Controllo Cinematico Inverso
Controllo Cinematico Inverso
Controllo Cinematico Inverso

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
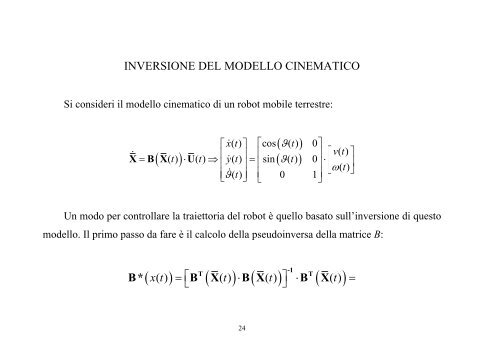
Indichiamo ora con U d(t)il vettore delle velocità da mandargli in ingresso, si avrà:Ud⎡xd() t ⎤⎡vt () ⎤ ⎡cos ( ϑ( t) ) sin ( ϑ( t) ) 0⎤() t =⎢yd()t⎥⎢ω() t⎥ = ⎢⎥⋅0 0 1 ⎢ ⎥⎣ ⎦ ⎣ ⎦ ⎢ ⎣ϑd() t ⎥ ⎦Esplicitando l’equazione ottenuta, si ricaveranno le equazioni caratteristiche delmodello cinematico nella sua forma inversa:⎧⎪ vd() t = x&d() t ⋅ cos( ϑd()) t + y&d() t ⋅sin( ϑ())t⎨ωd() t = &⎪⎩ ϑd()t
Volendo perciò graficare il modello cinematico del robot, in un interfaccia user-friendlycome quella del MatLab e Simulink si potrà osservare il modello cinematico inverso come:
Il sistema in catena diretta sarà perciò:
Ricordiamo in oltre che per avere un controllo efficiente il tempo di campionamentodovrebbe essere il più piccolo possibile, per avvicinarsi alla condizione di tempo continuo,in cui il robot sarebbe costantemente monitorato.E’ importante notare che seppur in teoria questo insieme di equazioni esprimono lalegge di controllo in catena aperta basata sull’inversione del modello cinematico, i risultatiche si ottengono implementandola realmente non sono stati soddisfacenti. Ciò è dovuto alfatto che il sistema è privo di retroazione, ad ogni passo, l’errore commesso si ripercuoteinvariato sui passi successivi, andandosi ad accumulare, fino ad un livello inaccettabile.
CONTROLLO BASATO SUL MODELLO CINEMATICO INVERSOCONTROLLORE DI PRIMO TENTATIVOCome già citato, non è pensabile di poter forzare un robot a seguire una traiettoriadesiderata, solo tramite il controllo in catena diretta.Si procederà perciò con l’aggiunta al sistema di un anello di retroazione.Un primo modo per introdurre una retroazione è quello di sostituire nella primaequazione caratteristica del modello cinematico inverso, il valore desideratodell’orientazione, con quello stimato dal sistema di localizzazione proprio del robot ad ognipasso; si aggiungerà in oltre nella seconda equazione caratteristica, un termine di controllo ditipo proporzionale all’errore di orientazione.A seguito di queste modifiche si avrà la seguente relazione:
⎧v( t)= x&d d( t)⋅ cosϑ(t)+ y&d( t)⋅sinϑ(t)⎨⎩ω( t)= &dϑd( t)+ Kϑ( ϑd( t)−ϑ(t))Con parametro di progetto da determinare sperimentalmente.K ϑ
Grazie alla retroazione inserita nel sistema, ora si avranno degli errori accettabili,questo però riguarda solo la questione dell’orientamento, grazie a questo tipo di retroazionenon è infatti possibile sopperire agli errori di posizione, che a questo livello non sono ancoracorretti da alcun termine di controllo.CONTROLLORE DI SECONDO TENTATIVOE’ ovvio che per ottenere risultati accettabili e un controllo di traiettoria che almenoteoricamente non dia problemi, perciò si andrà a sintetizzare un controllore basato sulmodello cinematica inverso che terrà conto anche dell’errore di posizione. Per fare questo siprocederà scomponendo un generico errore di posizione e in due componenti, una parallelaalla direzione longitudinale di avanzamento del veicolo, che chiameremo perciò erroretangenziale e t , l’altra componente sarà invece orientata perpendicolarmente al moto del
obot, e sarà pertanto detta errore normale e n . Si noti che l’errore tangenziale saràcontrollabile agendo sulla velocità angolare, mentre per ridurre l’errore normale si interverràmediante la velocità angolare.A fronte di queste nuove elaborazioni al modello iniziale, il controllore di secondotentativo avrà le seguenti equazioni caratteristiche:⎧vd( t)= x&d( t)⋅ cosϑ(t)+ y&d( t)⋅sinϑ(t)+ K⎨⎩ωd( t)= & ϑd( t)+ Kϑ( ϑd( t)−ϑ(t))+ Ken⋅enet⋅etCon Kete Kenparametri da determinare sperimentalmente.
In questo modo si avrà un controllo su tutte le variabili in ingresso al robot mobile. Lasoluzione ottenuta in questo modo sarà soddisfacente, soprattutto considerata la semplicitàdella tipologia di controllo.E’ importante notare che un controllo di questa tipologia è molto sensibile agli errori, diconseguenza basteranno uno scostamento dalla traiettoria di circa 10cm o di orientazione diπ16per avere la completa perdita di controllo sul robot, con conseguente abbandono dellamissione per prevenire danni.Tale “fragilità” del controllore soprattutto ad un possibile errore di orientazione è datenere molto in considerazione, soprattutto se ci si trova in ambienti dove la trasmissione deidati non avviene in maniera perfetta, in ambienti dove le condizioni fisiche del terreno sonosvantaggiose, con conseguente possibilità di slittamenti, o in presenza di urti.Sarà auspicabile avere a disposizione un controllore più efficace, che permetta diridurre ulteriormente gli errori, soprattutto quelli commessi sull’orientazione.