Uomini e robot - Apogeonline
Uomini e robot - Apogeonline
Uomini e robot - Apogeonline

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Uomini</strong> e <strong>robot</strong><br />
quilibrio, in assenza di questo si<br />
cade. Sappiamo che un sistema è<br />
stabile quando appoggia su tre<br />
“gambe” (non allineate). Una<br />
sedia a due gambe non funziona.<br />
Se però l’oggetto si deve muovere<br />
questo richiede che almeno<br />
una delle gambe si stacchi da<br />
terra e quindi per assicurare l’equilibrio<br />
occorre averne almeno<br />
altre 3. Un sistema a quattro<br />
zampe può quindi spostarsi<br />
restando sempre in equilibrio. La<br />
rapidità di movimento migliora<br />
però se il sistema passa attraverso<br />
fasi di equilibrio instabile,<br />
come succede nel movimento dei<br />
quadrupedi in cui vengono spostate allo stesso istante 2 zampe (lasciandone<br />
quindi solamente due a contatto con il terreno in una situazione di instabilità<br />
statica).<br />
Il mantenimento di una stabilita`<br />
dinamica nello spostamento<br />
rimane un forte elemento<br />
di complessità per i <strong>robot</strong>.<br />
Il movimento delle singole<br />
“gambe” così come quello di<br />
tutte le diverse parti che devono<br />
muoversi può essere effettuato<br />
tramite dei sistemi di leve<br />
e ingranaggi, meccanismi idraulici<br />
o altri ancora.<br />
La Festo AG, azienda specializzata<br />
nella realizzazione di<br />
<strong>robot</strong> per catene di montaggio<br />
per autovetture, PC e pasti preconfezionati,<br />
ha sviluppato<br />
TRON-X un <strong>robot</strong> “androide”,<br />
cioe` simile ad un uomo come<br />
aspetto esterno, i cui movimenti<br />
sono resi possibili da circa<br />
200 cilindretti pneumatici in<br />
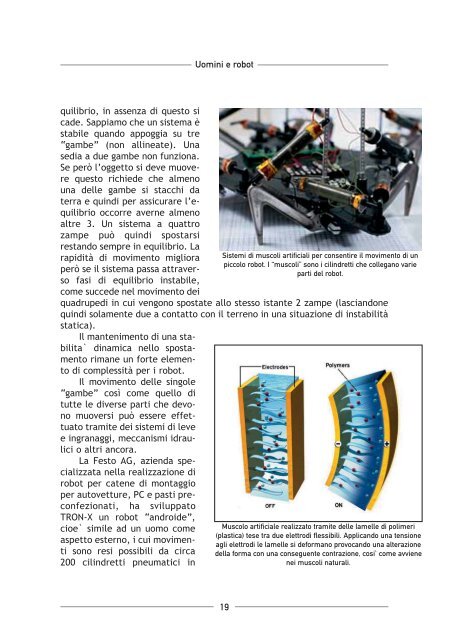
Sistemi di muscoli artificiali per consentire il movimento di un<br />
piccolo <strong>robot</strong>. I “muscoli” sono i cilindretti che collegano varie<br />
parti del <strong>robot</strong>.<br />
Muscolo artificiale realizzato tramite delle lamelle di polimeri<br />
(plastica) tese tra due elettrodi flessibili. Applicando una tensione<br />
agli elettrodi le lamelle si deformano provocando una alterazione<br />
della forma con una conseguente contrazione, cosi` come avviene<br />
nei muscoli naturali.<br />
19