Uomini e robot - Apogeonline
Uomini e robot - Apogeonline
Uomini e robot - Apogeonline

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Uomini</strong> e <strong>robot</strong><br />
Gli “swarm”<br />
Swarm è l’equivalente inglese di “sciame”. In<br />
uno swarm il comportamento osservato non è<br />
quello di un singolo componente dello sciame ma<br />
quello complessivo di tutti gli elementi. Diciamo<br />
che uno sciame di api va in una certa direzione se<br />
la maggioranza delle api vanno in quella direzione,<br />
non badiamo cioè a quello che una singola ape sta<br />
facendo.<br />
Uno swarm presuppone l’esistenza di componenti<br />
ragionevolmente piccoli, diciamo una<br />
dimensione di un insetto. Se gli elementi componenti<br />
sono sensibilmente più grandi l’attenzione si<br />
sposta sul singolo componente.<br />
Inoltre il singolo componente deve avere un<br />
comportamento che, per quanto sofisticato,<br />
risulta minimale rispetto al comportamento dello<br />
sciame.<br />
Ciascun micro-<strong>robot</strong> deve possedere una<br />
capacità di elaborazione propria ed un certo insieme<br />
di sensori che gli consentano di acquisire una consapevolezza dell’ambiente.<br />
Inoltre deve essere in grado di comunicare con altri <strong>robot</strong> che fanno<br />
parte dell’ambiente. Questo può avvenire in due modi, così come peraltro<br />
capita in natura. Il primo comporta una comunicazione tra i <strong>robot</strong> stessi e una<br />
negoziazione tra questi per arrivare a formulare un modello complessivo dell’ambiente<br />
attuale e a fronte dell’obiettivo dello sciame identificare una<br />
strategia di evoluzione del comportamento. Questo tipo di approccio ha una<br />
complessità non indifferente e richiede una capacità tecnologica ed elaborativi<br />
non indifferente con un conseguente consumo,<br />
relativamente, elevato di energia. In natura troviamo<br />
questo tipo di strategia solo in ambienti<br />
sociali evoluti, ad esempio tra i branchi di lupi (e<br />
tra gli umani).<br />
Il secondo approccio invece non prevede una<br />
comunicazione diretta tra i <strong>robot</strong> ma una mediata<br />
con l’ambiente. Un <strong>robot</strong> comportandosi in un<br />
certo modo cambia l’ambiente attorno e un <strong>robot</strong><br />
che stia in quell’ambiente reagisce variando il suo<br />
comportamento. Se esiste una coerenza tra queste<br />
reazioni al cambiamento, emerge un comportamento<br />
complessivo che sembra derivare da una<br />
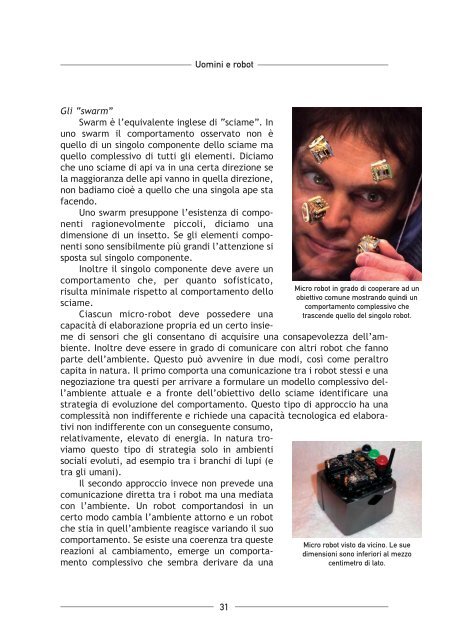
Micro <strong>robot</strong> in grado di cooperare ad un<br />
obiettivo comune mostrando quindi un<br />
comportamento complessivo che<br />
trascende quello del singolo <strong>robot</strong>.<br />
Micro <strong>robot</strong> visto da vicino. Le sue<br />
dimensioni sono inferiori al mezzo<br />
centimetro di lato.<br />
31