teoria tecnologie aerospaziali CS.pdf
teoria tecnologie aerospaziali CS.pdf
teoria tecnologie aerospaziali CS.pdf

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
1 RICHIAMI DI MECCANICA DEL CONTINUO<br />
1.1 Tensore degli sforzi<br />
Lo stato di tensione in corrispondenza di un punto appartenente ad un continuo è rappresentato, in<br />
base al teorema di Cauchy<br />
<br />
t [ T]<br />
nˆ<br />
(1.1.1),<br />
dal tensore doppio simmetrico<br />
x xy xz<br />
T (1.1.2)<br />
yx<br />
y<br />
yz<br />
zx<br />
zy<br />
z<br />
costituito dai seguenti sei componenti linearmente indipendenti:<br />
organizzabili in un vettore 6 x 1.<br />
x<br />
,<br />
y<br />
,<br />
z<br />
,<br />
xy,<br />
xz,<br />
yz<br />
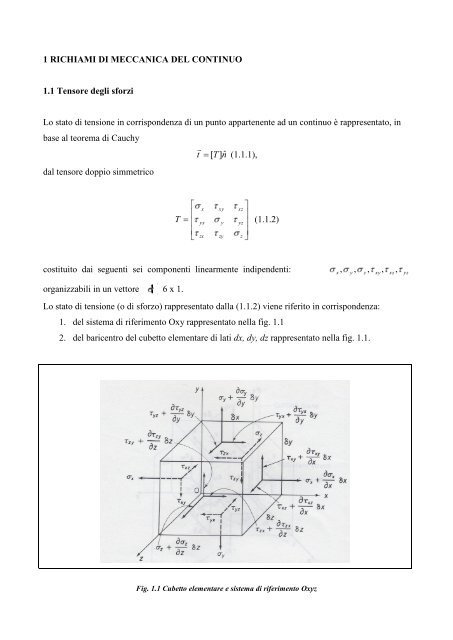
Lo stato di tensione (o di sforzo) rappresentato dalla (1.1.2) viene riferito in corrispondenza:<br />
1. del sistema di riferimento Oxy rappresentato nella fig. 1.1<br />
2. del baricentro del cubetto elementare di lati dx, dy, dz rappresentato nella fig. 1.1.<br />
Fig. 1.1 Cubetto elementare e sistema di riferimento Oxyz
Se si cambia sistema di riferimento, ovvero se lo si fa ruotare, le componenti di [T] si trasformano<br />
seguendo la legge di variazione di un tensore doppio, il quale permane sym.<br />
In particolare, nel caso di un materiale isotropo e omogeneo, è possibile individuare (risolvendo un<br />
problema agli autovalori/autovettori) delle giaciture privilegiate, rispetto alle quali le componenti di<br />
[T] sulle quali il vettore tensione (1.1) presenti solo delle componenti normali; le giaciture<br />
privilegiate vengono individuate da una terna di assi detti principali (rispetto ai quali, per l’appunto,<br />
, sono nulle). La (1.1.2), scritta rispetto alla terna principale, diventa:<br />
xy xz,<br />
yz<br />
1.<br />
0<br />
0<br />
I<br />
0<br />
0<br />
II<br />
0<br />
0<br />
III<br />
(1.3)<br />
Dove<br />
I II III<br />
.<br />
Infine, si ricorda che è possibile determinare<br />
x y<br />
,<br />
z<br />
,<br />
xy,<br />
xz,<br />
, (cioè tutte le componenti di [T]<br />
yz<br />
rispetto ad una terna di riferimento diversa da quella principale) una volta noti i valori degli sforzi<br />
principali.<br />
1.2 Tensore delle deformazioni<br />
Nella presente sezione ci si limita a considerare il solo campo di deformazione lineare.<br />
In analogia alla definizione del tensore degli sforzi, è possibile definirne uno doppio simmetrico<br />
delle deformazioni [ ].<br />
x xy xz<br />
[ ]<br />
(1.2.1)<br />
yx<br />
yy<br />
yz<br />
zx<br />
zy<br />
zz<br />
dove:
x<br />
y<br />
z<br />
xy<br />
xz<br />
yz<br />
u<br />
x<br />
v<br />
y<br />
w<br />
z<br />
u<br />
y<br />
u<br />
z<br />
v<br />
z<br />
v<br />
x<br />
w<br />
x<br />
w<br />
y<br />
sono i suoi costituenti linearmente indipendenti (u,v,w sono le componenti lungo gli assi x,y,z del<br />
vettore di spostamento u ) organizzabili in un vettore 6 x 1.<br />
Le componenti miste del tensore (1.2.1) possono essere espresse come “deformazioni angolari”<br />
mediante la seguente relazione:<br />
mn<br />
2<br />
mn<br />
(1.2.2)<br />
Tale modalità di scrittura viene adottata, per comodità, al momento della scrittura delle relazioni<br />
costitutive.<br />
Continuando nell’analogia col tensore degli sforzi, anche per quello delle deformazioni si dimostra<br />
che, nel caso di un materiale isotropo ed omogeneo, esistono tre assi (rappresentativi di tre<br />
giaciture) linearmente indipendenti (detti, ancora una volta, assi principali) rispetto ai quali le tre<br />
distorsioni<br />
, sono nulle. In definitiva, rispetto ad una terna principale di riferimento, il<br />
xy xz,<br />
yz<br />
tensore delle deformazioni (1.2.1) diventa:<br />
I<br />
0<br />
0<br />
0<br />
II<br />
0<br />
0<br />
0<br />
III<br />
(1.2.3)<br />
Infine, si ricorda che è possibile determinare<br />
x y<br />
,<br />
z<br />
,<br />
xy,<br />
xz,<br />
, (cioè tutte le componenti di [ ]<br />
yz<br />
rispetto ad una terna di riferimento diversa da quella principale) una volta noti i valori degli sforzi<br />
principali.
1.3 Legge di Hooke generalizzata<br />
La legge di Hooke generalizzata, ovvero l’espressione delle relazioni costitutive di un materiale in<br />
campo lineare, si scrive come:<br />
C (1.3.1)<br />
essendo<br />
[C] = matrice di elasticità (6 x 6)<br />
Sym.<br />
Nel caso di un materiale isotropo ed omogeneo, si ricorre, nell’ambito delle formulazioni e dei<br />
calcoli, a due parametri ingegneristici (ricavabili dalla classica prova di trazione) linearmente<br />
indipendenti:<br />
E = modulo di Young<br />
= coefficiente di Poisson<br />
Vi è infine il parametro G =<br />
E<br />
2(1<br />
)<br />
1<br />
; poiché 0 . 3 o 0.5, è possibile approssimare G E<br />
3<br />
.<br />
La 1.3.1 può essere invertita utilizzando la matrice di flessibilità [F] = [C] -1 :<br />
[F]<br />
(1.3.2)<br />
La (1.3.2), scritta rispetto ad una generica terna di assi, è la seguente:<br />
x<br />
y<br />
x<br />
1 . 0 0 0<br />
1<br />
.... . . . . . . . .... (1.3.3)<br />
E<br />
0 0 0 . 2(1 ) 0 0<br />
xz<br />
yz<br />
xy<br />
1<br />
. 0 0 0<br />
1 . 0 0 0<br />
0 0 0 . 0 2(1 ) 0<br />
0 0 0 . 0 0 2(1 )<br />
x<br />
y<br />
z<br />
xz<br />
yz<br />
xy
Dalla (1.3.3) si evince come non sia possibile determinare se si conoscono solo le ovvero<br />
determinare le conoscendo solo le .<br />
Nel caso di stato di sforzo uniassiale (ad esempio lungo l’asse x, y z<br />
0 ) , la (1.3.3)<br />
diventa:<br />
x<br />
1<br />
E<br />
x<br />
y<br />
E<br />
x<br />
(1.3.4)<br />
z<br />
E<br />
z<br />
Tenendo conto che ci si trova in corrispondenza di sforzi e deformazioni riferibili ad un asse<br />
principale, le (1.3.4) riscritte in termini di sforzo e deformazioni principali e sommate danno:<br />
I<br />
II<br />
III<br />
1<br />
2<br />
E<br />
I<br />
(1.3.5)<br />
Generalizzando la (1.3.5) al caso di uno stato di sollecitazione tri-assiale, è possibile riscrivere la<br />
legge di Hooke come segue:<br />
I<br />
II<br />
III<br />
1<br />
2<br />
E<br />
(<br />
I<br />
II<br />
III<br />
)<br />
(1.3.6)<br />
dividendo e moltiplicando per 3 il secondo membro della (1.3.6) si ha:<br />
m<br />
V<br />
(1.3.7)<br />
K<br />
dove:<br />
V<br />
I<br />
II<br />
III<br />
= VARIAZIONE UNITARIA DI VOLUME<br />
I II III<br />
m<br />
= TENSIONE MEDIA<br />
3<br />
E<br />
K = MODULO DI ELASTICITÀ CUBICA<br />
3(1 2 )
1.4 STATO DI TENSIONE PIANA<br />
Poiché numerosi componenti strutturali aeronautici vengono fabbricati utilizzando lamiere sottili, in<br />
prima approssimazione, è possibile trascurare gli sforzi attraverso lo spessore:<br />
z xz yz= 0 (1.4.1)<br />
In tal caso si sta rappresentando una condizione di sforzo piano per la quale le equazioni di<br />
continuità si riducono a:<br />
x<br />
y<br />
x<br />
y<br />
xy<br />
y<br />
yx<br />
x<br />
X<br />
Y<br />
0<br />
0<br />
(1.4.2)<br />
Essendo X e Y, rispettivamente, le componenti di una generica forza esterna F (detta condizione di<br />
carico) secondo gli assi x e y di un generico sistema di riferimento Oxyz.
1.5 SFORZI PRINCIPALI<br />
Come già accennato nel paragrafo 1.1, le componenti del tensore degli sforzi possono essere scritte<br />
facendo riferimento ad una terna di riferimento principale (e lo stesso vale per le equazioni (1.4.2));<br />
ciò è dovuto a molteplici necessità:<br />
Disporre di espressioni invarianti alle rotazioni del sistema di riferimento;<br />
Identificare le giaciture ove sia nullo il contributo delle tau;<br />
Evidenziare (ai fini della determinazione delle condizioni di criticità – snervamento, rottura,<br />
ecc. -) l’effettivo stato di sollecitazione locale, spesso non appieno comprensibile se si<br />
utilizza un sistema di riferimento diverso da quello principale (questo può essere il tipico<br />
problema di edilizia nel quale si intendono identificare le direzioni principali di sforzo al<br />
fine di determinare l’orientamento delle armature di rinforzo per il cemento).<br />
Vi sono principalmente due modi per giungere alla determinazione dei valori degli sforzi principali:<br />
o si risolve un problema agli autovalori/ autovettori, o si esegue il ragionamento riportato di<br />
seguito.<br />
Si consideri un corpo B (fig. 1.2) di spessore unitario (in sostanza si intende prendere in<br />
considerazione un elemento bi-dimensionale) e lo si sezioni con un piano p inclinato di un angolo<br />
(che può variare in modo continuo tra [0 e 2 ) rispetto alla verticale.<br />
I lati dx e dy dell’elemento sono “corti” in modo da ipotizzarvi una distribuzione uniforme degli<br />
sforzi.<br />
y<br />
y<br />
xy<br />
x<br />
A<br />
xy<br />
xy<br />
C<br />
B<br />
x<br />
xy<br />
y<br />
AB = 1<br />
AC = AB cos = cos<br />
A<br />
O<br />
x
BC = AB sin<br />
= AB sin<br />
x<br />
xy<br />
C<br />
B<br />
xy<br />
y<br />
Fig. 1.2<br />
L’equilibrio delle forze secondo le direzioni normale e parallela al piano inclinato è rappresentato<br />
da:<br />
AB<br />
AB<br />
x<br />
x<br />
cos AC<br />
sin AC<br />
y<br />
y<br />
sin<br />
cos<br />
CB<br />
CB<br />
yx<br />
yx<br />
cos CB<br />
sin<br />
CB<br />
xy<br />
xy<br />
sin<br />
cos<br />
AC<br />
AC<br />
0<br />
0<br />
da cui, sostituendo i valori di AB, AC e BC :<br />
x<br />
cos<br />
2<br />
y<br />
sin<br />
2<br />
2<br />
xy<br />
sin<br />
cos<br />
x<br />
sin<br />
cos<br />
y<br />
sin<br />
cos<br />
xy<br />
sin<br />
2<br />
xy<br />
cos<br />
2<br />
ovvero:<br />
1<br />
2<br />
x<br />
cos<br />
x<br />
2<br />
sin 2<br />
y<br />
1<br />
2<br />
sin<br />
y<br />
2<br />
sin 2<br />
xy<br />
sin 2<br />
xy<br />
(sin<br />
2<br />
cos<br />
2<br />
)<br />
da cui, in definitiva:
x<br />
cos<br />
2<br />
2<br />
x y<br />
sin 2<br />
y<br />
sin<br />
2<br />
xy<br />
cos2<br />
xy<br />
sin 2<br />
(1.5.1)<br />
Osservando attentamente la (1.5.1) si nota che:<br />
( )<br />
( )<br />
(1.5.2)<br />
ovvero che sia la sigma che la tau possono assumere diversi valori al variare dell’angolo alfa; i<br />
valori a cui si è interessati sono, per ragioni di sicurezza (e quindi ai fini della progettazione o della<br />
verifica di resistenza) quelli massimi.<br />
Questi ultimi possono essere ricercati tenendo conto delle (1.5.2), cioè derivando le espressioni<br />
degli sforzi normale e tangenziale rispetto all’angolo .<br />
d<br />
d<br />
0 2cos sin<br />
x<br />
2sin cos<br />
y<br />
2<br />
xy<br />
cos2<br />
0<br />
da cui<br />
sin 2<br />
x<br />
sin 2<br />
y<br />
2<br />
xy<br />
cos2<br />
0<br />
sin 2<br />
(<br />
x<br />
y<br />
)<br />
2<br />
xy<br />
cos2<br />
0<br />
indi<br />
2<br />
xy<br />
tg2 (1.5.3)<br />
x y<br />
La (1.5.3) presenta due soluzioni: una per e l’altra per : ciò significa che esistono due<br />
2<br />
piani mutuamente ortogonali sui quali lo sforzo normale una volta è massimo e l’altra minimo.<br />
Questi piani, inoltre (come si verificherà nel seguito) corrispondono a quelli dove è assente lo<br />
sforzo tangenziale: trattasi dei piani principali.<br />
Risolvendo la (1.5.3) per , rispetto al seno si ha:
sin 2<br />
cos2<br />
2<br />
x<br />
xy<br />
y<br />
A<br />
1<br />
sin 2<br />
sin<br />
A<br />
sin<br />
A<br />
(1<br />
sin<br />
sin 2<br />
2 2<br />
2<br />
2<br />
1<br />
2<br />
)<br />
2<br />
A<br />
A<br />
2<br />
sin 2<br />
(<br />
2<br />
x<br />
xy<br />
y<br />
)<br />
1<br />
(<br />
1<br />
x<br />
4<br />
2<br />
xy<br />
y<br />
)<br />
2<br />
sin 2<br />
(<br />
x<br />
2<br />
y<br />
xy<br />
)<br />
2<br />
4<br />
2<br />
xy<br />
(1.5.4)<br />
rispetto al coseno si ha:<br />
sin 2<br />
cos2<br />
2<br />
x<br />
xy<br />
y<br />
A<br />
1 cos<br />
cos2<br />
2<br />
A<br />
2<br />
1 cos 2<br />
2<br />
cos 2<br />
A<br />
2<br />
cos2<br />
1<br />
1<br />
A<br />
2<br />
cos2<br />
(<br />
x<br />
x<br />
y<br />
.<br />
)<br />
2<br />
y<br />
4<br />
2<br />
xy<br />
(1.5.5)<br />
Per<br />
sin 2<br />
cos2<br />
(<br />
(<br />
x<br />
x<br />
2 si ha: 2<br />
2<br />
x<br />
y<br />
xy<br />
y<br />
)<br />
)<br />
2<br />
2<br />
y<br />
4<br />
4<br />
2<br />
xy<br />
xy<br />
(1.5.6)
1 cos 2<br />
Sostituendo la (1.5.4) e la (1.5.5) nella prima delle (1.5.1) e ricordando che cos ,<br />
2<br />
1 cos 2<br />
sin , si ha:<br />
2<br />
x<br />
cos<br />
2<br />
y<br />
sin<br />
2<br />
2<br />
xy<br />
sin 2<br />
x<br />
1<br />
cos2<br />
2<br />
y<br />
1<br />
cos2<br />
2<br />
2<br />
xy<br />
sin 2<br />
I<br />
2<br />
x<br />
1<br />
(<br />
x<br />
x<br />
y<br />
)<br />
2<br />
y<br />
4<br />
2<br />
xy<br />
2<br />
y<br />
1<br />
(<br />
x<br />
x<br />
y<br />
)<br />
2<br />
y<br />
4<br />
2<br />
xy<br />
xy<br />
(<br />
x<br />
2<br />
y<br />
xy<br />
)<br />
2<br />
4<br />
2<br />
xy<br />
1<br />
2<br />
x y<br />
2 2<br />
I<br />
(<br />
x y<br />
) 4<br />
xy<br />
(1.5.7)<br />
2<br />
Analogamente, sostituendo le (1.5.6) nella prima delle (1.5.1) e ricordando che<br />
1 cos 2<br />
cos ,<br />
2<br />
sin<br />
1<br />
cos 2<br />
2<br />
, si ha:<br />
1<br />
2<br />
x y<br />
2 2<br />
II<br />
(<br />
x y<br />
) 4<br />
xy<br />
(1.5.8)<br />
2<br />
Poiché le radici quadrate che compaiono nella (1.5.7) e nella (1.5.8) devono essere quantità reali<br />
positive, si comprende come, in senso algebrico (cioè nel senso che, ad esempio, 3>-5)<br />
si definiscono pertanto:<br />
I II<br />
;<br />
I<br />
= massimo sforzo (principale) normale<br />
II<br />
= minimo sforzo (principale) normale
1.6 Massimo sforzo di taglio<br />
Ricordando che:<br />
dall’esamina delle (1.5.1) si nota:<br />
( )<br />
( )<br />
(1.5.2)<br />
ovvero che sia la sigma che la tau possono assumere diversi valori al variare dell’angolo<br />
alfa;<br />
i valori a cui si è interessati sono, per ragioni di sicurezza (e quindi ai fini della<br />
progettazione o della verifica di resistenza) quelli massimi;<br />
questi ultimi possono essere ricercati tenendo conto delle (1.5.2), cioè derivando le<br />
espressioni degli sforzi normale e tangenziale rispetto all’angolo ,<br />
di seguito si procede alla ricerca del massimo sforzo tangenziale derivando la tau di (1.5.1) rispetto<br />
ad alfa.<br />
d<br />
d<br />
(<br />
x y<br />
)2cos2<br />
0 2<br />
xy<br />
sin 2<br />
2<br />
0<br />
x<br />
tg2 (1.6.1)<br />
2<br />
xy<br />
y<br />
Procedendo in analogia a quanto fatto per le sigma principali, la (1.6.1) presenta le seguenti quattro<br />
espressioni soluzione:<br />
sin 2<br />
(<br />
x<br />
(<br />
x<br />
y<br />
)<br />
2<br />
y<br />
)<br />
4<br />
2<br />
xy<br />
sin 2(<br />
)<br />
2<br />
(<br />
x<br />
(<br />
x<br />
y<br />
)<br />
2<br />
y<br />
)<br />
4<br />
2<br />
xy<br />
(1.6.2)
cos2<br />
(<br />
x<br />
2<br />
y<br />
xy<br />
)<br />
2<br />
4<br />
2<br />
xy<br />
cos2(<br />
)<br />
2<br />
(<br />
x<br />
2<br />
y<br />
)<br />
xy<br />
2<br />
4<br />
2<br />
xy<br />
Sostituendo le (1.6.2)) nella seconda delle (1.5.1) si ha:<br />
2 2<br />
max, min<br />
(<br />
y<br />
) 4<br />
xy<br />
x<br />
(1.6.3)<br />
dove i valori massimo e minimo sono definiti in senso algebrico.<br />
Infine, tenendo conto delle (1.5.7) e (1.5.8), la (1.6.3) si riscrive come:<br />
max<br />
I<br />
2<br />
II<br />
(1.6.4)<br />
NOTE :<br />
1. le (1.6.3) e (1.6.4) forniscono il valore del massimo sforzo di taglio nel caso bidimensionale,<br />
mentre nel caso tri-dimensionale ciò non è sempre vero.<br />
2. Poiché la (1.6.4) è il reciproco negativo della (1.5.3), si deduce che gli angoli 2<br />
considerati nelle conseguenti espressioni (1.5.5)&(1.5.6) e (1.6.2) differiscono tra loro di<br />
90°, ovvero in alternativa, i piani di massimo sforzo di taglio sono inclinati di 45° rispetto a<br />
quelli principali.
1.7 Il cerchio di Mohr<br />
Tenendo conto di quanto determinato nei precedenti paragrafi, di seguito si mostra come sia<br />
possibile determinare e visualizzare graficamente lo stato di tensione in un punto appartenente ad un<br />
corpo deformabile.<br />
Sviluppando la prima delle (1.5.1) si ha:<br />
x<br />
1<br />
cos2<br />
2<br />
y<br />
1<br />
cos2<br />
2<br />
xy<br />
sin 2<br />
x<br />
2<br />
y<br />
1<br />
(<br />
2<br />
x<br />
y<br />
)cos2<br />
xy<br />
sin 2<br />
Quadrando la precedente espressione e sommandola alla seconda delle (1.5.1) si ha:<br />
1<br />
2<br />
2<br />
2<br />
2 1<br />
2<br />
x y<br />
(<br />
x y<br />
)<br />
xy<br />
(1.7.1)<br />
2<br />
La (1.7.1) rappresenta l’equazione di una circonferenza di raggio<br />
1<br />
2<br />
2 2<br />
R (<br />
x y<br />
) 4<br />
xy<br />
(1.7.2)<br />
Ed il cui centro giace nel punto di coordinate: ; 0<br />
2<br />
x<br />
y<br />
(1.7.3)
1.7.1 Costruzione del cerchio di Mohr nel caso bi-dimensionale<br />
Noti<br />
, , nel piano si tracciano i valori corrispondenti ai due piani coordinati<br />
x y<br />
,<br />
xy<br />
perpendicolari (ad esempio i piani XZ e YZ). A tali valori corrispondono due punti A e B che, per<br />
definizione, giacciono sulla circonferenza rappresentata dalla (1.7.1). Il suo centro C è il punto di<br />
intersezione tra l’asse delle ed il segmento AB.<br />
A<br />
y<br />
,<br />
B<br />
x<br />
,<br />
xy<br />
xy<br />
x<br />
C ; 0<br />
2<br />
y<br />
m ax<br />
A<br />
II<br />
C<br />
I<br />
B<br />
L’intersezione del cerchio con l’asse delle determina i valori di<br />
I<br />
e<br />
II<br />
. Un altro punto lo si<br />
ottiene tracciando una verticale V per B ed un’orizzontale O per A.<br />
Tracciato il cerchio, si ottengono anche i valori della m ax , a 45° (veri, rispetto ai 90° della<br />
costruzione grafica, così come tra<br />
I<br />
e<br />
II<br />
ci sono 90° effettivi, contro i 180° della<br />
rappresentazione grafica.<br />
E’ così possibile ottenere i valori di e per qualsiasi valore dell’angolo (si ottiene cioè un<br />
fascio di piani con retta di sostegno l’asse z).
z<br />
Piano yz<br />
Piano xz<br />
x<br />
Piano generico<br />
del fascio<br />
y<br />
NOTA<br />
Come convenzione dei segni, per il tracciamento del cerchio di Mohr, si consiglia di adottare quela<br />
riportata di seguito.<br />
+<br />
-<br />
+ -
1.7.2 Costruzione del cerchio di Mohr nel caso bi-dimensionale<br />
In questo caso si procede con la costruzione di due circoli distinti, secondo le modalità descritte,<br />
con piani perpendicolari (xz ed yz, poi yz e xy) ottenendo così i valori di<br />
La<br />
m axè pari a:<br />
, .<br />
I II<br />
,<br />
III<br />
max<br />
I<br />
2<br />
III<br />
m ax<br />
II<br />
III<br />
C 2<br />
I<br />
C 3<br />
C 1
1.7.3.1 Primo esempio bi-dimensionale<br />
E’ dato lo stato di sforzo piano illustrato nella figura seguente; questo si verifica in un punto critico<br />
di un componente di macchina realizzato in acciaio. Determinare gli sforzi principali, il massimo<br />
sforzo tangenziale e le direzioni principali.<br />
y<br />
40 MPa<br />
y<br />
xy<br />
25 MPa<br />
x<br />
80 MPa<br />
x<br />
Svolgimento<br />
Si è in corrispondenza di uno stato di tensione piana; le espressioni da utilizzare per ricavare gli<br />
sforzi principali sono le (1.5.7) e (1.5.8):<br />
2<br />
x y<br />
x y 2 80 40 80 40<br />
2<br />
I xy<br />
25 85MPa<br />
2 2<br />
2 2<br />
2<br />
2<br />
x y<br />
x y 2 80 40 80 40<br />
2<br />
II xy<br />
25 45<br />
2<br />
2<br />
2<br />
2<br />
2<br />
MPa<br />
La massima tensione tangenziale la si ottiene impiegando la (1.6.3) o la (1.6.4) ed è pari a 65MPa.<br />
Dalla (1.7.3), il centro C ha coordinate (20MPa, 0); dalla (1.7.2), il raggio del cerchio vale R =<br />
65MPa.
A , =(-40,25)<br />
y<br />
x<br />
xy<br />
B , = (80,-25)<br />
xy<br />
x<br />
C ; 0<br />
2<br />
y<br />
=(20,0)<br />
Nel presente problema, lo sforzo di taglio, per come riportato nel testo del problema è<br />
positivo<br />
m ax<br />
A<br />
II<br />
C<br />
I<br />
2<br />
B<br />
Per la determinazione delle direzioni principali, si fa riferimento alla (1.5.3) da cui si esplicita:<br />
2<br />
tg<br />
1<br />
2<br />
x<br />
xy<br />
y<br />
=22.61°<br />
Ne consegue che l’angolo di inclinazione (rispetto agli assi x, y) del riferimento di assi principali è<br />
11 .31 .
med<br />
20 MPa<br />
max<br />
65MPa<br />
med<br />
20 MPa<br />
max<br />
65MPa<br />
T<br />
min<br />
II<br />
45MPa<br />
max<br />
I<br />
45MPa<br />
xy<br />
25 MPa<br />
y<br />
40 MPa<br />
45°<br />
N<br />
y<br />
x<br />
80 MPa<br />
x<br />
N = Direzione principale<br />
T = direzione dove è massimo lo sforzo di taglio (cfr nota n°2 del paragrafo 1.6)<br />
L’angolo è positivo in senso antiorario rispetto al diametro AB del cerchio di Mohr: nel<br />
presente esempio, il diametro congiungente i punti A e B compie deve essere ruotato proprio in<br />
senso anti-orario per farlo coincidere con il diametro degli sforzi principali.
1.7.3.2 Secondo esempio bi-dimensionale<br />
E’ dato lo stato di sforzo piano illustrato nella figura seguente; questo si verifica in un punto critico<br />
di un componente di macchina realizzato in acciaio. Determinare gli sforzi principali, il massimo<br />
sforzo tangenziale e le direzioni principali.<br />
y<br />
60 MPa<br />
y<br />
xy<br />
48 MPa<br />
x<br />
100 MPa<br />
x<br />
Svolgimento<br />
Si è in corrispondenza di uno stato di tensione piana; le espressioni da utilizzare per ricavare gli<br />
sforzi principali sono le (1.5.7) e (1.5.8):<br />
2<br />
x y<br />
x y 2 100 60 100 60<br />
2<br />
I xy<br />
48 132MPa<br />
2 2<br />
2 2<br />
2<br />
2<br />
x y<br />
x y 2 100 60 100 60<br />
2<br />
II xy<br />
48 28<br />
2<br />
2<br />
2<br />
2<br />
2<br />
MPa<br />
La massima tensione tangenziale la si ottiene impiegando la (1.6.3) o la (1.6.4) ed è pari a 52MPa.<br />
Dalla (1.7.3), il centro C ha coordinate (80MPa, 0); dalla (1.7.2), il raggio del cerchio vale R =<br />
52MPa.
A , =(60,-48)<br />
y<br />
x<br />
xy<br />
B , = (100,-(-48))= (100,48)<br />
xy<br />
x<br />
C ; 0<br />
2<br />
y<br />
=(80,0)<br />
Nel presente problema, lo sforzo di taglio, per come riportato nel testo del problema è<br />
negativo<br />
m ax<br />
B<br />
2<br />
II<br />
C<br />
I<br />
A<br />
Per la determinazione delle direzioni principali, si fa riferimento alla (1.5.3) da cui si esplicita:<br />
2<br />
tg<br />
1<br />
2<br />
x<br />
xy<br />
y<br />
=67.4°<br />
Ne consegue che l’angolo di inclinazione (rispetto agli assi x, y) del riferimento di assi principali è<br />
33 .7 .
y<br />
60 MPa<br />
xy<br />
48 MPa<br />
y<br />
x<br />
100 MPa<br />
N<br />
x<br />
min<br />
II<br />
28MPa<br />
max<br />
I<br />
132MPa<br />
N = Direzione principale<br />
L’angolo è positivo in senso antiorario rispetto al diametro AB del cerchio di Mohr: nel<br />
presente esempio, il diametro congiungente i punti A e B compie deve essere ruotato in senso<br />
orario per farlo coincidere con il diametro degli sforzi principali.
1.8 Bibliografia<br />
Scienza delle costruzioni. Introduzione alla meccanica dei materiali F.P. Beer E.Russell<br />
Johnston jr. McGraw-Hill Libri Italia S.r.l.<br />
Meccanica delle strutture. Il comportamento dei mezzi continui Vol. 1 Leone Corradi<br />
Dell’Acqua McGraw-Hill Libri Italia S.r.l.<br />
Analysis of Aircraft Structures. An introduction Bruce K. Donaldson McGraw-Hill International<br />
Editions<br />
Aircraft Structures for engineering students T.H.G. Megson ARNOLD