

Esempio demo di Eplan P8 - Rycad.it
Esempio demo di Eplan P8 - Rycad.it
Esempio demo di Eplan P8 - Rycad.it

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
0 1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
7<br />
8 9<br />
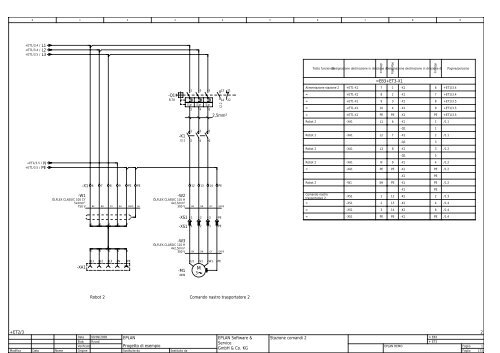
+ET1/3.4 / L1<br />
+ET1/3.4 / L2<br />
+ET1/3.5 / L3<br />
Testo funzionale Designazione destinazione in <strong>di</strong>rezione <strong>di</strong> Designazione destinazione in <strong>di</strong>rezione <strong>di</strong><br />
Attacco<br />
Morsetto<br />
Attacco<br />
Pagine/percorso<br />
=EB3+ET3-X1<br />
-Q1<br />
8,7A<br />
1 3 5 13<br />
14<br />
21<br />
22<br />
I> I> I><br />
2 4 6<br />
/2.2<br />
2,5mm²<br />
Alimentazione stazione 2 +ET1-X1<br />
7 1 -X1<br />
= +ET1-X1<br />
8 2 -X1<br />
= +ET1-X1<br />
9 3 -X1<br />
= +ET1-X1<br />
10 4 -X1<br />
= +ET1-X1<br />
PE PE -X1<br />
6<br />
7<br />
8<br />
9<br />
PE<br />
+ET1/3.4<br />
+ET1/3.4<br />
+ET1/3.5<br />
+ET1/3.5<br />
+ET1/3.5<br />
Robot 2 -XA1<br />
L1 6 -X1<br />
1<br />
/1.1<br />
-K1<br />
/3.1<br />
1<br />
2<br />
3<br />
4<br />
5<br />
6<br />
-Q1<br />
Robot 2 -XA1<br />
L2 7 -X1<br />
-Q1<br />
1<br />
2<br />
3<br />
/1.1<br />
Robot 2 -XA1<br />
L3 8 -X1<br />
3<br />
/1.2<br />
-Q1<br />
5<br />
+ET1/3.5 / N<br />
+ET1/3.5 / PE<br />
Robot 2 -XA1<br />
N 9 -X1<br />
= -XA1<br />
PE PE -X1<br />
4<br />
PE<br />
/1.2<br />
/1.2<br />
-X1<br />
PE<br />
-W1<br />
ÖLFLEX CLASSIC 100 CY<br />
5x4mm²<br />
750 V<br />
-X1 6 7 8 9 PE PE<br />
BK<br />
BN<br />
GY<br />
BU<br />
GNYE<br />
SH<br />
-W2<br />
ÖLFLEX CLASSIC 110 H<br />
4x2,5mm²<br />
300 V<br />
12<br />
BK<br />
13<br />
BN<br />
14<br />
GY<br />
PE<br />
GNYE<br />
Robot 2<br />
Comando nastro<br />
trasportatore 2<br />
-W1<br />
-XS1<br />
SH PE -X1<br />
-X1<br />
1 12 -K1<br />
= -XS1<br />
2 13 -K1<br />
= -XS1<br />
3 14 -K1<br />
PE<br />
PE<br />
2<br />
4<br />
6<br />
/1.2<br />
/1.3<br />
/1.4<br />
/1.4<br />
-XS1 1<br />
2<br />
3<br />
PE<br />
= -XS1<br />
PE PE -X1<br />
PE<br />
/1.4<br />
1 2 3 4 5<br />
-XS1 1<br />
2<br />
3<br />
PE<br />
1 2 3 4 5<br />
-W3<br />
ÖLFLEX CLASSIC 110 H<br />
4x2,5mm²<br />
300 V<br />
BK<br />
BN<br />
GY<br />
GNYE<br />
-XA1<br />
L1 L2 L3 N PE<br />
M<br />
-M1<br />
3<br />
4kW<br />
U1 V1 W1 PE<br />
Robot 2<br />
Comando nastro trasportatore 2<br />
+ET2/3<br />
Mo<strong>di</strong>fica<br />
Data<br />
Nome<br />
Data 09/09/2008 EPLAN<br />
EPLAN Software & Stazione coman<strong>di</strong> 2<br />
= EB3<br />
Elab. <strong>Rycad</strong> + ET3<br />
Service<br />
Verificato<br />
Progetto <strong>di</strong> esempio<br />
EPLAN DEMO<br />
GmbH & Co. KG<br />
Origine<br />
Sost<strong>it</strong>u<strong>it</strong>o da<br />
Sost<strong>it</strong>u<strong>it</strong>o da<br />
Foglio<br />
Foglio<br />
2<br />
1<br />
173