Tutorial: le trasformazioni geometriche - Math.it
Tutorial: le trasformazioni geometriche - Math.it
Tutorial: le trasformazioni geometriche - Math.it

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Le <strong>trasformazioni</strong> <strong>geometriche</strong><br />
Le <strong>trasformazioni</strong> <strong>geometriche</strong><br />
Le <strong>trasformazioni</strong> affini del piano o affin<strong>it</strong>à<br />
Le simil<strong>it</strong>udini<br />
Le isometrie<br />
Le traslazioni<br />
Le rotazioni<br />
Le simmetrie assia<strong>le</strong> e centra<strong>le</strong><br />
Le omotetie<br />
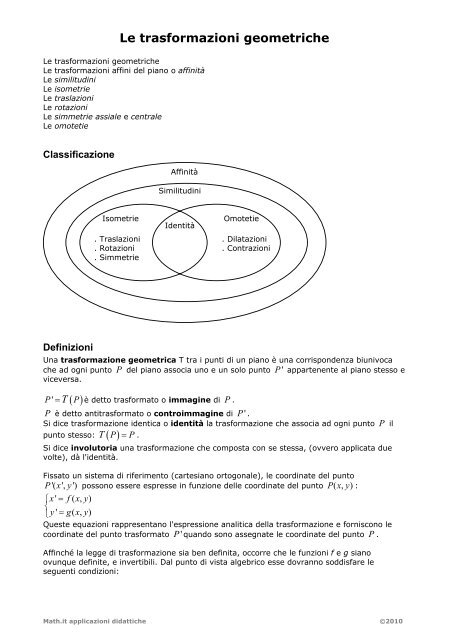
Classificazione<br />
Definizioni<br />
Una trasformazione geometrica T tra i punti di un piano è una corrispondenza biunivoca<br />
che ad ogni punto P del piano associa uno e un solo punto P ' appartenente al piano stesso e<br />
viceversa.<br />
T ( )<br />
Simil<strong>it</strong>udini<br />
Isometrie Omotetie<br />
Ident<strong>it</strong>à<br />
. Traslazioni<br />
. Rotazioni<br />
. Simmetrie<br />
Affin<strong>it</strong>à<br />
P'= P è detto trasformato o immagine di P .<br />
. Dilatazioni<br />
. Contrazioni<br />
P è detto ant<strong>it</strong>rasformato o controimmagine di P ' .<br />
Si dice trasformazione identica o ident<strong>it</strong>à la trasformazione che associa ad ogni punto P il<br />
punto stesso: T ( P) = P .<br />
Si dice involutoria una trasformazione che composta con se stessa, (ovvero applicata due<br />
volte), dà l'ident<strong>it</strong>à.<br />
Fissato un sistema di riferimento (cartesiano ortogona<strong>le</strong>), <strong>le</strong> coordinate del punto<br />
P'( x', y') possono essere espresse in funzione del<strong>le</strong> coordinate del punto Pxy ( , ) :<br />
⎧x<br />
' = f( x, y)<br />
⎨<br />
⎩ y' = g( x, y)<br />
Queste equazioni rappresentano l'espressione anal<strong>it</strong>ica della trasformazione e forniscono <strong>le</strong><br />
coordinate del punto trasformato P ' quando sono assegnate <strong>le</strong> coordinate del punto P .<br />
Affinché la <strong>le</strong>gge di trasformazione sia ben defin<strong>it</strong>a, occorre che <strong>le</strong> funzioni f e g siano<br />
ovunque defin<strong>it</strong>e, e invertibili. Dal punto di vista algebrico esse dovranno soddisfare <strong>le</strong><br />
seguenti condizioni:<br />
<strong>Math</strong>.<strong>it</strong> applicazioni didattiche ©2010
• non possono essere funzioni razionali fratte perché eventuali coppie ( x, y ) che<br />
annullino il denominatore non avrebbero corrispondente nella trasformazione;<br />
• non possono contenere potenze di grado pari di x o y perché la trasformazione non<br />
sarebbe biunivoca (due controimmagini per radicandi pos<strong>it</strong>ivi o nessuna<br />
controimmagine nel caso di radicandi negativi);<br />
• non possono essere irrazionali con indice pari perché <strong>le</strong> eventuali coppie ( x, y ) che<br />
rendono negativo il radicando non avrebbero immagine nella trasformazione.<br />
Punti un<strong>it</strong>i<br />
Un punto si dice un<strong>it</strong>o rispetto alla trasformazione T se la sua immagine P' coincide con P.<br />
Operativamente per determinare i punti un<strong>it</strong>i di una data trasformazione basta esprimere la<br />
condizione in termini di coordinate:<br />
( , )<br />
( , )<br />
⎧ x'= x ⎪⎧<br />
f xy = x<br />
P≡ P'⇒<br />
⎨ ⇒ ⎨<br />
⎩y'= y ⎪⎩<br />
g x y = y<br />
E' bene ricordare che un sistema di equazioni può essere:<br />
- determinato in tal caso si avrà un numero fin<strong>it</strong>o di punti un<strong>it</strong>i;<br />
- indeterminato a cui corrisponderanno un numero infin<strong>it</strong>o di punti un<strong>it</strong>i;<br />
- impossibi<strong>le</strong> e non si avranno punti un<strong>it</strong>i.<br />
Figure un<strong>it</strong>e<br />
Si dice un<strong>it</strong>a una figura che nella trasformazione corrisponde a se stessa.<br />
Le figure un<strong>it</strong>e non sempre sono cost<strong>it</strong>u<strong>it</strong>e da punti un<strong>it</strong>i; per esempio in una simmetria<br />
assia<strong>le</strong> <strong>le</strong> rette perpendicolari all'asse di simmetria sono un<strong>it</strong>e, ma non cost<strong>it</strong>u<strong>it</strong>e da punti un<strong>it</strong>i.<br />
<strong>Math</strong>.<strong>it</strong> applicazioni didattiche ©2010
Affin<strong>it</strong>à<br />
Un'affin<strong>it</strong>à (o trasformazione affine) fra due piani π e π ' è un'applicazione biiettiva T che fa<br />
corrispondere al punto P( x, y ) il punto P'( x', y ')<br />
secondo la formula:<br />
⎧x<br />
' = ax + by + e<br />
⎨<br />
⎩y'=<br />
cx+ dy+ f<br />
dove i coefficienti a, b, c, d, e, f sono numeri reali.<br />
L'applicazione è biiettiva (quindi invertibi<strong>le</strong>) se ad − bc ≠ 0 .<br />
L'applicazione T può essere scr<strong>it</strong>ta anche sotto forma di prodotto fra matrici:<br />
⎛x'⎞ ⎛a b⎞ ⎛x⎞ ⎛ e⎞<br />
⎜ ⎟= ⎜ ⎟⋅ ⎜ ⎟+ ⎜ ⎟<br />
⎝y'⎠ ⎝c d⎠ ⎝y⎠ ⎝ f ⎠<br />
⎛a b⎞<br />
sotto l'ipotesi che det A ≠ 0 , dove la matrice A = ⎜ ⎟ è la matrice dell'affin<strong>it</strong>à.<br />
⎝c d⎠<br />
Si ha un'affin<strong>it</strong>à regolare se det A ≠ 0<br />
In particolare diretta se det A > 0 , inversa se det A < 0 .<br />
La condizione det A= ad −bc≠ 0 equiva<strong>le</strong> a richiedere l'invertibil<strong>it</strong>à della trasformazione che,<br />
come è noto dalla definizione, è una corrispondenza biunivoca dei punti del piano.<br />
Proprietà fondamentali.<br />
Si può dimostrare che un'affin<strong>it</strong>à gode del<strong>le</strong> seguenti proprietà:<br />
• trasforma rette in rette;<br />
• se tre punti P, Q, R sono allineati, i loro corrispondenti in un'affin<strong>it</strong>à P', Q', R' sono<br />
anch'essi allineati;<br />
• a rette paral<strong>le</strong><strong>le</strong> corrispondono rette paral<strong>le</strong><strong>le</strong> e a rette incidenti corrispondono rette<br />
incidenti;<br />
• conserva il rapporto fra segmenti paral<strong>le</strong>li (in particolare al punto medio di un<br />
segmento corrisponde il punto medio del segmento trasformato);<br />
Area ( S ')<br />
• se la figura S' è l'immagine corrispondente di una figura S, allora<br />
det A<br />
Area ( S )<br />
=<br />
dove det A= ad − bc.<br />
In genera<strong>le</strong> un'affin<strong>it</strong>à:<br />
• non conserva la forma del<strong>le</strong> figure. Infatti l'immagine di un rettangolo è in genera<strong>le</strong> un<br />
paral<strong>le</strong>logramma, così come l'immagine di una circonferenza è un'ellisse.<br />
• non conserva gli angoli, per esempio rette perpendicolari non necessariamente<br />
vengono trasformate in rette perpendicolari.<br />
<strong>Math</strong>.<strong>it</strong> applicazioni didattiche ©2010
Simil<strong>it</strong>udini<br />
Una simil<strong>it</strong>udine è una trasformazione geometrica affine in cui resta invariato il rapporto fra<br />
AB<br />
<strong>le</strong> distanze di coppie di punti corrispondenti (A,B) e (A',B') ovvero: = k .<br />
AB ' '<br />
Dal punto di vista anal<strong>it</strong>ico una simil<strong>it</strong>udine è un tipo particolare di affin<strong>it</strong>à in cui<br />
risulti: a = d e c=− b oppure a =− d e c= b (coefficienti diagonali opposti).<br />
Perciò una simil<strong>it</strong>udine può essere rappresentata in due soli modi:<br />
⎧x<br />
' = ax + by + e<br />
⎨ simil<strong>it</strong>udini dirette det A > 0<br />
⎩y'=−<br />
bx+ ay+ f<br />
⎧x<br />
' = ax + by + e<br />
oppure ⎨ simil<strong>it</strong>udini inverse det A < 0 .<br />
⎩y'=<br />
bx− ay+ f<br />
Il numero k pos<strong>it</strong>ivo defin<strong>it</strong>o da<br />
2 2<br />
k = a + b si dice rapporto di simil<strong>it</strong>udine.<br />
Proprietà fondamentali<br />
Si può dimostrare che una simil<strong>it</strong>udine gode del<strong>le</strong> seguenti proprietà:<br />
• Una simil<strong>it</strong>udine trasforma segmenti in segmenti di rapporto k (definizione);<br />
• Una simil<strong>it</strong>udine trasforma rette in rette;<br />
• Una simil<strong>it</strong>udine trasforma angoli in angoli di ugua<strong>le</strong> ampiezza, in particolare conserva<br />
il paral<strong>le</strong>lismo e la perpendicolar<strong>it</strong>à;<br />
• Una simil<strong>it</strong>udine trasforma aree in aree di rapporto 2<br />
k . Se la figura S ' è l'immagine<br />
Area ( S ') 2<br />
corrispondente di una figura S , allora = k ;<br />
Area ( S )<br />
• Il centro di simil<strong>it</strong>udine è punto un<strong>it</strong>o;<br />
• Le simil<strong>it</strong>udini mantengono la "forma", in particolare trasformano circonferenze in<br />
circonferenze, ... , cioè trasformano una figura geometrica in una figura simi<strong>le</strong> a quella<br />
data.<br />
<strong>Math</strong>.<strong>it</strong> applicazioni didattiche ©2010
Isometrie<br />
Si dice isometria una trasformazione geometrica affine che conserva <strong>le</strong> distanze. Dati due<br />
punti A, B l'isometria fa ad essi corrispondere due punti A' e B' tali che AB = A'B'. Pertanto <strong>le</strong> figure trasformate conservano la forma e la grandezza e dunque risultano<br />
congruenti a quel<strong>le</strong> date.<br />
Sono isometrie <strong>le</strong>:<br />
• Traslazioni<br />
• Rotazioni<br />
• Simmetrie centrali ed assiali.<br />
Traslazione<br />
<br />
Traslazione di vettore v( x0, y0)<br />
è una trasformazione che ad ogni punto P del piano<br />
<br />
associa un punto P ' ta<strong>le</strong> che il vettore PP ' è ugua<strong>le</strong> al vettore v .<br />
x0 y0 sono <strong>le</strong> componenti del vettore v l'espressione anal<strong>it</strong>ica della traslazione è data da:<br />
⎧x<br />
' = x+ x0<br />
⎨ . La matrice della trasformazione è la matrice ident<strong>it</strong>à.<br />
⎩y'=<br />
y+ y0<br />
Se ( , )<br />
Proprietà fondamentali<br />
Si può dimostrare che una traslazione gode del<strong>le</strong> seguenti proprietà:<br />
• la traslazione ident<strong>it</strong>à (traslazione di vettore nullo), ovvero la trasformazione che porta<br />
ogni punto del piano in se stesso, è un particolare tipo di traslazione. Tutti i suoi punti<br />
⎧x<br />
' = x<br />
sono un<strong>it</strong>i. Le sue equazioni sono <strong>le</strong> seguenti: ⎨ ;<br />
⎩y'=<br />
y<br />
• una traslazione diversa dall’ident<strong>it</strong>à non ha punti un<strong>it</strong>i;<br />
• <strong>le</strong> rette paral<strong>le</strong><strong>le</strong> al vettore di traslazione sono rette un<strong>it</strong>e;<br />
• qualunque retta viene trasformata in una retta ad essa paral<strong>le</strong>la;<br />
• una traslazione trasforma una figura geometrica in una figura congruente a quella data,<br />
ma traslata.<br />
Rotazione<br />
La rotazione di centro C e angolo α è la trasformazione che ad ogni punto P del piano<br />
associa un punto P ' ta<strong>le</strong> che PC = P 'C<br />
e l'angolo PCP ˆ ' = α .<br />
Le equazioni anal<strong>it</strong>iche di una rotazione di angolo α in senso antiorario sono:<br />
⎧x'=<br />
xcosα− ysenα<br />
⎨<br />
⎩y'=<br />
xsenα + ycosα<br />
⎛cosα −senα<br />
⎞<br />
2 2<br />
La matrice della trasformazione è A = ⎜ ⎟ dove det A = cos α + sen α = 1.<br />
⎝senα cosα<br />
⎠<br />
Proprietà fondamentali<br />
Si può dimostrare che per una rotazione valgono <strong>le</strong> seguenti proprietà:<br />
• l'origine è l'unico punto un<strong>it</strong>o;<br />
• una rotazione trasforma una figura geometrica in una figura congruente a quella data.<br />
Simmetria centra<strong>le</strong><br />
La simmetria centra<strong>le</strong> di centro C è una trasformazione che ad ogni punto P del piano associa<br />
un punto P ' ta<strong>le</strong> che C è il punto medio del segmento PP ' .<br />
<strong>Math</strong>.<strong>it</strong> applicazioni didattiche ©2010
Considerando la proprietà del<strong>le</strong> coordinate del punto medio, possiamo dedurre dalla<br />
⎧x<br />
'= 2xc−x<br />
definizione <strong>le</strong> equazioni della trasformazione: ⎨<br />
⎩y'=<br />
2yc−y<br />
⎧x<br />
= 2xc−x' o anche <strong>le</strong> equazioni della trasformazione inversa: ⎨<br />
⎩y<br />
= 2yc−y' Com'è evidente la trasformazione e la sua inversa sono formalmente identiche salvo lo<br />
scambio apice ↔ non apice, trattandosi di una trasformazione involutoria.<br />
Proprietà fondamentali<br />
Si può dimostrare che una simmetria centra<strong>le</strong> gode del<strong>le</strong> seguenti proprietà:<br />
• La simmetria centra<strong>le</strong> ha un solo punto un<strong>it</strong>o: il centro C.<br />
• Tutte <strong>le</strong> rette passanti per C sono un<strong>it</strong>e.<br />
• La simmetria centra<strong>le</strong> è un’isometria.<br />
• La simmetria centra<strong>le</strong> è un’isometria diretta.<br />
• La simmetria centra<strong>le</strong> è involutoria.<br />
• Rette che si corrispondono in una simmetria centra<strong>le</strong> sono paral<strong>le</strong><strong>le</strong>.<br />
Simmetria assia<strong>le</strong><br />
La simmetria assia<strong>le</strong> di asse: ax by c 0<br />
piano associa un punto P ' ta<strong>le</strong> che il segmento PP ' è perpendicolare all'asse e il punto<br />
medio M di PP ' appartiene all'asse.<br />
+ + = è una trasformazione che ad ogni punto P del<br />
Esprimendo <strong>le</strong> condizioni imposte dalla definizione nei termini del<strong>le</strong> coordinate, possiamo<br />
dedurre immediatamente <strong>le</strong> equazioni della trasformazione:<br />
⎧ 1<br />
mPP'<br />
=−<br />
⎧PP '⊥ ax + by + c = 0 ⎪<br />
masse<br />
⎨ ⇒ ⎨<br />
⎩MPP' ∈ ax+ by+ c= 0 ⎪ x+ x' y+ y'<br />
a + b + c=<br />
0<br />
⎪⎩ 2 2<br />
Per scrivere <strong>le</strong> equazioni della trasformazione in forma esplic<strong>it</strong>a si dovrà risolvere il sistema<br />
rispetto a x ' e y ' . Per il calcolo dei casi più semplici si consiglia di utilizzare il metodo di<br />
sost<strong>it</strong>uzione, altrimenti è preferibi<strong>le</strong> il metodo di Cramer.<br />
Dal punto di vista anal<strong>it</strong>ico <strong>le</strong> equazioni di una simmetria assia<strong>le</strong> sono del tipo:<br />
⎧x'=<br />
αx+ βy+ γ<br />
2 2<br />
⎨ con α + β = 1<br />
⎩y'=<br />
βx− αy+ δ<br />
In particolare se l'asse passa per l'origine i termini noti si annullano.<br />
Proprietà fondamentali<br />
Si può dimostrare che una simmetria assia<strong>le</strong> gode del<strong>le</strong> seguenti proprietà:<br />
• Tutti i punti dell'asse di simmetria sono un<strong>it</strong>i: l'asse è quindi una retta un<strong>it</strong>a luogo di<br />
punti un<strong>it</strong>i.<br />
• Tutte <strong>le</strong> rette perpendicolari all'asse sono un<strong>it</strong>e, ma non cost<strong>it</strong>u<strong>it</strong>e da punti un<strong>it</strong>i.<br />
• La simmetria assia<strong>le</strong> è involutoria, pertanto <strong>le</strong> equazioni della trasformazione e quel<strong>le</strong><br />
della sua inversa sono formalmente identiche salvo lo scambio apice ↔ non apice<br />
(valgono <strong>le</strong> stesse considerazioni fatte per la simmetria centra<strong>le</strong>)<br />
• La simmetria assia<strong>le</strong> è un’isometria.<br />
• La simmetria assia<strong>le</strong> è un’isometria inversa.<br />
• La simmetria assia<strong>le</strong>, come tutte <strong>le</strong> isometrie, conserva <strong>le</strong> relazioni di perpendicolar<strong>it</strong>à<br />
e paral<strong>le</strong>lismo.<br />
• Si può dimostrare che componendo due simmetrie assiali rispetto ad assi<br />
perpendicolari si ottiene una simmetria centra<strong>le</strong>, con centro nel punto d'intersezione<br />
tra i due assi.<br />
<strong>Math</strong>.<strong>it</strong> applicazioni didattiche ©2010
Simmetrie rispetto ad assi particolari<br />
Nel caso di assi di simmetria particolari (assi cartesiani, rette paral<strong>le</strong><strong>le</strong> agli assi cartesiani o<br />
bisettrici dei quadranti) non è necessario ricorrere alla definizione per ottenere <strong>le</strong> equazioni<br />
della simmetria assia<strong>le</strong>, ma è sufficiente visualizzare graficamente la s<strong>it</strong>uazione per ottenere i<br />
risultati riportati nella seguente tabella:<br />
Rispetto all’asse del<strong>le</strong> ascisse ( y = 0 )<br />
⎧x<br />
' = x<br />
⎨<br />
⎩y'=−y<br />
Rispetto all’asse del<strong>le</strong> ordinate ( x = 0 )<br />
⎧x<br />
' =−x<br />
⎨<br />
⎩y'=<br />
y<br />
Rispetto ad una retta paral<strong>le</strong>la all’asse del<strong>le</strong> ascisse ( y = k )<br />
⎧x'=<br />
x<br />
⎨<br />
⎩y'=−<br />
y+ 2k<br />
Rispetto ad una retta paral<strong>le</strong>la all’asse del<strong>le</strong> ordinate ( x = h )<br />
⎧x<br />
'=− x+ 2h<br />
⎨<br />
⎩y'=<br />
y<br />
Rispetto alla bisettrice I, III ( y = x)<br />
⎧x<br />
' = y<br />
⎨<br />
⎩y'=<br />
x<br />
Rispetto alla bisettrice II, IV ( y =− x)<br />
⎧x<br />
' =−y<br />
⎨<br />
⎩y'=−x<br />
<strong>Math</strong>.<strong>it</strong> applicazioni didattiche ©2010
Omotetie<br />
Dato un punto O nel piano ed un numero rea<strong>le</strong> k ≠ 0 , la trasformazione T che ad ogni punto<br />
OP '<br />
P del piano fa corrispondere il punto P ' , allineato con O e P , ta<strong>le</strong> che sia: = k è detta<br />
OP<br />
omotetia di centro O e rapporto k .<br />
O si dice centro di omotetia. La costante k è detta rapporto di omotetia.<br />
• Se il centro dell’omotetia O coincide con l’origine degli assi, <strong>le</strong> equazioni anal<strong>it</strong>iche<br />
⎧x<br />
' = kx<br />
dell’omotetia sono: ⎨ .<br />
⎩y'=<br />
ky<br />
⎛k0⎞ 2<br />
La matrice della trasformazione è data da A = ⎜ ⎟,<br />
dove det A= k .<br />
⎝0k⎠ C a b non coincide con l’origine degli assi, <strong>le</strong> equazioni<br />
• Se il centro dell’omotetia ( , )<br />
anal<strong>it</strong>iche dell’omotetia sono:<br />
( )<br />
( )<br />
⎪⎧<br />
x '= kx+ a 1−k<br />
⎨<br />
⎪⎩ y'= ky+ b 1−k<br />
Casi oarticolari:<br />
• se k > 0 l'omotetia si dice diretta. P e P' si trovano dalla stessa parte rispetto ad O;<br />
• se k < 0 l'omotetia si dice inversa. P e P' si trovano da parti opposte rispetto ad O;<br />
• se k = 1 si ha l'ident<strong>it</strong>à;<br />
• se k =− 1 si ha la simmetria rispetto all'origine.<br />
Proprietà fondamentali.<br />
Si può dimostrare che un'omotetia gode del<strong>le</strong> seguenti proprietà:<br />
• l'omotetia trasforma una retta in una retta paral<strong>le</strong>la alla retta data;<br />
• <strong>le</strong> rette che passano per il centro di omotetia sono rette un<strong>it</strong>e;<br />
• l'omotetia è una simil<strong>it</strong>udine;<br />
• se k ≠ 1 il centro di omotetia è l'unico punto un<strong>it</strong>o;<br />
• l'omotetia trasforma una figura geometrica in una figura simi<strong>le</strong> a quella data;<br />
• se la figura S ' è l'immagine corrispondente di una figura S , allora<br />
<strong>Math</strong>.<strong>it</strong> applicazioni didattiche ©2010<br />
.<br />
Area ( S ')<br />
Area ( S )<br />
2<br />
= k .