

La Girobussola (livello 1)
La Girobussola (livello 1)
La Girobussola (livello 1)

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>La</strong> <strong>Girobussola</strong><br />
Chi non ha giocato almeno una volta, da bambino, con una trottola. Il gioco più bello<br />
era quello di farla stare in piedi anche dopo averle fatto scendere un gradino, oppure<br />
dopo averle dato una spinta.<br />
In quei momenti, inconsapevolmente, giocavamo con un principio di fisica che<br />
prende il nome di “ Inerzia Giroscopica” . Ma cosa significa? Quando la trottola ruota<br />
velocemente intorno al suo asse, acquista una particolare proprietà, quella di<br />
mantenere l’asse di rotazione rivolto sempre in una medesima direzione, nonostante<br />
le spinte e i gradini da scendere. In fisica, un corpo che ruota ad alta velocità intorno<br />
al suo asse è chiamato “ giroscopio” . L’inerzia giroscopica è la caratteristica propria<br />
di un giroscopio che è quella di mantenere il suo asse di rotazione rivolto sempre<br />
verso un punto dello spazio inerziale (una stella) e di potersi orientare liberamente.<br />
Questa è la stessa proprietà utilizzata nelle armi balistiche per aumentarne la<br />
precisione e la gittata, e si ottiene mediante una scarificazione a spirale della canna<br />
di fuoco.<br />
Il giroscopio, però, ha anche altre proprietà che vengono sfruttate per la<br />
realizzazione della girobussola. <strong>La</strong> principale tra queste è quella di non rispondere<br />
alla meccanica comune quando si applica una forza in punto dell’asse di rotazione.<br />
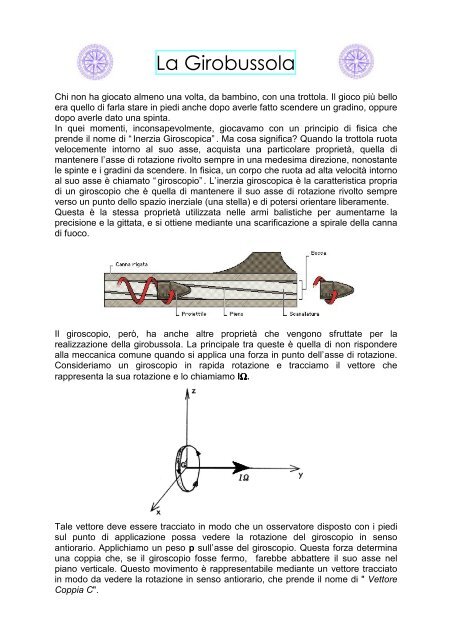
Consideriamo un giroscopio in rapida rotazione e tracciamo il vettore che<br />
rappresenta la sua rotazione e lo chiamiamo IΩ.<br />
Tale vettore deve essere tracciato in modo che un osservatore disposto con i piedi<br />
sul punto di applicazione possa vedere la rotazione del giroscopio in senso<br />
antiorario. Applichiamo un peso p sull’asse del giroscopio. Questa forza determina<br />
una coppia che, se il giroscopio fosse fermo, farebbe abbattere il suo asse nel<br />
piano verticale. Questo movimento è rappresentabile mediante un vettore tracciato<br />
in modo da vedere la rotazione in senso antiorario, che prende il nome di " Vettore<br />
Coppia C".
Sperimentalmente, però, ci si è resi conto che il giroscopio risponde alla forza p con<br />
una rotazione dell’asse su un piano ad esso perpendicolare, cioè cercherà di<br />
raggiungere il vettore coppia C.<br />
Questo movimento è chiamato “ Precessione libera” .<br />
Una cosa simile succede se invece di una forza, si applica una rotazione. In questo<br />
caso, infatti, applicando una rotazione antioraria all’asse Z del giroscopio, vedremo<br />
nascere un movimento precessionario, definito "Precessione forzata", che porta<br />
l'asse del girostato a sovrapporsi al vettore ω.<br />
Otteniamo lo stesso risultato anche se applichiamo la rotazione all’asse X. Questo,<br />
ci porta a concludere, che l'asse del giroscopio tende sempre a sovrapporsi al<br />
vettore che rappresenta la rotazione perturbatrice (Teoria della sovrapposizione<br />
delle velocità).<br />
Pertanto se si potesse sottoporre il giroscopio ad una rotazione tale che il relativo<br />
vettore fosse allineato perfettamente con la linea meridiana NORD-SUD, si<br />
potrebbero creare i presupposti per trasformare la nostra "trottola" in uno strumento
direzionale! In realtà questa rotazione esiste già ed è determinata dalla rotazione<br />
terrestre. Ecco come nasce.<br />
Il nostro pianeta ruota intorno al suo asse in senso antiorario. Tale rotazione può<br />
essere rappresentata mediante un vettore ρ rivolto verso il polo nord ed il cui punto<br />
di applicazione è il centro della terra. Ipotizzando un osservatore posto nell'emisfero<br />
nord ad una latitudine Φ, il suo piano orizzontale è soggetto alla stessa rotazione<br />
che, per comodità, scomponiamo in due vettori: una componente rivolta verso lo<br />
ZENIT (ρ"); mentre la seconda rivolta verso il cardine NORD del piano meridiano<br />
(ρ'). Queste due rotazioni angolari dovute alla rotazione terrestre, sono quelle che<br />
rappresentano, rispettivamente, il movimento apparente in azimut degli astri (il piano<br />
ruota in senso antiorario intorno all’asse Zenit-Nadir) ed il movimento apparente in<br />
altezza degli astri (il piano ruota in senso orario intorno all’asse Nord-Sud).<br />
Dunque, se vincoliamo il giroscopio al piano orizzontale, in pratica non facciamo<br />
altro che rendere inattiva la rotazione in azimut (ossia la componente ρ") e quindi il<br />
giroscopio orienterà il suo asse con un movimento precessionario lungo la linea<br />
meridiana sovrapponendosi alla componente ρ' della rotazione terrestre (Bussola di<br />
Foucault).<br />
Purtroppo una soluzione simile è impossibile sulle navi a causa dei movimenti di<br />
rollìo, beccheggio e imbardata (movimenti di piattaforma). E' possibile però, ricreare<br />
il piano orizzontale sospendendo il giroscopio e applicandovi una zavorra. In questo<br />
modo, durante le rotazioni del piano meridiano, il giroscopio è assoggettato ai due<br />
vettori della rotazione terrestre e ad un terzo vettore che nasce a causa della<br />
zavorra. Questa, infatti, determina una coppia ogni qualvolta l'asse del giroscopio si
allontana dal piano orizzontale facendolo precessionare sulla linea meridiana<br />
NORD-SUD.<br />
Adesso la nostra trottola è diventata una bussola giroscopica. Ma per poter essere<br />
utilizzata a bordo delle navi, è necessario che l'allineamento avvenga in tempi<br />
relativamente brevi. Infatti, se non ci fossero gli attriti, l'asse del girostato non si<br />
allineerebbe mai percorrendo un'ellisse definita "Ellisse teorica". E' necessario,<br />
quindi, creare un sistema di smorzamento delle oscillazioni tali da consentire un<br />
allineamento iniziale rapido ed un sicuro mantenimento dello stesso.<br />
Per ovviare a quest'ultimo inconveniente, due brevetti diventano i sistemi di<br />
smorzamento per antonomasia: SPERRY e MICROTECNICA. Entrambi assolvono<br />
allo stesso compito utilizzando tecniche diverse. Il primo mediante un sistema di<br />
vaschette comunicanti denominato "Balistico a Mercurio", il secondo attraverso l'uso<br />
di un truogolo ad olio.<br />
Finalmente, adesso, la nostra girobussola è completa. Non resta che arricchirla di<br />
tutti quegli accessori necessari per renderla uno strumento direzionale della<br />
navigazione moderna.<br />
Determinazione dell'errore<br />
Al fine di tenere sotto controllo l'errore residuo della girobussola, si deve effettuare<br />
un semplice calcolo:<br />
1. Determinare l'istante del sorgere e calcolare l'azimut vero del sole;<br />
2. Misurare al medesimo istante l'azimut vero del sole (lembo superiore) mediante<br />
un apparecchio azimutale posto sulla ripetitrice dell'aletta (o in controplancia);<br />
3. Eseguire la sottrazione Azv - Azo per ottenere l'errore εg della girobussola;<br />
4. Essendo nota la relazione Pv = Pgb +εg , si può controllare anche la bussola<br />
magnetica eseguendo:<br />
5. (1) Pv = Pgb +εg (2) Vm = Pv - Pbussola (3) δ = Vm - d<br />
Tutti calcoli vengono riportati su un quaderno. <strong>La</strong> deviazione bussola così ottenuta<br />
va confrontata con quella tabellata redatta dal compensatore (tabella delle<br />
deviazioni). Se il valore non corrisponde, è necessario verificare l'errore per diverse<br />
"prore".
