata interessata da rilievi inquadrati mediante due poligoni fiduciali differenti. Come si<br />
può notare, mentre nell’immagine a sinistra, dove si è fatto uso della rete descritta dalla TAF, il rilievo colorato in blu è spostato di<br />
oltre un metro rispetto all’altro, nell’immagine a destra, ottenuta con l’utilizzo della rete ricomposta, la condizione di coincidenza è<br />
praticamente rispettata (dispersione media pari a 4 cm).<br />
Un esempio ancora più eclatante lo abbiamo in Figura 3, che vede rappresentati rilievi riferiti a due diversi poligoni fiduciali. Mentre<br />
a destra è raffigurato un solo complesso di edifici, nella controparte di sinistra lo stesso oggetto si sdoppia in due diverse parti,
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
distanti fra loro oltre 5 metri.<br />
100m<br />
Figura 3: Esempio di rilievi georeferenziati mediante TAF [a sinistra] e mediante rete ricomposta [a destra]<br />
Analisi della congruenza esterna: il confronto con la Carta Tecnica Regionale Numerica del FVG<br />
Nella fase di inquadramento, il metodo di ricomposizione procustiano inserisce tutti i poligoni fiduciali in un unico sistema di<br />
riferimento, definito dalla rete dei punti fissi. Se la posizione di questi viene espressa nel sistema di riferimento nazionale Gauss-<br />
Boaga è possibile un raffronto diretto con gli elementi della cartografia inquadrati in tale sistema. Il nostro caso riguarda gli elementi<br />
della Carta Tecnica Regionale Numerica del Friuli Venezia Giulia.<br />
Un confronto tra vertici omologhi, sulla falsariga di quanto espresso nel paragrafo precedente, consente di valutare la congruenza<br />
esterna della rete compensata con metodo procustiano.<br />
In questo caso l’analisi si presenta più agevole: al posto della dispersione, il parametro di valutazione diventa la<br />
distanza tra un vertice della Carta Tecnica e il suo corrispondente nel rilievo catastale inquadrato. In caso di<br />
ambiguità, dovuto alla presenza fra rilievi di più punti omologhi, si va a considerare il baricentro di questi ultimi.<br />
Nel caso analizzato, l’analisi statistica mostra che oltre la metà <strong>delle</strong> osservazioni presenta differenze inferiori a 21<br />
cm, mentre alzando la soglia a 35 cm quasi 9 su 10 soddisfano tale requisito.<br />
I risultati di quest'indagine testimoniano un ottimo livello di congruenza tra i due contenuti cartografici, tenendo conto che la<br />
precisione effettiva della CTRN del Friuli Venezia Giulia è equivalente a quella di una cartografia alla scala 1:2000.<br />
Gli esiti ora esposti trovano conferma visiva nella Figura 4 che mostra i rilievi PREGEO (colorati di rosso) sovrapposti ai contenuti<br />
della Carta Tecnica Regionale Numerica (rappresentati in grigio).<br />
100m<br />
149
150<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
Figura 4: Sovrapposizione per georeferenziazione diretta fra contenuti della CTRN e della carta catastale ricomposta<br />
Per dare maggiore risalto ai dettagli, sono stati estrapolati dalla Figura 4 i riquadri evidenziati dai contorni blu e viola, rappresentati<br />
nelle Figura 5 e 6, rispettivamente<br />
20 m 20 m<br />
Figura 5: Dettagli della sovrapposizione per georeferenziazione diretta fra contenuti della CTRN e della carta catastale ricomposta
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
20 m<br />
20 m<br />
Figura 6: Dettagli della sovrapposizione per georeferenziazione diretta fra contenuti della CTRN e della carta catastale ricomposta<br />
Nell’esempio di sinistra in Figura 5 è rappresentato un contorno quasi perfettamente sovrapposto (errori dell'ordine<br />
dei 5 cm), mentre nella controparte di destra osserviamo un altro caso di sovrapposizione e sgrondatura di edifici.<br />
Nell’immagine 6 di sinistra viene presentato il risultato della georeferenziazione nel caso di un edificio<br />
particolarmente complesso a superficie curva; nella Figura 6 di destra, è da notare con particolare attenzione l’effetto<br />
della sgrondatura realizzata dall’inserimento del rilievo PREGEO all’interno della CTRN.<br />
4. PARTE TERZA: LA MOSAICATURA DELLE PARTICELLE CATASTALI<br />
Dalle analisi esposte in quest'articolo si evince che, appoggiandosi alla rete di PF ricomposta con l'algoritmo procustiano, già si<br />
realizza un buon accordo reciproco tra i singoli rilievi (congruenza interna). Nel contempo, si ottiene una buona corrispondenza tra i<br />
contenuti cartografico-<strong>catastali</strong> e gli elementi grafici della Cartografia Tecnica Regionale Numerica (congruenza esterna).<br />
Tutto questo è il risultato dell'applicazione locale di una trasformazione di similitudine ai vari rilievi, mentre nessun'operazione di<br />
compensazione è stata ancora eseguita sulle coordinate degli stessi: conseguentemente rilievi diversi di una stessa entità catastale,<br />
seppur inquadrati nel migliore dei modi, potrebbe non sovrapporsi perfettamente a causa degli inevitabili errori residui di natura<br />
accidentale (Figura 7a). Una ricomposizione completa e rigorosa della cartografia numerica catastale richiede quindi di operare una<br />
compensazione anche a livello dei vertici che definiscono le particelle stesse. L'algoritmo procustiano è idoneo a realizzare tale<br />
obiettivo: gestendo l'integrazione dei dati presenti in cartografia con i nuovi rilievi PREGEO, consente di ricomporre la carta<br />
numerica attraverso una progressiva azione di mosaicatura <strong>delle</strong> particelle, condotta secondo le stesse tecniche con cui sono trattati i<br />
Poligoni Fiduciali.<br />
L’automazione di questa operazione è ostacolata dall’assenza di una etichettatura univoca degli elementi grafici che consenta di<br />
individuare le corrispondenze tra vertici omologhi, in quanto essi, al contrario dei PF, non seguono alcuna regola di denominazione.<br />
Si è reso necessario pertanto affrontare il problema della ricerca automatica di corrispondenze tra entità <strong>catastali</strong> anche nell’ipotesi di<br />
archivi numerici non strutturati.<br />
Figura 7: Medesimi elementi cartografici presenti simultaneamente in 3 fogli diversi della mappa catastale: originale (a); ottenuta<br />
per adattamento indipendente dei fogli di mappa (b); risultato della ricomposizione conforme (c)<br />
151
152<br />
Ricerca automatica di corrispondenze tra entità cartografiche <strong>catastali</strong><br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
La ricomposizione della cartografia catastale esige una serie di dati coerentemente definiti e opportunamente strutturati: nel caso dei<br />
poligoni fiduciali, questa condizione è soddisfatta grazie ad un’univoca codifica degli identificativi dei PF. Trattando coi fogli mappa<br />
e i rilievi PREGEO, invece siamo di fronte ad un archivio numerico decisamente stratificato i cui comparti, chiusi quasi<br />
ermeticamente, interagiscono molto difficilmente gli uni rispetto agli altri, anche se la situazione è decisamente migliorata a partire<br />
dall’introduzione della procedura informatica PREGEO 8.<br />
Unica soluzione è risolvere le corrispondenze tra i vertici omologhi <strong>delle</strong> entità <strong>catastali</strong>: facendo ciò si va ad introdurre una<br />
topologia univocamente definita, la quale consente di realizzare una struttura dati di immediato trattamento informatico e di costruire<br />
un archivio numerico catastale intrinsecamente coerente ed omogeneo. A causa <strong>delle</strong> non uniformi condizioni di partenza dei dati<br />
geometrici <strong>catastali</strong>, la ricerca <strong>delle</strong> corrispondenze è stata impostata come un problema di allineamento di configurazioni con<br />
struttura topologica assente e prive di informazioni semantiche. Per la risoluzione è stato implementato un metodo iterativo<br />
liberamente ispirato all’algoritmo EM (Luo, Hancock; 2002) con assegnamento flessibile. Particolarità dell’approccio è costruire una<br />
matrice <strong>delle</strong> corrispondenze C (Chui, Rangarajan; 2003) non da subito tipicamente booleana, ma dove a ciascun elemento cij è<br />
associata la probabilità di corrispondenza tra l’i-esimo vertice di una configurazione e il j-esimo dell’altra; tale probabilità è espressa<br />
come distanza gaussiana calcolata in funzione della mutua distanza euclidea tra i due vertici e r, un raggio di ricerca opportunamente<br />
assegnato (passo E). I valori contenuti in C permettono di determinare i parametri della trasformazione di similitudine con la quale<br />
sovrapporre, nel migliore dei modi, una configurazione rispetto all’altra (passo M). I passi E ed M vengono iterati riducendo di volta<br />
in volta il valore di r in funzione del numero di vertici, della qualità <strong>delle</strong> corrispondenze suggerite e degli outliers e il metodo si<br />
arresta quando il raggio di ricerca assume valori inferiori a σ, scalare che riassume l’entità del rumore di fondo presente nelle due<br />
configurazioni. Se al termine del processo iterativo la matrice C non è ancora divenuta booleana in ogni sua riga e colonna, si<br />
procede all’introduzione dell’informazione topologica, comunque presente nei dati di partenza, sebbene non univocamente definita, e<br />
ora parzialmente utilizzabile grazie alle corrispondenze certamente individuate, la quale permette di definire dei controlli logici sulle<br />
adiacenze e geometrici sugli angoli, consentendo di risolvere le ambiguità residue.<br />
Ricomposizione particellare progressiva<br />
Salvo limitate estensioni, non sono molte le aree del territorio nazionale che siano state completamente interessate da attività di<br />
aggiornamento catastale. Ne consegue che la procedura di ricomposizione procustiana <strong>delle</strong> singole particelle fin qui descritta non<br />
può essere attuata estesamente per costruire mappe ex-novo se non per contesti limitati.<br />
Allo scopo di non lasciare comunque inutilizzato il patrimonio di dati dell’archivio Pregeo, è stata elaborata dagli autori una<br />
soluzione dinamica in grado comunque di attuare un aggiornamento progressivo nel corso del tempo. L’idea è quella di integrare le<br />
particelle mancanti della carta catastale ricomposta, non ancora rilevate, con i corrispondenti elementi tratti dalla cartografia<br />
esistente. Mano a mano che si rendono disponibili gli aggiornamenti questi sostituiscono le entità geometriche inserite<br />
provvisoriamente.<br />
Lo studio sperimentale condotto su dei casi simulati ha affrontato la situazione duale (Lavarini, 2005), ossia quella in cui, a partire da<br />
una configurazione esistente di particelle deformate, si sostituiscono progressivamente nuovi elementi geometricamente corretti e si<br />
effettua, dopo ogni inserimento, la riaggregazione procustiana. In luogo di una semplice sostituzione di coordinate tra vertici<br />
omologhi, questa è realizzata attraverso un processo di mosaicatura conforme <strong>delle</strong> particelle: il foglio di mappa viene disaggregato<br />
nei suoi elementi minuti (bordi e linee, nella codifica CXF); gli elementi digitalizzati sono sostituiti con la loro controparte misurata<br />
direttamente in campagna; il tutto viene infine riaggregato, ancora mediante algoritmo GPA, nel rispetto dei vincoli costituiti dai<br />
Punti Fiduciali ottenuti dalla compensazione conforme della rete, dai vertici dei rilievi PREGEO inseriti nella rete fiduciale e dai<br />
punti di bordo del foglio di mappa determinati dalla ricomposizione dei fogli (vedi oltre). Questi ultimi vincoli si rivelano<br />
particolarmente importanti innanzi tutto perché permettono di conservare la continuità cartografica, che altrimenti andrebbe<br />
vanificata dalla disaggregazione del foglio di mappa, e permettono di ridurre sensibilmente l’effetto di accumulo di errori sul bordo<br />
manifestatosi nella sperimentazione in ambiente simulato (Lavarini; 2005).<br />
La sperimentazione mostra come, al crescere del numero dei nuovi elementi “corretti” diminuisca proporzionalmente il numero di<br />
punti la cui posizione supera un errore di soglia prestabilito. Significativo che il 50% circa di elementi sostituiti renda praticamente<br />
nulla la percentuale di punti con errore di posizione superiore al 10% dell’errore iniziale, e confini al 25-30% (secondo i casi) la<br />
numerosità di quelli per i quali l’errore supera il 5% del valore di partenza (Beinat Crosilla e Sossai, 2005).<br />
Terminata la compensazione, la stima della posizione di un generico vertice della mappa verrà data dal baricentro <strong>delle</strong> coordinate<br />
dei suoi punti omologhi, ora disposti nella configurazione a dispersione minima. La figura 7c mette in luce come l’applicazione della<br />
GPA abbia prodotto una netta riduzione <strong>delle</strong> dispersioni rispetto all’originale carta catastale e conseguentemente alla cartografia<br />
ottenuta da trasformazioni indipendenti dei fogli. Un’ulteriore conferma della validità dell’algoritmo la possiamo apprezzare in figura<br />
7c, dove è ben evidente la buona sovrapposizione, risultato della GPA, degli stessi elementi cartografici presenti simultaneamente in<br />
tre fogli di mappa diversi; analoga situazione non la riscontriamo nella mappa d’origine (figura 7a) né tanto meno nella carta ottenuta<br />
dall’adattamento indipendente dei fogli (figura 7b).<br />
5. RICOMPOSIZIONE DELLE MAPPE E CREAZIONE DEL CONTINUUM CARTOGRAFICO<br />
Come si è detto, la ricomposizione particellare attuata ex-novo, senz’altro la più precisa, richiede che tutte le particelle che<br />
compongono la mappa siano state interessate da atti di aggiornamento. Allo stesso tempo la ricomposizione particella progressiva,<br />
con la sostituzione degli elementi aggiornati a quelli d’impianto, ha tempi di realizzazione ancora elevati rispetto alle necessità<br />
urgenti di molte amministrazioni pubbliche.<br />
Una via vantaggiosa per fornire agli enti locali una copertura cartografica catastale, continua e correttamente georeferenziata,<br />
congruente in buona misura con la carta tecnica, è quello di procedere alla ricomposizione procustiana tra le singole mappe.
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
La procedura è per buona parte la stessa descritta per le singole particelle, solo che ad essere riaggregati tra loro sono i singoli fogli di<br />
mappa. In questo caso ciascun foglio di mappa viene ruotato, traslato e scalato, previo un grossolano inquadramento, in modo tale da<br />
adattarsi al meglio, secondo il principio dei minimi quadrati, sia agli altri fogli, sia ai vincoli rappresentati dalla rete fiduciale e dai<br />
rilievi PREGEO ivi inseriti. Il processo viene iterato sino a quando l’entità dei singoli parametri di trasformazione di ogni foglio non<br />
assume valori trascurabili.<br />
Il processo in dettaglio<br />
Anche in questo caso, come nella ricomposizione particellare, il punto di partenza è costituito dalla rete dei Punti Fiduciali<br />
ricomposta con il metodo Procustiano. Tale operazione, affinché sia affidabile, richiede la determinazione topografica di circa il 10%<br />
dei vertici componenti la rete.<br />
All’interno della rete ricomposta vengono collocati i rilievi Pregeo disponibili, mediante adattamento conforme a minimi quadrati.<br />
Tra la carta ricomposta (ancorché parziale, ma topograficamente corretta e già inquadrata nel datum di destinazione) e le mappe<br />
esistenti (inquadrate nel riferimento locale) si determinano per via automatica, assistita da un operatore, gli elementi di<br />
corrispondenza, che risultano gli stessi tra le due carte in virtù dell’identico tematismo. Tali elementi costituiscono un primo insieme<br />
di punti di controllo.<br />
Un secondo insieme di punti di legame viene definito dai vertici del perimetro comuni a due mappe contigue.<br />
Un terzo insieme, simile al primo, è costituito dai punti fiduciali di coordinate analitiche note, rideterminati per via topografica nel<br />
nuovo datum di inquadramento.<br />
A questo punto i singoli fogli sono singolarmente traslati, ruotati e scalati in modo da adattarsi reciprocamente, secondo il principio<br />
dei minimi quadrati, rispettando i vincoli costituiti dalla rete fiduciale ricomposta e dagli elementi dei rilievi PREGEO corrispondenti<br />
inseriti nella stessa.<br />
Questa soluzione permette di ovviare alcuni problemi presenti in altre soluzioni proposte in letteratura, in particolare la scelta dei<br />
punti di controllo per confronto tra Carta Tecnica e Carta Catastale o tra Ortofoto e Carta Catastale. In questi casi non solo i<br />
tematismi sono diversi, ma anche le regole di restituzione, fatti che rendono la identificazione automatica di corrispondenze tra i due<br />
prodotti non facile né corretta. In particolare i confini <strong>delle</strong> particelle raramente coincidono con elementi fisici del terreno quali muri<br />
e recinzioni, così come le piante degli edifici nella carta catastale riportano convenzionalmente quella dei muri perimetrali a 1.5 m da<br />
terra e non le linee di gronda della copertura come nella carta tecnica.<br />
Figura 8- Particolare di carta catastale ricomposta (a colori) sovrapposta alla Carta Tecnica Regionale Numerica<br />
del Friuli Venezia Giulia (in nero)<br />
6. UNA CARTA TECNICA CATASTALE DI RACCORDO<br />
Al di là della complessità e del costo <strong>delle</strong> soluzioni, uno degli ostacoli comprensibili che si frappone al completo recupero della<br />
congruenza geometrica della cartografia catastale è rappresentato proprio dalla sua valenza ai fini giuridici e fiscali. E’ chiaro che una<br />
modifica <strong>delle</strong> geometrie contenute <strong>delle</strong> mappe, ove si rivelasse significativa ed oltre le tolleranze ammesse dall’amministrazione<br />
del catasto, implicherebbe l’attivazione di procedure amministrative complesse e onerose in termini di tempo.<br />
Nel contempo è pressante la richiesta degli Enti Locali di disporre di una cartografia catastale sovrapponibile gli altri strumenti di<br />
153
154<br />
M. Barbarella, F. Radicioni, F. Sansò editori<br />
cartografici in uso per la gestione del territorio. Queste incongruenze sono molto dispendiose per la collettività e ingenerano spesso<br />
problemi amministrativi in operazioni di esproprio, definizione di vincoli urbanistici, rilascio di concessioni edilizie, etc.<br />
La nostra proposta è quindi quella di lavorare fuori campo alla creazione di una Carta Tecnica Catastale (CTC), geometricamente<br />
corretta, avente la funzione di raccordare la Carta Catastale ufficiale alle altre cartografie. Con questa soluzione il collegamento tra la<br />
CTC e la Carta Catastale avverrebbe per congruenza topologica degli stessi elementi rappresentati, mentre quello tra CTC e altre<br />
carte topografiche avverrebbe sul piano del datum cartografico comune.<br />
A regime la CTC potrebbe quindi sostituire la CT sulla base di uno specifico atto amministrativo o legislativo.<br />
BIBLIOGRAFIA<br />
Beinat, A., Crosilla, F. 2002 Una procedura per la ricomposizione conforme della cartografia catastale digitale, Bollettino SIFET, 1,<br />
pp 17-34.<br />
Beinat, A., Crosilla, F., Clerici, A. 2002 Prime sperimentazioni di una proposta innovativa per la ricomposizione cartografica del<br />
catasto”, In: Atti VI Conferenza Nazionale ASITA, Perugia 5-8 novembre, pp. 355-360.<br />
Beinat, A., Crosilla, F. 2003 Generalised Procrustes Algorithms for the Conformal Updating of a Cadastral Map, ZfV-Zeitschrift für<br />
Geodäsie, Geoinformation und Landmanagement, 5, pp. 341-349.<br />
Beinat, A., Crosilla, F., Sossai, E. 2004 Analisi della copertura e prime sperimentazioni di concatenamento a scala regionale dei<br />
poligoni fiduciali in Friuli Venezia Giulia, In: Atti VIII Conferenza Nazionale ASITA, Roma 14-17 Dicembre, pp. 339-344<br />
Beinat, A., Crosilla, F., Furlan, M., Sossai, E. 2004 Ricomposizione procustiana della rete fiduciale catastale mediante dati<br />
dell’archivio PREGEO, In: Atti VIII Conferenza Nazionale ASITA, Roma 14-17 Dicembre, pp. 333-338.<br />
Beinat, A., Crosilla, F., Sossai, E. 2005 Ricomposizione particellare conforme della cartografia catastale numerica, Atti<br />
del Convegno Nazionale SIFET, Mondello (Palermo), 29/06/2005-01/07/2005.<br />
Crespi, M., Reina, T. 2004 <strong>Applicazioni</strong> non <strong>catastali</strong> dei punti fiduciali: proposta di una metodologia per l’inquadramento<br />
della maglia dei punti fiduciali nel sistema cartografico UTM-WGS84-ETRF89, Bollettino SIFET, 3, pp. 13-22.<br />
Crosilla, F., Beinat, A. 2002 Use of generalised Procrustes analysis for the photogrammetric block adjustment by independent<br />
models, ISPRS Journal of Photogrammetry and Remote Sensing, Vol 56, Issue 3, April 2002, pp. 195-209<br />
Commandeur, J.J.F. 1991 Matching Configurations, DSWO Press, Leiden University, III, M&T series, 19, pp. 13-61.<br />
Conia, G., Del Frate, R., Mencancini, N., Tufillaro, D. 1992 Procedura automatica per il controllo della congruenza dei tipi di<br />
aggiornamento sulla base di un quadro d’unione della rete dei punti fiduciali e della misura G.P.S. di alcuni lati significativi,<br />
Bollettino SIFET, 4, pp 87-97.<br />
Dryden, I., Mardia, K. 1998 Statistical shape analysis, John Wiley & Sons, Chichester, England, pp. 83-107.<br />
Goodall, C. 1991 Procrustes methods in the statistical analysis of shape, Journal Royal Stat. Soc., Series B-Methodological 53 (2),<br />
pp. 285-339.<br />
Lavarini, L. 2005 Un metodo evolutivo per l’aggiornamento della cartografia catastale numerica, Tesi di laurea, Università di<br />
Udine, A.A. 2004-2005.<br />
Luo, B., Hancock, E. R. 2002 Iterative Procrustes alignment with the EM algorithm, Image and Vision Computing, 20, pp. 377-396.<br />
Sossai, E. 2005 La ricomposizione di una rete fiduciale catastale di ampie dimensioni: l'esempio di Tarcento (UD), Atti 9a<br />
Conferenza nazionale ASITA, Catania 15-18 novembre 2005.<br />
Sossai, E. 2006 Ricomposizione cartografica mediante integrazione di rilievi PREGEO e di cartografia numerica esistente, Atti 10a<br />
Conferenza nazionale ASITA, Bolzano 14-17 novembre 2006.<br />
Tong, X. H., Shi, W. Z., Liu, D. J. 2005 A Least Squares-Based Method for Adjusting the Boundaries of Area Objects,<br />
Photogrammetric Engineering & Remote Sensing, 71 (2), pp. 189-195.
Lo sviluppo <strong>delle</strong> tecnologie per le <strong>reti</strong> <strong>geodetiche</strong><br />
155
156<br />
M. Barbarella, F. Radicioni, F. Sansò editori