第1章ZLG/CF 驱动使用 - Read
第1章ZLG/CF 驱动使用 - Read
第1章ZLG/CF 驱动使用 - Read

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
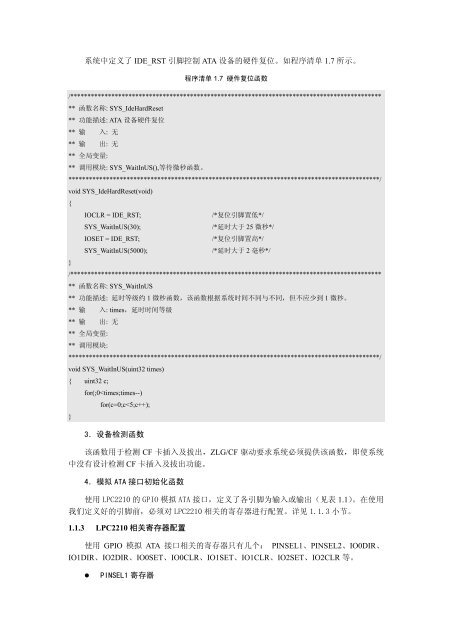
系统中定义了 IDE_RST 引脚控制 ATA 设备的硬件复位。如程序清单 1.7 所示。<br />
程序清单 1.7 硬件复位函数<br />
/*******************************************************************************************<br />
** 函数名称: SYS_IdeHardReset<br />
** 功能描述: ATA 设备硬件复位<br />
** 输 入: 无<br />
** 输 出: 无<br />
** 全局变量:<br />
** 调用模块: SYS_WaitInUS(),等待微秒函数。<br />
*******************************************************************************************/<br />
void SYS_IdeHardReset(void)<br />
{<br />
}<br />
IOCLR = IDE_RST; /*复位引脚置低*/<br />
SYS_WaitInUS(30); /*延时大于 25 微秒*/<br />
IOSET = IDE_RST; /*复位引脚置高*/<br />
SYS_WaitInUS(5000); /*延时大于 2 毫秒*/<br />
/*******************************************************************************************<br />
** 函数名称: SYS_WaitInUS<br />
** 功能描述: 延时等级约 1 微秒函数,该函数根据系统时间不同与不同,但不应少到 1 微秒。<br />
** 输 入: times,延时时间等级<br />
** 输 出: 无<br />
** 全局变量:<br />
** 调用模块:<br />
*******************************************************************************************/<br />
void SYS_WaitInUS(uint32 times)<br />
{ uint32 c;<br />
}<br />
for(;0