

Ãving 8 - NTNU
Ãving 8 - NTNU
Ãving 8 - NTNU

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
TTK 4140 Reguleringsteknikk m/elektriske kretser, Vår 2004<br />
Øving 8<br />
Utlevering: 26. mars<br />
Innlevering: 23. april kl. 14.30 i merket boks i kjelleren i B-blokka.<br />
Dette er ikke en formell dataøving, selv om den krever bruk av Matlab og Simulink.<br />
Øvingen kan betraktes som en ordinær regneøving i reguleringsteknikk. I uke 16, 17 og<br />
18 vil det derimot i forbindelse med Dataøving 2 være veiledning på datasalen (G116-<br />
G118, 17-20) i tillegg til den vanlige tiden på torsdager.<br />
Du trenger de ferdig lagede filene mopar.m,motor.m,plott.m, og smotor.mdl. De ligger alle i en<br />
zip-fil på http://www.itk.ntnu.no/fag/TTK4140/ovinger/, og kan lastes ned derfra.<br />
Likestrømsmotoren er beskrevet i Eksempel 9.8 i læreboka til Andresen, Balchen og Foss. For detaljert<br />
utledning av modellen henvises det til eksempel 2.8.<br />
v<br />
0<br />
e<br />
h r<br />
(s)<br />
u a<br />
MOTOR<br />
<br />
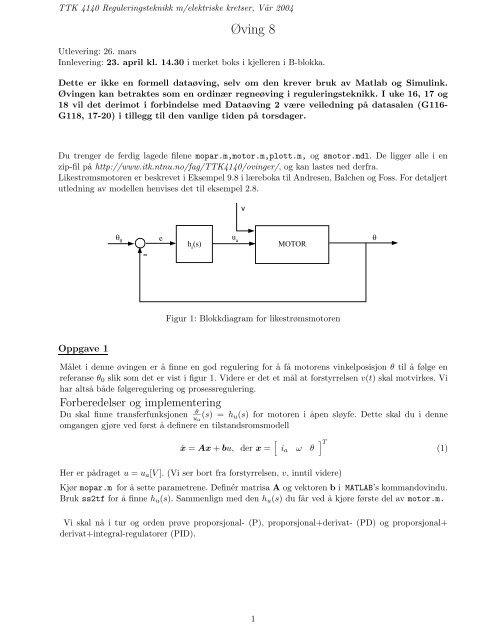
Figur 1: Blokkdiagram for likestrømsmotoren<br />
Oppgave 1<br />
Målet i denne øvingen er å finne en god regulering for å få motorens vinkelposisjon θ til å følge en<br />
referanse θ 0 slik som det er vist i figur 1. Videre er det et mål at forstyrrelsen v(t) skal motvirkes. Vi<br />
har altså både følgeregulering og prosessregulering.<br />
Forberedelser og implementering<br />
Du skal finne transferfunksjonen<br />
θ<br />
u a<br />
(s) = h u (s) for motoren i åpen sløyfe. Dette skal du i denne<br />
omgangen gjøre ved først å definere en tilstandsromsmodell<br />
[<br />
] T<br />
ẋ = Ax + bu, der x = i a ω θ<br />
(1)<br />
Her er pådraget u = u a [V ]. (Vi ser bort fra forstyrrelsen, v, inntil videre)<br />
Kjør mopar.m for å sette parametrene. Definér matrisa A og vektoren b i MATLAB’s kommandovindu.<br />
Bruk ss2tf for å finne h u (s). Sammenlign med den h u (s) du får ved å kjøre første del av motor.m.<br />
Vi skal nå i tur og orden prøve proporsjonal- (P), proporsjonal+derivat- (PD) og proporsjonal+<br />
derivat+integral-regulatorer (PID).<br />
1
Oppgave 2<br />
Proporsjonal-regulator (P-regulator)<br />
a) Dimensjonér proporsjonalregulatoren h r (s) = K p slik at:<br />
• ∆K ≥ 6dB<br />
• ψ ≥ 45 0<br />
Benytt deg av funksjonen margin i Matlab for å bestemme forsterknings- og fasemargin.<br />
b) Hva blir kryssfrekvensen ω c ?<br />
Hva blir |N(jω)| max i [dB]? Tips: Funksjonene feedback og max i Matlab.<br />
c) Simulér motoren med et enhetssprang i referansen θ 0 . (Ved simulering i denne oppgaven og i<br />
oppgave 3 og 4 bruker du smotor.mdl. Du må selv sette regulatorparametre.)<br />
d) Prøv med en K p som er mye mindre enn den dere fant i a), og en som er mye større.<br />
Hvordan går det med ∆K, ψ, ω c og |N(jω)| max for disse to verdiene av K p ? (Kvalitative svar er<br />
nok).<br />
e) Simulér motoren med disse to K p -verdiene (enhetssprang i θ 0 ) og kommentér tidsresponsene ut<br />
ifra de resultatene dere fant i forrige punkt.<br />
Vi skal nå undersøke systemets evne til å holde en referanse θ 0 = 0 når det samtidig påtrykkes et<br />
lastmoment v.<br />
f) Simulér motoren med et enhetssprang i v. Klarer utgangen å holde referansen θ = 0 nå?<br />
g) Undersøk og besvar hvordan større og mindre forsterkning K p innvirker på systemets evne til å<br />
holde referansen når det påfø res sprang i v.<br />
h) Hvilke motstridende krav ligger til grunn for valg av K p ?<br />
Legg ved besvarelsen én utskrift av en simulering.<br />
Oppgave 3<br />
Proporsjonal+derivat-regulator (PD-regulator)<br />
For å oppnå høyere båndbredde innfører vi en begrenset derivatvirkning i regulatoren slik at vi nå får:<br />
h r (s) = K p<br />
1 + 0.1s<br />
1 + 0.01s<br />
(2)<br />
a) Dimensjonér K p etter de samme krav til ∆K og ψ som før når vi bruker PD-regulatoren over.<br />
b) Hva blir ω c og |N(jω)| max nå ?<br />
c) Simuler systemet med enhetssprang i referansen θ 0 og sammenlign med responsen dere fikk med<br />
P-regulatoren. Er dette i samsvar med punkt b) over?<br />
d) Simulér systemet med et enhetssprang i v. Har vi oppnådd noen forbedringer i forhold til<br />
stasjonæravvik ved å innføre derivatvirkning? Forklar!<br />
2
Oppgave 4<br />
Proporsjonal+integral+derivat-regulator (PID-regulator)<br />
Vi skal nå innføre integralvirkning i regulatoren.<br />
h r (s) = K p<br />
(1 + T i s)(1 + 0.1s)<br />
T i s(1 + 0.01s)<br />
(3)<br />
Vi beholder den verdien av K p vi fant i forrige oppgave.<br />
a) Dimensjonér T i slik at kravene til ∆K og ψ opprettholdes samtidig som vi får raskest mulig undertrykkelse<br />
av stasjonæravviket ved sprang i v. Dette betyr at dere senker T i helt til integralvirkningens<br />
negative fase begynner å ødelegge fasemarginen. Jo mindre T i vi har, jo høyere lavfrekvent forsterkning<br />
i sløyfen får vi, dvs. raskere undertrykking av stasjonæravvik.<br />
b) Hva blir ω c og |N(jω)| max ?<br />
c) Simulér systemet med enhetssprang i θ 0 og sammenlign med P- og PD-regulatorene.<br />
d) Simulér systemet med enhetssprang i v og sammenlign med P- og PD-regulatorene.<br />
Oppgave 5<br />
Analyse av stajonæravvik ved hjelp av frekvensanalyse.<br />
Bruk sluttverditeoremet og transferfunksjonen fra forstyrrelsen v(s) til avviket e(s) til å forklare<br />
regulatoren i oppgave 4 sin evne til å undertrykke stasjonæravvik ved enhetssprang i v.<br />
3













