Sensor fusion and state estimation in mobile robotics (PDF, 2.5Mb ...
Sensor fusion and state estimation in mobile robotics (PDF, 2.5Mb ...
Sensor fusion and state estimation in mobile robotics (PDF, 2.5Mb ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Ε.Μ.Π., ΣΗΜΜΥ, Ακαδημαϊκό Έτος 2010-11, 8ο Εξάμηνο<br />
Μάθημα: Ρομποτική ΙΙ. Διδάσκων: Κ.Τζαφέστας<br />
ΕΝΟΤΗΤΑ 2:<br />
Αυτόνομα Ευφυή Κινούμενα<br />
Ρομποτικά Συστήματα<br />
Σύνθεση αισθητηριακών πληροφοριών<br />
(data / sensor <strong>fusion</strong>)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Αυτόνομα Ευφυή Κινούμενα Ρομπότ<br />
– Περιεχόμενα Ενότητας<br />
• Μηχανισμοί Κίνησης στο χώρο (locomotion)<br />
• Αισθητήριες Διατάξεις (sens<strong>in</strong>g)<br />
– Proprioception (<strong>in</strong>ternal <strong>state</strong> ) / Exteroception etc.<br />
– Σύνθεση αισθητηριακών πληροφοριών (sensor <strong>fusion</strong>)<br />
• Αρχιτεκτονικές ελέγχου<br />
(<strong>mobile</strong> robot control architectures)<br />
• Αυτοεντοπισμός θέσης / Χαρτογράφηση<br />
(self-localisation / map-build<strong>in</strong>g)<br />
• Σχεδιασμός Δρόμου - Πλοήγηση<br />
(path plann<strong>in</strong>g / navigation)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
perception<br />
action<br />
1<br />
motion<br />
control<br />
sens<strong>in</strong>g<br />
reason<strong>in</strong>g<br />
2
Σύνθεση αισθητηριακών πληροφοριών<br />
(sensor <strong>fusion</strong>) – Εισαγωγή (1)<br />
Βασικό Πρόβλημα:<br />
Εκτίμηση ενός φυσικού μεγέθους (π.χ. θέση x του ρομπότ) συνδυάζοντας<br />
n διαφορετικές ενδείξεις {z i } (i=1,...,n) (π.χ. από διαφορετικούς αισθητήρες)<br />
Έστω ότι όλες οι μετρήσεις zi έχουν την ίδια «αξιοπιστία», και έστω ότι<br />
κάθε μέτρηση είναι το αποτέλεσμα μιας στοχαστικής (Gaussian)<br />
διαδικασίας με μέση τιμή zi και διασπορά σ 2<br />
i = σταθ. για όλα τα i.<br />
Τότε έχουμε πολύ απλά για την «συνολική εκτίμηση» της μεταβλητής x:<br />
2<br />
2<br />
(unweighted averag<strong>in</strong>g) ˆ σ = i<br />
και<br />
(1)<br />
ˆ = i<br />
n<br />
∑z x<br />
σ<br />
n<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Σύνθεση αισθητηριακών πληροφοριών<br />
(sensor <strong>fusion</strong>) – Εισαγωγή (2)<br />
Έστω ότι όλες οι μετρήσεις z i δεν έχουν την ίδια «αξιοπιστία», δηλαδή ότι<br />
για κάθε μέτρηση z i αντιστοιχεί διαφορετική διασπορά (variance) σ i 2<br />
Τότε για την «συνολική εκτίμηση» ˆx της μεταβλητής x: πρέπει κάθε<br />
μέτρηση να ληφθεί υπ’όψη με διαφορετική βαρύτητα, δηλ. να αθροιστεί<br />
με κατάλληλο βάρος, για τον υπολογισμό μιας «ανισοβαρούς βέλτιστης<br />
μέσης τιμής» (weighted mean – σταθμισμένος μέσος).<br />
Απλό Παράδειγμα –1<br />
Έστω ότι αποκτούμε σειριακά δύο μετρήσεις, z 1 (τη χρονική στιγμή t 1 ) και<br />
z 2 (τη χρονική στιγμή t 2 ≅t 1 ) με τυπική απόκλιση σ z1 και σ z2 αντίστοιχα.<br />
( )<br />
Έχουμε: ˆ ⎛t ⎞<br />
⎜ 1⎟= E x| z1=<br />
και<br />
⎝ ⎠ 1<br />
Με την υπόθεση της Gaussian κατανομής, μπορούμε να υπολογίσουμε μια<br />
συνολική βέλτιστη εκτίμηση, με δεδομένη και τη μέτρηση z2 , ως εξής:<br />
x z ˆ σ ⎛t⎞ ⎜ 1⎟ σ<br />
⎝ ⎠ z1<br />
=<br />
σ σ<br />
2 2<br />
xˆ⎛t⎞ z2 z1<br />
⎜ 2 ⎟=<br />
⋅ z 2 2 1+ ⋅z<br />
⎝ ⎠ 2 2 2<br />
σz1+ σz2 σz1+ σz2<br />
και<br />
1 = 1 + 1<br />
σ σ σ<br />
( t )<br />
2 2 2<br />
ˆ 2 z1 z2<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
(2)<br />
3<br />
4
Σύνθεση αισθητηριακών πληροφοριών<br />
(sensor <strong>fusion</strong>) – Εισαγωγή (3)<br />
Απλό Παράδειγμα –1 (συνέχεια)<br />
ˆ ⎛t⎞ ⎜ 1⎟ ⎝ ⎠ 1<br />
Η παραπάνω σχέση (2) γράφεται επίσης ως εξής :<br />
= x z<br />
ˆ σ ⎛t⎞ ⎜ 1⎟ σ z1<br />
και:<br />
⎛t ⎞ ⎛<br />
2 t ⎞<br />
1 K⎛ ⎛<br />
⎛ ⎞<br />
⎞<br />
t ⎞<br />
⎜ ⎟= ⎜ ⎟+ ⎜ 2⎟⎜ 2− ⎜t ⎟<br />
⎜ 1⎟<br />
⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎟<br />
⎝ ⎠<br />
xˆ xˆ z xˆ<br />
όπου:<br />
Kt<br />
⎛ ⎞<br />
⎜ 2 ⎟<br />
⎝ ⎠ =<br />
σ<br />
σ σ<br />
2<br />
z1<br />
2 2<br />
z1+ z2<br />
2⎛ 2 2<br />
t ⎞ ⎛<br />
2 t ⎞<br />
1 K⎛t ⎞ ⎛<br />
2 t ⎞<br />
⎜ ⎟= ⎜ ⎟− ⎜ ⎟ ⎜ 1⎟<br />
⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠<br />
ˆ σ ˆ σ ˆ σ<br />
(3)<br />
⎝ ⎠ =<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Σύνθεση αισθητηριακών πληροφοριών<br />
(sensor <strong>fusion</strong>) – Εισαγωγή (4)<br />
μ z1K z1, z ⎛ ⎞<br />
2 ⎜ 2 1⎟<br />
⎝ ⎠<br />
xˆ = = + ( ) z −z<br />
όπου:<br />
και:<br />
2<br />
K(<br />
z z )<br />
σ z<br />
2<br />
1<br />
1, 2 = 2 2<br />
σ z1+ σ z2<br />
ˆ σ = ˆ σ −K(<br />
) ˆ σ<br />
2 2<br />
z1 z1, z2<br />
z1<br />
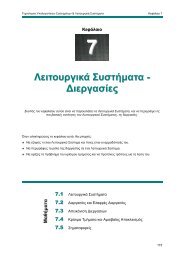
Απλό Παράδειγμα –1 (συνέχεια)<br />
Γραφική απεικόνιση – Συνδυασμός<br />
δύο μετρήσεων z 1 και z 2<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
5<br />
6
Σύνθεση αισθητηριακών πληροφοριών<br />
(sensor <strong>fusion</strong>) – Εισαγωγή (5)<br />
Απλό Παράδειγμα –1 (συνέχεια)<br />
Εισάγουμε τώρα μια απλή δυναμική συμπεριφορά (πεδίο του χρόνου) στο<br />
σύστημα:<br />
dx/dt = u + w<br />
όπου u σήμα ελέγχου που αντιστοιχεί στην ονομαστική ταχύτητα του ρομπότ,<br />
και w σήμα θορύβου που οφείλεται στην ύπαρξη αβεβαιότητας (διαταραχών)<br />
στην πραγματική κίνηση του ρομποτικού συστήματος. Υποθέτουμε συνήθως<br />
ότι το w μοντελοποιείται ως «λευκός Γκαουσσιανός θόρυβος»: (0,σ w 2 ).<br />
−<br />
xˆ t = xˆ<br />
t + u t −t<br />
⎛ ⎞<br />
⎜ 3 ⎟<br />
⎝ ⎠<br />
⎛ ⎞<br />
⎜ 2 ⎟<br />
⎝ ⎠<br />
⎛<br />
⎜<br />
⎝ 3<br />
⎞<br />
2⎟<br />
⎠<br />
2⎛ − ⎞<br />
⎜t3⎟= ⎝ ⎠<br />
2⎛t<br />
⎞<br />
⎜ 2 ⎟+<br />
⎝ ⎠<br />
2 ⎛ ⎞<br />
⎜t3−t2⎟ ⎝ ⎠<br />
ˆ σ ˆ σ σw<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Σύνθεση αισθητηριακών πληροφοριών<br />
(sensor <strong>fusion</strong>) – Εισαγωγή (6)<br />
t=t 3 – :<br />
t=t 3 :<br />
(4)<br />
−<br />
xˆ t = xˆ<br />
t + u t −t<br />
⎛ ⎞ ⎛ ⎞ ⎛ ⎞<br />
⎜ 3 ⎟ ⎜ 2 ⎟ ⎜ 3 2⎟<br />
⎝ ⎠ ⎝ ⎠ ⎝ ⎠<br />
2⎛ − ⎞ 2 2<br />
t ⎛<br />
3 t ⎞ ⎛ ⎞<br />
⎜ ⎟= ⎜ 2 ⎟+<br />
⎜t3−t2⎟ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠<br />
ˆ σ ˆ σ σw<br />
⎛ ⎞<br />
⎛t ⎞ ⎛ −⎞ 3 t3 K⎛ ⎛ ⎞ t ⎞ −<br />
⎜ ⎟= ⎜ ⎟+ ⎜ ⎜<br />
3⎟<br />
3−<br />
⎜t ⎟<br />
3 ⎟<br />
⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎜ ⎝ ⎠⎟<br />
⎝ ⎠<br />
xˆ xˆ z xˆ<br />
2⎛ 2 2<br />
t ⎞ ⎛ −⎞ 3 t3 K⎛ ⎛ ⎞<br />
t ⎞ −<br />
⎜ ⎟= ⎜ ⎟− ⎜ 3⎟<br />
⎜t3 ⎟<br />
⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠<br />
ˆ σ ˆ σ ˆ σ<br />
όπου:<br />
2 ⎛ − ⎞ ˆ σ ⎜t3⎟ ⎛ ⎞ ⎝ ⎠<br />
⎜ 3 ⎟=<br />
⎝ ⎠ ⎡ 2 − 2<br />
ˆ σ ⎛ ⎤<br />
t ⎞<br />
⎢ ⎜ 3 ⎟+<br />
σ<br />
⎝ ⎠ z3⎥<br />
⎣ ⎦<br />
Kt<br />
Αρχική πρόβλεψη στη χρονική στιγμή t 3 –<br />
⎛ − ⎞<br />
⎜ 3 ⎟<br />
⎝ ⎠<br />
xˆ<br />
t<br />
2 ⎛ − ⎞<br />
⎜ 3 ⎟<br />
⎝ ⎠<br />
, ˆ σ t<br />
Νέα μέτρηση z 3<br />
Βασική δομή αναδρομικού φίλτρου<br />
Kalman στο διακριτό χρόνο, για τον<br />
αναδρομικό υπολογισμό σε κάθε<br />
χρονική στιγμή της νέας «βέλτιστης»<br />
εκτίμησης, και των στοχαστικών<br />
ιδιοτήτων αυτής (διασπορά)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
7<br />
8
Σύνθεση αισθητηριακών πληροφοριών<br />
– Φίλτρο Kalman – Εισαγωγή (1)<br />
Φίλτρο Kalman: αναδρομικός αλγόριθμος εκτίμησης της κατάστασης ενός<br />
συστήματος (recursive <strong>state</strong>-<strong>estimation</strong>), χρησιμοποιώντας γραμμικό δυναμικό<br />
μοντέλο της συμπεριφοράς του συστήματος (l<strong>in</strong>ear plant model) καθώς και<br />
μοντέλο της λειτουργίας των αισθητήρων (sensor/measurement model).<br />
Συμβολισμοί/Ορολογία<br />
xˆ<br />
( kk | )<br />
1<br />
: εκτίμηση κατάστασης στη χρονική στιγμή k, χρησιμοποιώντας<br />
δεδομένα μετρήσεων μέχρι και τη χρονική στιγμή k 1<br />
⎛ ⎞<br />
x() k ⎜ηήxˆ() − ⎟=<br />
xˆ(<br />
k| k−1)<br />
⎝ k ⎠<br />
(prediction)<br />
⎛ ⎞<br />
xˆ( k) ⎜ηήxˆ( k + ) ⎟=<br />
xˆ(<br />
k| k)<br />
⎝ ⎠<br />
(updated estimate)<br />
: πρόβλεψη κατάστασης τη στιγμή k,<br />
χρησιμοποιώντας δεδομένα μετρήσεων<br />
μέχρι και τη χρονική στιγμή k-1<br />
: νέα (ανανεωμένη) εκτίμηση κατάστασης<br />
τη στιγμή k, χρησιμοποιώντας δεδομένα<br />
μετρήσεων μέχρι και τη χρονική στιγμή k<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Σύνθεση αισθητηριακών πληροφοριών<br />
– Φίλτρο Kalman – Εισαγωγή (2)<br />
Μοντέλο μετρήσεων (ή μοντέλο αισθητήρων):<br />
[ ξ]<br />
z( k) = hx( k), + v ( k)<br />
(measurement/sensor model)<br />
noise function, with covariance matrix C v<br />
model of the environment<br />
Γραμμικό μοντέλο μετρήσεων: z( k) = H⋅<br />
x( k) + v(<br />
k)<br />
Μοντέλο συστήματος (plant model):<br />
[ ]<br />
x( k+ 1) = Φ x( k), u( k) + w(<br />
k)<br />
<strong>state</strong> transition function<br />
noise function, covariance matrix C w<br />
control <strong>in</strong>put<br />
Γραμμικό μοντέλο συστήματος: x( k+ 1) = A⋅ x( k) + B⋅<br />
u( k) + w(<br />
k)<br />
(6)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
(5)<br />
9<br />
10
Σύνθεση αισθητηριακών πληροφοριών:<br />
Determ<strong>in</strong>istic Least-Squares <strong>estimation</strong><br />
z = H⋅<br />
x+ v (z: διάνυσμα l x 1, x: διάνυσμα n x 1)<br />
Εαν l ≥ n τότε:<br />
( ) 1 −<br />
⎡ T T⎤<br />
xˆ= H<br />
⎢⎣ ⋅H ⋅H ⋅z<br />
⎥⎦<br />
least-squares estimate<br />
⇒ m<strong>in</strong>ℑ<br />
1 =<br />
T<br />
z −H⋅xˆ z−H⋅xˆ ( ) 1 −<br />
( ) ( )<br />
⎡ T -1 T -1⎤<br />
ˆ = HRH<br />
⎢⎣ HR ⋅<br />
⎥⎦<br />
⇒ m<strong>in</strong>ℑ<br />
2 =<br />
T −1<br />
z −H⋅xˆ R z−H⋅xˆ x z weighted least-squares estimate<br />
( ) ( )<br />
Determ<strong>in</strong>istic optimal (<strong>in</strong> the least-squared sense) solutions:<br />
no probability density function associated with x <strong>and</strong> z<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Σύνθεση αισθητηριακών πληροφοριών:<br />
Maximum-Likelihood Estimation<br />
z = H⋅<br />
x+ v<br />
Maximum-likelihood estimate ˆx<br />
ˆx : μεγιστοποιεί την πιθανότητα p(z | x), δεδομένων των στατιστικών<br />
ιδιοτήτων του σήματος θορύβου v στις μετρήσεις των αισθητήρων<br />
Εαν υποθέσουμε κανονική (Gaussian) κατανομή για το θόρυβο v, με<br />
μηδενική μέση τιμή και μήτρα διακύμανσης (covariance) R, τότε:<br />
1<br />
( | )<br />
/2 1/2<br />
(2 ) l<br />
p z x = ⋅e<br />
π R<br />
T<br />
( z H x −1<br />
) R ( z H x)<br />
1<br />
⎡ ⎤<br />
−<br />
2⎢<br />
− ⋅ − ⋅ ⎥<br />
⎣ ⎦<br />
T −1<br />
[ p z x ] ⇔ ( z − H⋅x) R ( z−H⋅x) max ( | ) m<strong>in</strong> ⎡ ⎤<br />
⎣ ⎦<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
(7)<br />
(8)<br />
p(z | x) ακολουθεί την κατανομή πιθανότητας p(v)<br />
⇔ (8)<br />
Άρα εδώ: maximum-likelihood estimate ≡ weighted least-squares estimate<br />
11<br />
12
Σύνθεση αισθητηριακών πληροφοριών:<br />
M<strong>in</strong>imum-Variance Bayesian Estimate<br />
p( z | x) p(<br />
x)<br />
p(<br />
xz | ) =<br />
p(<br />
z)<br />
: Bayes theorem<br />
(a-posteriori conditional density function)<br />
( p(x), p(z) : a-priori probability density functions )<br />
M<strong>in</strong>imum-variance Bayes’ estimate ˆx<br />
ˆx : ελαχιστοποιεί το συναρτησιακό:<br />
∞ ∞ ∞<br />
T<br />
m<strong>in</strong> ℑ= ... x−xˆ x−xˆ p( x| z)<br />
dx1dx2... dxn<br />
∫ ∫ ∫ S<br />
−∞ −∞ −∞<br />
( ) ( )<br />
Ex<br />
{ (<br />
T<br />
ˆ) S(<br />
ˆ)<br />
}<br />
δηλαδή: ℑ= variance( xz | ) = x−x x−x| z<br />
(διακύμανση) (S: θετικά ορισμένη μήτρα nxn)<br />
∫∫ ∫<br />
απ’όπου παίρνουμε: xˆ = ... x⋅p( x| z) ⋅ dx1dx2…dx = E ( x| z)<br />
n x<br />
και εάν x και v ακολουθούν κανονική (Gaussian) κατανομή, έχουμε:<br />
( ) 1<br />
−1 T −1 −<br />
T −1<br />
xˆ= ⎡ P ⎤<br />
0 + H R H H R ⋅z<br />
⎢⎣ ⎥⎦<br />
όπου P (9)<br />
0 : a-priori covariance<br />
matrix of x = cov(x)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Σύνθεση αισθητηριακών πληροφοριών:<br />
Αναδρομικά φίλτρα (recursive l<strong>in</strong>ear filters)<br />
Απλό Παράδειγμα-2: Εκτίμηση του βαθμωτού μεγέθους<br />
x στη βάση k μετρήσεων: z i=h⋅x+v i (i=1,…,k)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
−1<br />
k<br />
k i=<br />
1<br />
i<br />
⇒ xˆ ( k) = h<br />
∑z<br />
νέα μέτρηση zk+1 −1k+ 1<br />
xˆ( k+ 1) = h z<br />
k+ 1∑ i<br />
i= 1<br />
⇒<br />
⎛ −1 k ⎞ −1<br />
xˆ( k 1) k ⎜h ⎟<br />
+ = z h<br />
⎜ ⎟ k 1<br />
k 1 k i z +<br />
+ ∑ +<br />
⎜ ⎟<br />
i 1 ⎟ k 1<br />
⎝ = +<br />
⎠<br />
⇒<br />
−1<br />
xˆ( k+ 1) = k xˆ( k)<br />
+ h z k+<br />
1<br />
k+ 1 k+<br />
1<br />
1<br />
ˆ( k 1) ˆ( k) k 1 ˆ(<br />
k)<br />
k 1<br />
h<br />
ή<br />
−<br />
x + = x + z + −h⋅x +<br />
⎛ ⎞<br />
⎜ ⎟<br />
⎝ ⎠<br />
Γενικεύοντας για διανυσματικά μεγέθη z i , x: z i=H i⋅x+v i (i=1,…,k) και<br />
εισάγοντας και δυναμική στο χώρο κατάστασης: x k+1 = Ax k + Bu k + w k<br />
xˆ( k+ 1) = xˆ( k+ 1| k) + K z −H⋅xˆ( k+ 1| k)<br />
όπου:<br />
⎛ ⎞<br />
k+<br />
1⎜<br />
k 1 k 1<br />
⎟<br />
⎝ + +<br />
⎠<br />
xˆ( k+ 1| k) = A⋅xˆ( k)<br />
+ B⋅uk<br />
(10)<br />
13<br />
14
Σύνθεση αισθητηριακών πληροφοριών<br />
– Φίλτρο Kalman (1)<br />
Φίλτρο Kalman – Υποθέσεις (assumptions)<br />
1. Γραμμικό μοντέλο συστήματος:<br />
xˆ( k+ 1| k) = A⋅xˆ( k)<br />
+ B⋅uk<br />
x( k+ 1) = A⋅ x( k) + B⋅<br />
u( k) + w(<br />
k)<br />
2. Γραμμικό μοντέλο μετρήσεων: z( k) = H ⋅ x( k) + v(<br />
k)<br />
3. Θόρυβος συστήματος: Γκαουσιανός, λευκός, με μηδενική μέση τιμή E[wk ]=0,<br />
T<br />
και ασυσχέτιστος (uncorrelated) covariance matrix: C ( k ) = E[(<br />
w )( w ) ]<br />
(l<strong>in</strong>ear plant model)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
k<br />
(K-1)<br />
Έστω: ⎧ T ⎫<br />
P( k) = E⎨e( k) ⋅e<br />
( k)<br />
⎬(<strong>state</strong><br />
covariance matrix) όπου: e( k) = x( k) − xˆ(<br />
k)<br />
(K-1)<br />
⎩ ⎭<br />
⎧ T ⎫<br />
Ποιό το: P( k+ 1| k) = E⎨e( k+ 1| k) ⋅ e ( k+ 1| k)<br />
⎬ όπου: e( k+ 1| k) = x( k+ 1) − xˆ(<br />
k+ 1| k)<br />
⎩ ⎭<br />
w k k<br />
T<br />
4. Αντίστοιχα για το θόρυβο μετρήσεων v(k), E[vk ]=0, C ( k ) = R = E[(<br />
v )( v ) ]<br />
Είναι:<br />
⎧<br />
⎪ ( k+ 1| k) = E ⎛<br />
⎨⎜ ⎪⎝ ⎩<br />
( k+ 1) − ˆ( k+ 1| k) ⎞ ⎛<br />
⎟⋅ ⎜<br />
⎠ ⎝<br />
T ⎫<br />
⎪<br />
( k+ 1) − ˆ(<br />
k+ 1| k)<br />
⎞<br />
⎟ ⎬<br />
⎠ ⎪⎭<br />
( k+ 1) = A⋅ ( k)<br />
+ B⋅<br />
k + k k k k<br />
P x x x x<br />
v k k k<br />
Σύνθεση αισθητηριακών πληροφοριών<br />
– Φίλτρο Kalman (2)<br />
όπου: x x u w και: xˆ( + 1| ) = A⋅xˆ( ) + B⋅uk<br />
Άρα:<br />
⎧ T ⎫<br />
⎪⎡ ⎛ ˆ ⎞ ⎤ ⎡ ⎛ ⎤ ⎪<br />
k ˆ ⎞<br />
⎨⎢ ⎜x x ⎟ w ⎥ ⎢ ⎜x x ⎟ wk⎥<br />
⎬<br />
⎪⎣ ⎝ ⎠ ⎦ ⎣ ⎝ ⎠ ⎦<br />
⎩ ⎪⎭<br />
P( k+ 1| k) = E A ( k) − ( k) + ⋅ A ( k) − ( k)<br />
+<br />
T<br />
⇒ + = ⋅ ⋅ +<br />
P( k 1| k) A P( k) A C ( k)<br />
(<strong>state</strong> covariance matrix) (K-2)<br />
: Μήτρα συνδιακύμανσης της πρόβλεψης<br />
w<br />
υποδηλώνει πώς εξελίσσεται χρονικά η διακύμανση της μεταβλητής<br />
κατάστασης του συστήματος, δηλαδή πώς μεταβάλλεται η «αξιοπιστία» της<br />
εκτίμησης την οποία έχουμε σε κάθε k για την τρέχουσα κατάσταση x k του<br />
συστήματος, χωρίς νέα δεδομένα ανάδρασης z k (corrective feedback).<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
15<br />
16
Σύνθεση αισθητηριακών πληροφοριών<br />
– Φίλτρο Kalman (3)<br />
Νέα ανανεωμένη εκτίμηση της κατάστασης (updated estimate) χρησιμοποιώντας<br />
δεδομένα ανάδρασης (μετρήσεις) και από τη χρονική στιγμή k+1:<br />
xˆ( k+ 1) = xˆ( k+ 1| k) + K z −H⋅xˆ( k+ 1| k)<br />
⎛ ⎞<br />
k+<br />
1⎜<br />
k 1 k 1<br />
⎟<br />
⎝ + +<br />
⎠<br />
r(k+1)<br />
r(k+1): <strong>in</strong>novation, difference between actual sensor read<strong>in</strong>g :<br />
<strong>and</strong> predicted sensor data :<br />
(K-3)<br />
zk+<br />
1<br />
Hk 1 ⋅xˆ<br />
( k+ 1| k)<br />
Εύρεση βέλτιστου κέρδους ανάδρασης του φίλτρου (Kalman ga<strong>in</strong>) K k+1<br />
Υπολογισμός της νέας μήτρας διακύμανσης P(k+1) για την ανανεωμένη<br />
εκτίμηση xˆ<br />
( k + 1) της κατάστασης του συστήματος<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Σύνθεση αισθητηριακών πληροφοριών<br />
– Φίλτρο Kalman (4)<br />
Εύρεση βέλτιστου κέρδους ανάδρασης του φίλτρου (Kalman ga<strong>in</strong>) K k+1<br />
[ ]<br />
m<strong>in</strong> ℑ = E ⎡<br />
⎣e e ⎤<br />
⎦= trace P<br />
k+ 1<br />
T<br />
k+ 1 k+ 1 k+<br />
1<br />
Είναι: P( k+ 1) = E e( k+ 1) ⋅ e ( k+<br />
1) όπου: e( k+ 1) = x( k+ 1) − xˆ(<br />
k+<br />
1)<br />
⎡ T ⎤<br />
⎢ ⎥<br />
⎣ ⎦<br />
Δεδομένου ότι από την (Κ3): xˆ( k+ 1) = ( − K H ) xˆ(<br />
k+ 1| k)<br />
+ K<br />
έχουμε: e( k+ 1) = ( I−<br />
Kk+ 1Hk+ 1) e( k+ 1| k) + Kk+ 1( Hk+<br />
1x( k+<br />
1) −zk+<br />
1)<br />
Άρα:<br />
I z<br />
k+ 1 k+ 1 k+ 1 k+<br />
1<br />
<br />
vk+<br />
1<br />
T<br />
⎡ ⎤ ⎡ ⎤<br />
T<br />
⎢⎣ k+ 1 k+ 1 ⋅ ⋅<br />
⎥⎦ ⎢⎣ k+ 1 k+ 1⎥⎦ k+ 1 k+<br />
1 k+<br />
1<br />
P( k+ 1) = I−K H P( k+ 1| k)<br />
I− K H + K R K<br />
Ισχύει όμως:<br />
∂<br />
∂<br />
T<br />
⎡ ⎤<br />
A ⎣ ⎦=<br />
2 ABA AB , όταν: BT =B (δηλ.: B συμμετρική μήτρα)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
+<br />
(K-4)<br />
17<br />
18
Σύνθεση αισθητηριακών πληροφοριών<br />
– Φίλτρο Kalman (5)<br />
Εύρεση βέλτιστου κέρδους ανάδρασης του φίλτρου Kalman (συνέχεια)<br />
T<br />
m<strong>in</strong> ℑ k+ 1= E⎡ ⎣ek+ 1ek+ 1⎤ ⎦ = trace[<br />
Pk+<br />
1]<br />
Άρα πρέπει: ∂ { trace [ ( k 1) ] }<br />
∂ K P + = 0<br />
k+<br />
1 <br />
ℑk+<br />
1<br />
( ) ⋅⎡ ( k 1| k)<br />
⎤⋅<br />
⎢ ⎥ ( )<br />
και από τη σχέση (Κ-4):<br />
T<br />
k+ 1 k+ 1 ⎣ ⎦ k+ 1 k+ 1 k+<br />
1<br />
−2I− K H P + H + 2K<br />
R = 0<br />
−1<br />
T ⎡ T<br />
⎤<br />
k+ 1= ( k+ 1| k) ⋅ k+ 1⋅⎢k+ 1 ( k+ 1| k)<br />
k+ 1+<br />
k 1⎥<br />
⎣ + ⎦<br />
K P H H P H R (K-5)<br />
Bέλτιστο κέρδος ανάδρασης (optimal Kalman ga<strong>in</strong>)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Σύνθεση αισθητηριακών πληροφοριών<br />
– Φίλτρο Kalman (6)<br />
Υπολογισμός της νέας μήτρας διακύμανσης P(k+1) για την ανανεωμένη<br />
εκτίμηση xˆ<br />
( k + 1) της κατάστασης του συστήματος<br />
Από τη σχέση (Κ-4):<br />
T<br />
⎡ ⎤ ⎡ ⎤<br />
T<br />
⎢⎣ k+ 1 k+ 1 ⋅ ⋅<br />
⎥⎦ ⎢⎣ k+ 1 k+ 1⎥⎦ k+ 1 k+<br />
1 k+<br />
1<br />
P( k+ 1) = I−K H P( k+ 1| k)<br />
I− K H + K R K<br />
Αντικαθιστώντας την (Κ-5):<br />
( k+ 1) = − ( k+ 1| k)<br />
P I K H P (K-4)’<br />
⎡ ⎤<br />
⎢⎣ k+ 1 k+<br />
1⎥⎦<br />
⋅<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
19<br />
20
Σύνθεση αισθητηριακών πληροφοριών –<br />
Φίλτρο Kalman: Σύνοψη<br />
Αρχική εκτίμηση x ˆ( k = 0) με C ( )<br />
μέ<br />
w k<br />
xˆ( k+ 1| k) = A⋅xˆ( k)<br />
+ B⋅u<br />
k (l<strong>in</strong>ear plant model) (K-1)<br />
T<br />
P( k+ 1| k) = A⋅ P( k) ⋅A<br />
+ C w(<br />
k)<br />
(<strong>state</strong> covariance matrix) (K-2)<br />
Νέα ανανεωμένη εκτίμηση κατάστασης και μήτρα διακύμανσης<br />
xˆ( k+ 1) = xˆ( k+ 1| k) + K z −H⋅x ˆ(<br />
k+ 1| k)<br />
(K-3)<br />
⎡ ⎤<br />
⎢⎣ k+ 1 k+<br />
1⎥⎦<br />
⋅<br />
και C ( k ) = R , ( = 1, …)<br />
v k k<br />
⎛ ⎞<br />
k+<br />
1⎜<br />
k 1 k 1<br />
⎟<br />
⎝ + +<br />
⎠<br />
P( k+ 1) = I−K H P ( k+ 1| k)<br />
(K-4)’<br />
όπου, βέλτιστο κέρδος ανάδρασης (optimal Kalman ga<strong>in</strong>)<br />
−1<br />
T ⎡ T<br />
⎤<br />
k+ 1= ( k+ 1| k) ⋅ k+ 1⋅⎢k+ 1 ( k+ 1| k)<br />
k 1 k 1⎥<br />
⎣<br />
+ + + ⎦<br />
K P H H P H R (K-5)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Σύνθεση αισθητηριακών πληροφοριών<br />
– Παραδείγματα<br />
Παράδειγμα 1<br />
Έστω ολονομικό (omni-directional) ρομπότ πάνω στο επίπεδο -xy<br />
Το διάνυσμα κατάστασης του ρομπότ είναι: x(k) = [ x(k), y(k) ] T<br />
Το διάνυσμα σημάτων ελέγχου είναι: u(k) = [ Δx(k), Δy(k)] T<br />
Η εξίσωση κατάστασης είναι:<br />
(δηλαδή, Α=Ι)<br />
⎡x( k) +Δ x( k) + wx( k)<br />
⎤<br />
x(<br />
k + 1) =<br />
⎢yk ( ) +Δ yk ( ) + wy( k)<br />
⎥<br />
⎣ ⎦<br />
Έστω ότι το ρομπότ διαθέτει αισθητήρα που παρέχει μια μέτρηση της<br />
θέσης [x(k),y(k)] του ρομπότ από ένα σημείο αναφοράς [0,0]<br />
x( k) + vx( k) 1 0 xk ( ) vx( k)<br />
( k)<br />
=<br />
⎡ ⎤ ⎡ ⎤⎡<br />
⎤ ⎡ ⎤<br />
Δηλαδή: z<br />
= +<br />
⎢⎣yk ( ) + vy( k) ⎥⎦ ⎢⎣0 1⎥⎦⎢⎣yk<br />
( ) ⎥⎦<br />
⎢⎣vy( k)<br />
⎥<br />
(Π.1-2)<br />
⎦<br />
<br />
Hk<br />
x(<br />
k ) v(<br />
k )<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
(Π.1-1)<br />
21<br />
22
Σύνθεση αισθητηρίων πληροφοριών<br />
– Παραδείγματα (συνέχεια) (1)<br />
Παράδειγμα 1 (συνέχεια)<br />
Έστω C w (k)= C w =σταθ. και C v (k)=R=C v =σταθ.<br />
Έχουμε, εφαρμόζοντας το αναδρομικό φίλτρο Kalman:<br />
με<br />
xˆ( k) + Δx(<br />
k)<br />
xˆ(<br />
k+ 1| k)<br />
=<br />
⎡ ⎤<br />
⎢⎣yk ˆ( ) +Δyk<br />
( ) ⎥⎦<br />
(Π.1-3)<br />
P( k+ 1| k) A P( k) ⋅ A C ( k) = P( k)<br />
C<br />
T<br />
= ⋅ + w + w<br />
Βέλτιστο κέρδος ανάδρασης φίλτρου Kalman (H=I):<br />
−1<br />
k 1 ( k 1| k) ⎡ ( k 1| k)<br />
⎤<br />
+ = + ⋅ + +<br />
⎢⎣ ⎥⎦<br />
K P P R<br />
(Π.1-5)<br />
(Π.1-4)<br />
Νέα ανανεωμένη εκτίμηση κατάστασης και νέα μήτρα διακύμανσης<br />
xˆ( k+ 1) = xˆ( k+ 1| k) + K z −xˆ(<br />
k+ 1| k)<br />
και P( k+ 1) = ⎡I−K ⎤<br />
1 P(<br />
k+ 1| k)<br />
⎛ ⎞<br />
k+<br />
1⎜<br />
k 1<br />
⎟<br />
⎝ +<br />
⎠<br />
πρόβλεψη/εκτίμηση<br />
κατάστασης (a-priori)<br />
αβεβαιότητα<br />
πρόβλεψης<br />
Kalman (optimal)<br />
feedback ga<strong>in</strong><br />
⎢⎣ k+<br />
⎥⎦<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
2 2<br />
2 2<br />
σx + σwx<br />
y + wy<br />
xˆ = x+ ( z )<br />
2 2 2 x −x<br />
yˆ= y+ ( z )<br />
2 2 2 y −y<br />
σx + σw + σ x v<br />
σ x<br />
y + σw + σ y vy<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
(Π.1-6)<br />
Σύνθεση αισθητηρίων πληροφοριών<br />
– Παραδείγματα (συνέχεια) (2)<br />
Παράδειγμα 1 (συνέχεια)<br />
2 2<br />
Έστω, π.χ.: Cw = diag [ σw ( k), σ ( ) ]<br />
x w k y<br />
Έχουμε, εφαρμόζοντας το αναδρομικό φίλτρο Kalman:<br />
2 2 2 2<br />
Pk ( + 1| k) = Pk ( ) + Cw = diag [ ( σx( k) + σw ( k) ) , ( σ ( ) ( ) ) ]<br />
x y k + σw<br />
k y<br />
Βέλτιστο κέρδος ανάδρασης φίλτρου Kalman (H=I):<br />
[ ] -1<br />
Kk ( + 1) = Pk ( + 1| k) Pk ( + 1| k) + R =<br />
2 2<br />
⎡σx + σwx = ⎢<br />
⎣ 0<br />
2 2 2<br />
0 ⎤⎡σx + σw + σ x vx<br />
2 2 ⎥⎢<br />
σy + σw 0<br />
y⎦⎣ 0 ⎤<br />
2 2 2⎥<br />
σy + σw + σ y vy⎦<br />
2 2 2 2 2<br />
⎡( σx + σw ) ( σ )<br />
x x + σw + σ x vx<br />
= ⎢<br />
⎣ 0<br />
Νέα ανανεωμένη εκτίμηση κατάστασης<br />
0 ⎤<br />
2 2 2 2 2 ⎥<br />
( σy + σw ) ( σ )<br />
y y + σw + σ y vy<br />
⎦<br />
σ σ<br />
-1<br />
23<br />
24
Σύνθεση αισθητηρίων πληροφοριών<br />
– Παραδείγματα (συνέχεια) (3)<br />
Παράδειγμα 2–Επεκταμένο Φίλτρο Kalman (Extended KF)<br />
Έστω κινούμενο ρομπότ διαφορικής οδήγησης (differential drive)<br />
Το διάνυσμα κατάστασης του ρομπότ είναι: x(k) = [ x(k), y(k), θ(k) ] T<br />
Το διάνυσμα σημάτων ελέγχου είναι: u(k) = [ D(k), Δθ(k) ] T<br />
Το μη-γραμμικό μοντέλο του συστήματος στο χώρο κατάστασης:<br />
x( k+ 1) = Φ[<br />
x( k), u( k) ] + w( k)<br />
με Φ[ x u ]<br />
⎡x( k) + D( k)cos ( θ ( k)<br />
) ⎤<br />
⎢ ( θ ) ⎥<br />
⎢⎣ θ( k) +Δθ(<br />
k)<br />
⎥⎦<br />
( k), ( k) = y( k) + D( k)s<strong>in</strong> ( k)<br />
C w (k): μήτρα διακύμανσης (covariance matrix) της τυχαίας διαταραχής w(k)<br />
( k)( k)<br />
⎡ T ⎤<br />
w( k) E ⎢ ⎥<br />
⎢⎣ ⎥⎦<br />
⎡ 2 ⎤<br />
⎢σ x 0 0<br />
2 ⎥<br />
⎢ 0 σ y 0 ⎥<br />
⎢ 2⎥<br />
⎢ 0 0 σθ<br />
⎥<br />
⎣ ⎦<br />
C = w w = και E [ ] = 0<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
w<br />
k<br />
(Π.2-1)<br />
(Π.2-2)<br />
Σύνθεση αισθητηρίων πληροφοριών<br />
– Παραδείγματα (συνέχεια) (4)<br />
Παράδειγμα 2 (συνέχεια)<br />
Έστω τώρα ότι το κινούμενο ρομπότ διαθέτει αισθητήριο σύστημα που<br />
δίνει την απόσταση d του ρομπότ από κάποια συγκεκριμένη θέση<br />
αναφοράς (ορόσημο, l<strong>and</strong>mark): [xb , yb ] (π.χ. special signal-emitt<strong>in</strong>g beacon)<br />
Το μη-γραμμικό μοντέλο μετρήσεων για το σύστημα, είναι τώρα:<br />
k = h[ k ξ]<br />
+ v k<br />
[ x(<br />
), ] =<br />
2<br />
= ( ( ) − b) + ( ( ) − b)<br />
z( ) x( ), ( ) με<br />
2 2<br />
ξ ⎡ ⎤<br />
h k d x k x y k y<br />
⎣ ⎦<br />
και γνωστή μήτρα διακύμανσης C v (k)= C v για το θόρυβο v(k)<br />
(Π.2-3)<br />
25<br />
26
Σύνθεση αισθητηρίων πληροφοριών<br />
– Παραδείγματα (συνέχεια) (5)<br />
Παράδειγμα 2 (συνέχεια)<br />
( ˆ<br />
⎡xˆ( k) + D( k)cos θ ( k)<br />
) ⎤<br />
⎢yk ˆ( ) Dk ( )s<strong>in</strong> ( ˆ θ ( k)<br />
) ⎥<br />
⎢ ˆ<br />
⎣ θ( k) +Δθ(<br />
k)<br />
⎥⎦<br />
x ˆ( k+ 1| k)<br />
= +<br />
(Π.2-4)<br />
( ˆ θ )<br />
( ˆ θ )<br />
⎡ ⎤<br />
1 0 −Dk<br />
( )s<strong>in</strong> ( k)<br />
Ak =∇ Φ | = ⎢0 x= xˆ ( k)<br />
⎢0 1<br />
0<br />
Dk ( )cos<br />
1<br />
( k)<br />
⎥<br />
⎥<br />
(Π.2-5)<br />
⎣ ⎦<br />
T<br />
P( k+ 1| k) = A⋅ P( k) ⋅A<br />
+ C w(<br />
k)<br />
(Π.2-6)<br />
πρόβλεψη/εκτίμηση<br />
κατάστασης (a-priori)<br />
γραμμικοποίηση<br />
χώρου κατάστασης<br />
αβεβαιότητα<br />
πρόβλεψης<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Σύνθεση αισθητηρίων πληροφοριών<br />
– Παραδείγματα (συνέχεια) (6)<br />
Παράδειγμα 2 (συνέχεια)<br />
⎡2( xk ˆ( ) − xb)<br />
⎤<br />
k+ 1 =∇ h x= xˆ( k) = ⎢2( yk ˆ( ) − yb)<br />
⎥<br />
⎢ ⎥<br />
⎣ 0 ⎦<br />
H | (Π.2-7)<br />
Βέλτιστο κέρδος ανάδρασης φίλτρου Kalman:<br />
−1<br />
T ⎡ T ⎤<br />
k+ 1= ( k+ 1| k) ⋅ k+ 1⋅⎢ k+<br />
1 ( k+ 1| k)<br />
k 1 v ⎥<br />
⎣<br />
+ +<br />
⎦<br />
K P H H P H C (Π.2-8)<br />
T<br />
γραμμικοποίηση<br />
μοντέλου μέτρησης<br />
Νέα ανανεωμένη εκτίμηση κατάστασης και νέα μήτρα διακύμανσης<br />
xˆ( k+ 1) = xˆ(<br />
k+ 1| k) +K k r(<br />
k+<br />
1)<br />
και<br />
+ 1<br />
P( k+ 1) = I−K H P(<br />
k+ 1| k)<br />
⎡ ⎤<br />
⎢⎣ k+ 1 k+<br />
1⎥⎦<br />
⋅<br />
με r( k+ 1) = z −h(<br />
xˆ(<br />
k+ 1| k)<br />
)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Kalman (optimal)<br />
feedback ga<strong>in</strong><br />
⎛ ⎞<br />
⎜ k 1<br />
⎟<br />
⎝ +<br />
⎠<br />
(Π.2-10)<br />
(Π.2-9)<br />
27<br />
28
Σύνθεση αισθητηρίων πληροφοριών<br />
– Παραδείγματα (συνέχεια) (7)<br />
xˆ(<br />
k)<br />
xˆ(<br />
k+ 1| k)<br />
xˆ(<br />
k + 1)<br />
Αρχική Εκτίμηση Δράση / Κίνηση Μέτρηση<br />
Παράδειγμα 3: x( k+ 1) =Φ ((),()) x k u k + w()<br />
k z( k+ 1) = h((),()) x k u k + v()<br />
k<br />
⎡ ⎤<br />
⎢px⎥ ⎡ ⎤<br />
⎢ ⎥ ⎢D⎥ x=<br />
⎢py⎥ u=<br />
⎢ ⎥<br />
⎢ ⎥ ⎢δθ⎥ ⎢θ⎥ ⎣ ⎦<br />
⎣ ⎦<br />
⎡r⎤ (range)<br />
z=<br />
⎢ ⎥<br />
⎢ ⎥<br />
⎢b⎥ (bear<strong>in</strong>g)<br />
⎣ ⎦<br />
⎡p ( ) ( )cos ( ( ) )<br />
x k + D k θ k ⎤<br />
Φ( x( k), u(<br />
k)<br />
) = ⎢ p ( ) ( )s<strong>in</strong> ( ( ) )<br />
y k + D k θ k ⎥<br />
⎢⎣ θ( k) + δθ(<br />
k)<br />
⎥⎦<br />
2 2<br />
⎡ ( λx − px) + ( λy<br />
− py)<br />
⎤<br />
h(<br />
x( k), u(<br />
k)<br />
) = ⎢ λy<br />
− p ⎥<br />
⎛ y<br />
⎢<br />
⎞<br />
arc tan⎜<br />
⎟−θ⎥<br />
⎣ ⎝λx − px<br />
⎠ ⎦<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Σύνθεση αισθητηρίων πληροφοριών<br />
– Παραδείγματα (συνέχεια) (8)<br />
Παράδειγμα 3 (συνέχεια):<br />
Πρόβλεψη – Μοντέλο κίνησης<br />
xˆ(<br />
k+ 1| k)<br />
= +<br />
A =∇ Φ | =<br />
k<br />
x= xˆ ( k)<br />
( ˆ<br />
⎡pˆ x ( k) + D( k)cos θ ( k)<br />
) ⎤<br />
⎢pˆ ( ) ( )s<strong>in</strong> ( ˆ<br />
y k D k θ ( k)<br />
) ⎥<br />
⎢ ˆ<br />
⎣ θ( k) +Δθ(<br />
k)<br />
⎥⎦<br />
( ˆ θ )<br />
( ˆ θ )<br />
⎡1 0 −Dk<br />
( )s<strong>in</strong> ( k)<br />
⎤<br />
⎢0 1 Dk ( )cos ( k)<br />
⎥<br />
⎢0 0 1 ⎥<br />
⎣ ⎦<br />
P( k+ 1| k) = A ⋅ P( k) ⋅A<br />
+ C ( k)<br />
T<br />
k k w<br />
Μοντέλο μέτρησης<br />
H =∇ h | =<br />
k+<br />
1<br />
x= xˆ ( k)<br />
( pˆx −λx) ( pˆ<br />
y −λy)<br />
⎡ ⎤<br />
0<br />
⎢ r r ⎥<br />
= ⎢<br />
( y pˆ y) ( x pˆ<br />
⎥<br />
λ − λ − x<br />
⎢ )<br />
−1⎥<br />
2 2<br />
⎣ r r ⎦<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
k+<br />
1<br />
29<br />
( k+<br />
1 ( ) )<br />
xˆ( k+ 1) = xˆ( k+ 1| k) + K z −h<br />
xˆ(<br />
k+ 1| k)<br />
P( k+ 1) = I−K H P(<br />
k+ 1| k)<br />
⎡ ⎤<br />
⎢⎣ k+ 1 k+<br />
1⎥⎦<br />
⋅<br />
T T −1<br />
k+ 1= ( k+ 1| k) ⋅ k+ 1⋅⎡ k+<br />
1 ( k+ 1| k)<br />
⎤<br />
⎢ k+ 1+<br />
v<br />
⎣ ⎥⎦<br />
K P H H P H C<br />
d<br />
dx<br />
2<br />
( atan x) = 1 ( 1+<br />
x )<br />
30
Σύνθεση αισθητηρίων πληροφοριών<br />
– Χαρτογράφηση χώρου<br />
Τροχιά ρομπότ<br />
<strong>Sensor</strong> map<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Σύνθεση αισθητηρίων πληροφοριών<br />
– Αυτοεντοπισμός Θέσης (1)<br />
Open loop – no odometry<br />
Τροχιά ρομπότ<br />
Εκτίμηση θέσης ρομπότ<br />
With odometry –<br />
Robot k<strong>in</strong>ematic uncerta<strong>in</strong>ties<br />
ρομπότ<br />
Εκτίμηση θέσης ρομπότ<br />
With odometry –<br />
Precise robot k<strong>in</strong>ematics<br />
(stochastic errors)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
31<br />
32
Σύνθεση αισθητηρίων πληροφοριών<br />
– Αυτοεντοπισμός Θέσης (2)<br />
Εκτίμηση θέσης ρομπότ<br />
Τρέχουσα θέση ρομπότ<br />
οδομετρία<br />
: Πραγματική τροχιά ρομπότ<br />
ο : Εκτίμηση θέσης ρομπότ με χρήση οδομετρίας (odometry read<strong>in</strong>gs)<br />
+ : Βελτιωμένη εκτίμηση θέσης ρομπότ (IR read<strong>in</strong>gs – “geometric l<strong>and</strong>marks”)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
βελτιωμένη<br />
εκτίμηση θέσης<br />
Particle Filters – Sequential Monte Carlo<br />
Οι μέθοδοι Monte Carlo περιγράφουν, γενικά, κατανομές πιθανότητας ως σύνολα<br />
«σταθμισμένων δειγμάτων» (weighted samples) στο χώρο κατάστασης.<br />
Μελετώντας τα στατιστικά χαρακτηριστικά των δειγμάτων, καθώς εξελίσσονται<br />
μέσω της δυναμικής του συστήματος και της Bayesian λογικής, μπορεί να<br />
εκτιμηθεί, μέσω προσομοίωσης, η κατάσταση ενός στοχαστικού συστήματος.<br />
Particle Filters («φίλτρα σωματίων»): sequential Markov Cha<strong>in</strong> Monte Carlo<br />
(MCMC) μέθοδοι, βάσει importance sampl<strong>in</strong>g («δειγματοληψία σημαντικότητας»)<br />
Πρόβλημα: Η εκτίμηση της «εκ των υστέρων» (posterior) κατανομής πιθανότητας<br />
k k<br />
P( xk| Z , U , x0)<br />
η οποία προσεγγίζεται μέσω της κατανομής ενός συνόλου δειγμάτων {xi ,wi (i=1,…,N)<br />
(w<br />
}<br />
i : βάρη δειγμάτων)<br />
N<br />
i i<br />
( ) ≈∑( − )<br />
i P x wδx x (όπου = 1 )<br />
i=<br />
1<br />
∑ i w<br />
33<br />
34
Particle Filters - Εισαγωγή<br />
Έστω:<br />
xk<br />
: διάνυσμα κατάστασης προς εκτίμηση τη χρονική στιγμή k<br />
uk<br />
: διάνυσμα σημάτων ελέγχου, εφαρμοζόμενο στο χρονικό διάστημα [k–1, k],<br />
οδηγώντας την κατάσταση από το xk-1 στο xk .<br />
zk<br />
: διάνυσμα μετρήσεων (παρατήρησης) που λαμβάνεται τη χρονική στιγμή k<br />
k k−1<br />
Το ιστορικό των διανυσμάτων κατάστασης: X = { x0, x1, ,<br />
xk} = { X , xk}<br />
k k−1<br />
Το ιστορικό των διανυσμάτων ελέγχου: U = { u1, u2, ,<br />
uk} = { U , uk}<br />
k k−1<br />
Το ιστορικό των διανυσμάτων παρατήρησης: Z = z, z , ,<br />
z = Z , z<br />
{ 1 2 k} { k}<br />
• Μοντέλο Παρατήρησης (μέτρησης) – Ανανέωση Εκτίμησης (Bayes’ rule)<br />
k−1k k k P( zk | xk) P(<br />
xk | Z , U , x0)<br />
P(<br />
xk| Z , U , x0)<br />
=<br />
k−1k P z | Z , U<br />
( k )<br />
• Μοντέλο Πρόβλεψης – Μετάβασης Κατάστασης (Markov assumption)<br />
k−1 k<br />
P x | Z , U , x = P x | x , u × P x<br />
k−1 k−1<br />
| Z , U , x dx<br />
( ) ∫ ( ) ( )<br />
k 0 k k−1 k k−1 0 k−1<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Δειγματοληψία – Importance Sampl<strong>in</strong>g<br />
Περιγραφή κατανομής πιθανότητας μέσω σταθμισμένων δειγμάτων:<br />
N<br />
i i<br />
( ) ≈∑( − )<br />
i P x wδx x (όπου = 1 )<br />
i=<br />
1<br />
∑ i w<br />
Επιλογή βαρών (weights), ώστε να προκύψει «πιστή» αναπαράσταση της<br />
εκτιμούμενης κατανομής πιθανότητας P(x):<br />
Importance Density («πιθανότητα σημαντικότητας») q(x)<br />
Δειγματοληψία της q(x), και στάθμιση των δειγμάτων ως:<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
i<br />
( )<br />
i<br />
( x )<br />
i P<br />
∝<br />
q<br />
x<br />
w<br />
(α) Εαν q(x) ομοιόμορφη κατανομή πυκνότητας πιθανότητας σε όλο το χώρο<br />
i i<br />
κατάστασης, τότε: w ∝ P x<br />
(regular grid model)<br />
( )<br />
(β) Εαν q(x)=P(x), τότε w i (x)=(1/N) (particle distribution, with equal weights)<br />
35<br />
36
Δειγματοληψία Κατανομών (1)<br />
Προσέγγιση συναρτήσεων πυκνότητας πιθανότητας μέσω<br />
συνόλου δειγμάτων (approximat<strong>in</strong>g particle sets)<br />
Όσο μεγαλύτερος αριθμός δειγμάτων σε ένα διάστημα, τόσο μεγαλύτερη πιθανότητα<br />
Πώς μπορεί να γίνει η εξαγωγή δειγμάτων από μια συνάρτηση πιθανότητας;<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Δειγματοληψία Κατανομών (2)<br />
(α) Δειγματοληψία μέσω «Rejection Sampl<strong>in</strong>g»<br />
Έστω ότι f(x) c keep the sample<br />
otherwise reject the sample<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
37<br />
38
Δειγματοληψία Κατανομών (3)<br />
(β) Δειγματοληψία μέσω «Importance Sampl<strong>in</strong>g»<br />
Χρήση διαφορετικής κατανομής q για την εξαγωγή δειγμάτων<br />
από την f<br />
Εισάγοντας ένα βάρος «σημαντικότητας» μπορούμε να<br />
σταθμίσουμε τα δείγματα, ισοσταθμίζοντας τις «διαφορές<br />
μεταξύ των q και f»<br />
w = f / q<br />
Η f είναι η συνάρτηση «στόχος»<br />
Η q καλείται συνάρτηση<br />
«σημαντικότητας»<br />
(importance or proposal)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Particle Filters – Εισαγωγή (1)<br />
Στατιστική μέθοδος που βασίζεται στον κανόνα του Bayes και έχει χρησιμοποιηθεί<br />
σε πολλά συστήματα παρακολούθησης (track<strong>in</strong>g) αντικειμένων.<br />
Η βασική ιδέα της μεθόδου είναι η χρήση δειγμάτων (particles) για την<br />
αναπαράσταση του μοντέλου του συστήματος (αντί Gaussian κατανομών ή<br />
οποιουδήποτε άλλου μοντέλου) και η διάδοση μόνο των επικρατέστερων δειγμάτων.<br />
(“Survival of the fittest”)<br />
Βασικά Βήματα Αλγορίθμων που χρησιμοποιούν particle filter<strong>in</strong>g:<br />
• Τοποθέτηση Ν δειγμάτων (particles) στο χώρο κατάστασης του συστήματος<br />
• Ανάθεση βαρών (wi ) στα δείγματα με βάση τις παρατηρήσεις (μετρήσεις) που είναι<br />
διαθέσιμες για το σύστημα<br />
• Επαναδειγματοληψία (resampl<strong>in</strong>g): δίνεται περισσότερη βαρύτητα στα δείγματα που<br />
έχουν μεγαλύτερο βάρος και "ακυρώνονται" τα δείγματα με μικρά βάρη<br />
• Εξέλιξη δειγμάτων (με βάση το μοντέλο μετάβασης κατάστασης του συστήματος)<br />
• Επανάληψη των παραπάνω από το δεύτερο βήμα.<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
39<br />
40
Particle Filters – Εισαγωγή (2)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Particle Filters (1) – Βασικές Σχέσεις<br />
Αρχική Κατάσταση: η προγενέστερη εκ των υστέρων (posterior) κατανομή<br />
{δείγματα, βάρη}<br />
N<br />
P δ<br />
{ } 1<br />
i i Nk<br />
−<br />
x , w<br />
k−1 k-1| k− 1 i=<br />
1<br />
i i i<br />
( x ) = ( x | x 1)<br />
q P −<br />
k k k k<br />
k−1<br />
k−1i i<br />
( xk−1| Z ) = ∑wk-1<br />
( xk−1−xk−1) Δειγματοληψία – Importance Sampl<strong>in</strong>g: Μοντέλο μετάβασης κατάστασης<br />
Πρόβλεψη:<br />
Nk<br />
i=<br />
1<br />
k−1i i<br />
( xk | Z ) = ∑wk-1<br />
( xk −xk)<br />
P δ<br />
Nk<br />
i=<br />
1<br />
k i i<br />
( xk | Z ) = ∑wk<br />
( xk − xk)<br />
P δ<br />
Νέα Δείγματα i<br />
k<br />
Ανανέωση Βαρών – Μοντέλο Παρατήρησης<br />
Βελτιωμένη<br />
Εκτίμηση:<br />
i=<br />
1<br />
(updated posterior)<br />
i<br />
x xk−1<br />
i i<br />
από τα με wk = wk−1<br />
όπου<br />
(importance sampl<strong>in</strong>g based<br />
on the transition prior)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
w<br />
πιθανοφάνεια<br />
μέτρησης<br />
( | = )<br />
P(<br />
| = )<br />
w P z x x<br />
i i<br />
i k-1 k = Nk<br />
j<br />
∑wk-1<br />
j=<br />
1<br />
k<br />
zk k<br />
xk k<br />
j<br />
xk<br />
41<br />
42
Particle Filters (2) - Υλοποίηση<br />
• Μετάβαση Κατάστασης:<br />
{ } 1<br />
i i Nk<br />
−<br />
x , w<br />
k−1 k-1| k− 1 i=<br />
1<br />
( −1, −1,<br />
)<br />
i i i<br />
k = k k k<br />
x f x n<br />
Draw N k samples from P(n k-1 )<br />
• Ανανέωση Παρατήρησης: zk = h( xk, vk,<br />
k)<br />
( v k: noise sequence with known P(v k) )<br />
i i<br />
{ x , w }<br />
Nk<br />
k kk | − 1 i=<br />
1<br />
( n k: noise sequence with known P(n k) )<br />
i i<br />
{ x , w }<br />
k kk | − 1 i=<br />
1<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
⇒<br />
Nk<br />
με w = w<br />
i i<br />
k k−1<br />
Υπολογισμός «πιθανοφάνειας»<br />
(likelihoood) μέτρησης για κάθε δείγμα:<br />
i i<br />
Λ x = P z | x = x<br />
( k) ( k k k)<br />
i i<br />
{ x , w }<br />
( ) P(<br />
)<br />
i i i i i<br />
kk | ∝ kk | −1 Λ k = kk | −1<br />
k | k<br />
w w x w z x<br />
• Επαναδειγματοληψία (resampl<strong>in</strong>g):<br />
Nk<br />
k kk | i= 1<br />
Για την αποφυγή προβλημάτων «εκφυλισμού» των δειγμάτων (δηλαδή καταστάσεων όπου όλα τα βάρη<br />
πλην ενός τείνουν στο μηδέν) επιχειρείται «επαναδειγματοληψία» των δειγμάτων σε τακτά διαστήματα<br />
ώστε τα δείγματα να παραμένουν σχετικώς ισοσταθμισμένα<br />
Particle Filters (3) - Resampl<strong>in</strong>g<br />
Sequential Importance Resampl<strong>in</strong>g (Σειριακή Επαναδειγματοληψία σημαντικότητας)<br />
• Υπολογισμός κανονικοποιημένων βαρών (normalized importance weights):<br />
i i<br />
i wk−1P( zk | xk)<br />
wk<br />
= N<br />
i i<br />
w P z | x<br />
∑<br />
i=<br />
1<br />
( ) 2<br />
• Υπολογισμός ενεργού αριθμού δειγμάτων (effective number of particles):<br />
N eff =<br />
1<br />
i<br />
∑ wk<br />
(«εξασθένησης» δειγμάτων)<br />
(αποφυγή sample impoverishment)<br />
i<br />
( )<br />
k−1k k<br />
• Έλεγχος επαναδειγματοληψίας με βάση τον ενεργό αριθμό δειγμάτων:<br />
Εαν N eff
Εφαρμογή Particle Filter<strong>in</strong>g (1-1)<br />
1. Οπτική Παρακολούθηση Χειρονομιών (visual h<strong>and</strong> gesture track<strong>in</strong>g)<br />
Πιθανότητα χρώματος<br />
( ( , ) ( , ) )<br />
w = λ ⋅ p x y + λ ⋅diff x y ⋅w−<br />
i i<br />
k 1 i i 2 i i k 1<br />
Πιθανότητα κίνησης<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Εφαρμογή Particle Filter<strong>in</strong>g (1-2)<br />
1. Οπτική Παρακολούθηση Χειρονομιών (συνέχεια)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
45<br />
46
Εφαρμογή Particle Filter<strong>in</strong>g (2-1)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (localisation)<br />
Κάθε δείγμα (particle) αντιστοιχεί σε μια δυνατή κατάσταση<br />
(θέση ή διάταξη) του ρομπότ στο χώρο<br />
Η εξέλιξη των δειγμάτων γίνεται με βάση την πιθανότητα<br />
(σφάλματα) που εισάγει το μοντέλο κίνησης (importance or<br />
proposal distribution prediction step)<br />
To μοντέλο παρατήρησης (μετρήσεων) χρησιμοποιείται για τον<br />
υπολογισμό νέων βαρών για τη στάθμιση των δειγμάτων και την<br />
επαναδειγματοληψία (correction step)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Εφαρμογή Particle Filter<strong>in</strong>g (2-2)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (συνέχεια)<br />
Μοντέλο Κίνησης<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
47<br />
48
Εφαρμογή Particle Filter<strong>in</strong>g (2-3)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (συνέχεια)<br />
Μοντέλο Παρατήρησης (active rang<strong>in</strong>g sensors)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Εφαρμογή Particle Filter<strong>in</strong>g (2-4)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ με sonars<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
49<br />
50
Εφαρμογή Particle Filter<strong>in</strong>g (2-5)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ με sonars<br />
Αρχική Κατανομή<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Εφαρμογή Particle Filter<strong>in</strong>g (2-6)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ με sonars<br />
Κατανομή μετά την ενσωμάτωση 10 scans<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
51<br />
52
Εφαρμογή Particle Filter<strong>in</strong>g (2-7)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ με sonars<br />
Κατανομή μετά την ενσωμάτωση 65 scans<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Εφαρμογή Particle Filter<strong>in</strong>g (2-8)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ με sonars<br />
Εκτιμούμενη Διαδρομή του ρομπότ<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
53<br />
54
Εφαρμογή Particle Filter<strong>in</strong>g (2-9)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (συνέχεια)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Εφαρμογή Particle Filter<strong>in</strong>g (2-10)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (συνέχεια)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
55<br />
56
Εφαρμογή Particle Filter<strong>in</strong>g (2-11)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (συνέχεια)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Εφαρμογή Particle Filter<strong>in</strong>g (2-12)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (συνέχεια)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
57<br />
58
Εφαρμογή Particle Filter<strong>in</strong>g (2-13)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (συνέχεια)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Εφαρμογή Particle Filter<strong>in</strong>g (2-14)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (συνέχεια)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
59<br />
60
Εφαρμογή Particle Filter<strong>in</strong>g (2-15)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (συνέχεια)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Εφαρμογή Particle Filter<strong>in</strong>g (2-16)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (συνέχεια)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
61<br />
62
Εφαρμογή Particle Filter<strong>in</strong>g (2-17)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (συνέχεια)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Εφαρμογή Particle Filter<strong>in</strong>g (2-18)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (συνέχεια)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
63<br />
64
Εφαρμογή Particle Filter<strong>in</strong>g (2-19)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (συνέχεια)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Εφαρμογή Particle Filter<strong>in</strong>g (2-20)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (συνέχεια)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
65<br />
66
Εφαρμογή Particle Filter<strong>in</strong>g (2-21)<br />
2. Αυτοεντοπισμός Θέσης Κινούμενου Ρομπότ (συνέχεια)<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
Βιβλιογραφία<br />
• A. Gelb (editor), Applied Optimal Estimation, The MIT Press, 1986.<br />
• D. Bertsekas, Dynamic Programm<strong>in</strong>g <strong>and</strong> Control, Athena Scientific:<br />
Mass., USA, 1995.<br />
• F. Lewis, Optimal Estimation, John Wiley, 1986.<br />
• B. Anderson, J. Moore, Optimal Filter<strong>in</strong>g, Prentice Hall, 1979.<br />
• S. Thrun, W. Burgard <strong>and</strong> D. Fox, Probabilistic Robotics, MIT Press, 2007.<br />
• G. Dudek, M. Jenk<strong>in</strong>, Computational Pr<strong>in</strong>ciples of Mobile Robotics,<br />
Cambridge University Press, 2000.<br />
• R. Siegwart, I. R. Nourbakhsh, Introduction to Autonomous Mobile Robots,<br />
The MIT Press, Cambridge, MA, 2004<br />
• Michael Montemerlo, Sebastian Thrun, FastSLAM – A Scalable Method for<br />
the Simultaneous Localization <strong>and</strong> Mapp<strong>in</strong>g Problem <strong>in</strong> Robotics, Spr<strong>in</strong>ger<br />
Tracts <strong>in</strong> Advanced Robotics, 2007.<br />
• Siciliano, Bruno; Khatib, Oussama (Eds.), Spr<strong>in</strong>ger H<strong>and</strong>book of Robotics,<br />
Part C: Sens<strong>in</strong>g <strong>and</strong> Perception, Spr<strong>in</strong>ger 2008.<br />
Εθνικό Μετσόβιο Πολυτεχνείο, Σχολή ΗΜ&ΜΥ. Μάθημα: Ρομποτική ΙΙ (Κ. Τζαφέστας)<br />
67<br />
68