

Kapittel 1. Innledning - Institutt for teknisk kybernetikk - NTNU
Kapittel 1. Innledning - Institutt for teknisk kybernetikk - NTNU
Kapittel 1. Innledning - Institutt for teknisk kybernetikk - NTNU

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Forslag til Ut<strong>for</strong>ming <strong>for</strong> Eurobot 2002<br />
<strong>for</strong>andring i posisjonen vil gi en inkrementering i verdi i <strong>for</strong>hold til <strong>for</strong>rige verdi, og må<br />
der<strong>for</strong> leses ved oppstart av roboten. På det nåværende tidspunkt benytter roboten to<br />
inkrementelle encodere, en <strong>for</strong> hver motor på høyre og venstre side. For hver hele<br />
rotasjon sendes det ut in indeks-puls, som markerer en enkelt posisjon, og opptrer på en<br />
egen kanal fra encoderen.<br />
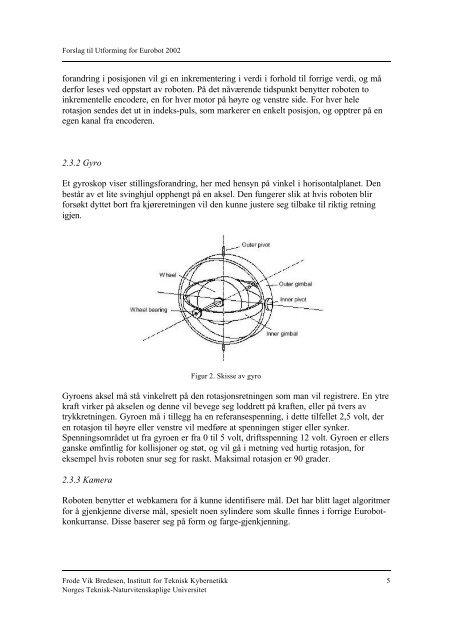
2.3.2 Gyro<br />
Et gyroskop viser stillings<strong>for</strong>andring, her med hensyn på vinkel i horisontalplanet. Den<br />
består av et lite svinghjul opphengt på en aksel. Den fungerer slik at hvis roboten blir<br />
<strong>for</strong>søkt dyttet bort fra kjøreretningen vil den kunne justere seg tilbake til riktig retning<br />
igjen.<br />
Figur 2. Skisse av gyro<br />
Gyroens aksel må stå vinkelrett på den rotasjonsretningen som man vil registrere. En ytre<br />
kraft virker på akselen og denne vil bevege seg loddrett på kraften, eller på tvers av<br />
trykkretningen. Gyroen må i tillegg ha en referansespenning, i dette tilfellet 2,5 volt, der<br />
en rotasjon til høyre eller venstre vil medføre at spenningen stiger eller synker.<br />
Spenningsområdet ut fra gyroen er fra 0 til 5 volt, driftsspenning 12 volt. Gyroen er ellers<br />
ganske ømfintlig <strong>for</strong> kollisjoner og støt, og vil gå i metning ved hurtig rotasjon, <strong>for</strong><br />
eksempel hvis roboten snur seg <strong>for</strong> raskt. Maksimal rotasjon er 90 grader.<br />
2.3.3 Kamera<br />
Roboten benytter et webkamera <strong>for</strong> å kunne identifisere mål. Det har blitt laget algoritmer<br />
<strong>for</strong> å gjenkjenne diverse mål, spesielt noen sylindere som skulle finnes i <strong>for</strong>rige Eurobotkonkurranse.<br />
Disse baserer seg på <strong>for</strong>m og farge-gjenkjenning.<br />
Frode Vik Bredesen, <strong>Institutt</strong> <strong>for</strong> Teknisk Kybernetikk<br />
Norges Teknisk-Naturvitenskaplige Universitet<br />
5













