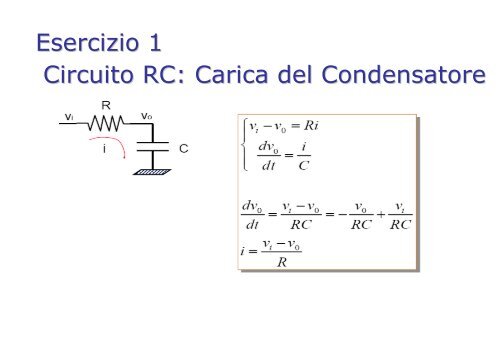
Circuito RC: Carica del Condensatore Esercizio 1
Circuito RC: Carica del Condensatore Esercizio 1
Circuito RC: Carica del Condensatore Esercizio 1

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Circuito</strong> <strong>RC</strong>:FUNZIONE DI TRASFERIMENTOMediante Trasformazione di Laplace <strong>del</strong>l’equazione equazione <strong>del</strong> primo ordine si ottiene:x&( t)=[ sXa⋅( s)−X ( s)⋅(s−x(t)+ b⋅u(t)x(0)]=a)=Equazione INGRESSO-USCITA:a⋅X ( s)+ b⋅U( s)x(0)+ b⋅U( s)1 bX ( s)= x(0)+ U ( s)( s−a)( s−a)FUNZIONE DI TRASFERIMENTO:bX ( s)= U ( s)( s−a)
Ipotesi di simulazione:<strong>Circuito</strong> <strong>RC</strong>:SCHEMA DI SIMULAZIONESchema di simulazione:1a=−=−2<strong>RC</strong>1b== 2<strong>RC</strong>x(0)= 0, x(0)= x0uu12( t)( t)k= ⋅δ−1( t),= k⋅sin(t)
<strong>Esercizio</strong> 2<strong>Circuito</strong> RLC serie:OSCILLATORE ELETTRICOVInputd 1( t)= R * i(t)+ L*i(t)+ ∫ i(τ ) dτ+ Vdt C2d R d 1i(t)+ * i(t)+ * i(t)= 02dt L dt L*CSistema equivalente <strong>del</strong> II° ORDINE:x(t)= i(t)&& x(t)+RLx&( t)+1LC⋅ x(t)= 0t0C(0)
<strong>Circuito</strong> RLC serie:Mediante Trasformazione di Laplace si ottiene:Nel dominio di Laplace tutti i componenti passivi sono mo<strong>del</strong>lati come impedenze,in particolare:Induttore => impedenza equivalente sL,Capacità => impedenza equivalente 1/sCResistenza => costante R
<strong>Circuito</strong> RLC serie:FUNZIONE DI TRASFERIMENTOLa tensione di uscita equivale alla c.d.t. ai capi <strong>del</strong> condensatore,ore,Che corrisponde alla tensione ai capi di un partitore di tensione e per cui :VVCC( s)( s)==1sC ⋅VIN( s)1R+sL+sC1⋅V( s)2 INLC⋅s + <strong>RC</strong> * s+1FUNZIONE DI TRASFERIMENTO:P(s)=LC * s21=+ <strong>RC</strong> * s+12sω2n1s+ 2* ζ *ωn+ 1⎧⎪ωn=⎨⎪ Rζ =⎪⎩21LCCL
<strong>Circuito</strong> RLC serie:SCHEMA DI SIMULAZIONEIpotesi di simulazione:R=10, 20,L=10 mHC=100 µ F50,16,0.1ΩVVIN1IN 2( t)= 5V( t)= 1VDCACSchema di simulazione:
<strong>Esercizio</strong> 3Pendolo Semplice:Mo<strong>del</strong>lo non lineare:I q&&+MgLsen( q(t)) = Lu(t)Linearizzazione intorno a q(t) (per piccole variazioni di q(t)):2MLEquazione INGRESSO-USCITA:q&&q&&+MgL q(t) = Lu(t)g 1= - q(t) + u(t)L MLFUNZIONE DI TRASFERIMENTO:y(s) =12M L s + M gu (s)
Pendolo Semplice:Variabili di stato:SPAZIO DI STATOx(t)x&x&== [xEquazione dinamica in spazio di stato:x1 2= -2 1&TT1x2]= [q q]g 1x + u(t)L MLEquazioni di stato in forma matriciale:⎡ x&⎢⎣x&y12=⎤⎥⎦⎡ 0= ⎢⎣−g / Lx⎢⎣x⎡ 1⎤[ 1 0] ⋅ ⎥ ⎦21⎤⎡⎥ ⋅ x0⎢⎦ ⎣x12⎤⎥⎦+⎡⎢⎣1/0 ⎤⎥ ⋅ uML⎦⎡x⎢⎣x12==q(t)⎤q&( t)⎥⎦⎧⎨⎩x&y==A⋅C⋅xx++B⋅uD⋅u
Pendolo Semplice ideale:SIMULAZIONE EVOLUZIONE LIBERAIpotesi di simulazione:Schema di simulazione:Mq&00= 1kgL=1mq( t)( t)== π rad / s0rad/sTempo di simulazione:210secu( t)=0
Pendolo Semplice con attrito:SIMULAZIONE EVOLUZIONE LIBERAEquazione <strong>del</strong> mo<strong>del</strong>lo con attrito:Nuova matrice dinamica:Ipotesi di simulazione:κ g 1J &&( t) = J &( t) - J ( t) + u( t)2Μ× L L M×L⎡ 0A=⎢−g⎢⎣L= 1kgL=1m( t)Schema di simulazione: analogo al pendolo idealeMqq&00( t)== π rad / s01kM×Lrad/sTempo di simulazione:22⎤⎥⎥⎦10seck = coeff. attrito viscosou(t)=k=0.50
Pendolo Semplice ideale:SIMULAZIONE EVOLUZIONE FORZATAIpotesi di simulazione:Schema di simulazione:MLqq&00= 2kg= 0.3m( t)=( t)=00rad / srad/sTempo di simulazione:210secu1( t)= δ − 1(t−1)Gradino unitario con ritardo di 1 sec.u( t)= sin( ϖ )2tSinusoidale, pulsazione 1 rad/sec.
<strong>Esercizio</strong> 5Massa-MollaMolla-Smorzatore(ammortizzatore)Equazione differenziale <strong>del</strong> moto:m ⋅ & x+ λ⋅x&+ k⋅x=uriscrivendo il sistema in una forma analitica più comoda:2&& x+ 2ρ ⋅ x&+ ω ⋅ x=02ω = k / m;2⋅ρ= λ / mSchema di simulazione:
Massa-MollaMolla-SmorzatoreEquazione differenziale <strong>del</strong> moto:m ⋅ & x+ λ⋅x&+ k⋅x=EQUAZIONI DI STATOEquazione dinamica in spazio di stato:u⎡x&⎢⎣x&y12=⎤⎥⎦=⎡⎢⎣−0k / mx⎢⎣x⎡[ ]1⎤1 0 * ⎥ ⎦21−λ/⎤ ⎡x*m⎥ ⎢⎦ ⎣x12⎤⎥⎦+⎡ 0 ⎤⎢ * u1/ m⎥⎣ ⎦⎡x⎢⎣x⎧ x&⎨⎩y12= x(t)⎤= x&( t)⎥⎦==A⋅xC⋅x++B⋅uD⋅uSchema di simulazione:
Massa-MollaMolla-Smorzatore:SIMULAZIONE EVOLUZIONE LIBERAIpotesi di simulazione:Schema di simulazione:m=1kgk= 1 Nλ=1, 2, 3x(0)= 1mv(0)/ m= 0 m / sN⋅s/mTempo di simulazione:30secu( t)=0
Massa-MollaMolla-Smorzatore:FUNZIONE DI TRASFERIMENTOEquazione:m ⋅ & x+ λ⋅x&+ k⋅x=uf.d.t. x/u:Ps)=(2m*s1+ λ * s+ kFUNZIONE DI TRASFERIMENTO:P(s)=2sω2n1/ ks+ 2* ζ *ωn+ 1⎧ ωn=⎪⎨⎪ζ =⎩ 2*k / mλk * mSchema di simulazione:
Massa-MollaMolla-Smorzatore:SIMULAZIONE EVOLUZIONE FORZATAIpotesi di simulazione:Schema di simulazione:Mk=2λ=1= 1kgN / mN⋅s/mx(0)= 0 mv(0)= 0 m / sTempo di simulazione:30secut)= δ−1(t),δ−( t),sin(ϖt)(2