O Controlador Quadcopter Atualizando o Firmware - Hobby King
O Controlador Quadcopter Atualizando o Firmware - Hobby King
O Controlador Quadcopter Atualizando o Firmware - Hobby King

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
O <strong>Controlador</strong> <strong>Quadcopter</strong><br />
Índice<br />
Introdução ao <strong>Quadcopter</strong><br />
Configurações de vôo ................................................ ........................ 2<br />
<strong>Atualizando</strong> o <strong>Firmware</strong> ............................................... ....................... 3<br />
Montar o controlador <strong>Quadcopter</strong> na sua <strong>Quadcopter</strong> .................. 8<br />
<strong>Quadcopter</strong> (+ Configuração )............................................. ................ 9<br />
Configurando o controlador de <strong>Quadcopter</strong> ............................................. ... 10<br />
Introdução ao controlador <strong>Quadcopter</strong><br />
O <strong>Hobby</strong><strong>King</strong> <strong>Quadcopter</strong> controlador é uma placa de controle de vôo para quatro aeronaves<br />
rotor (<strong>Quadcopter</strong>s).<br />
Sua finalidade é estabilizar a aeronave durante o vôo. Para fazer isso, ele pega o sinal dos três<br />
em giroscópios board (roll, pitch e yaw), em seguida, passa o sinal para o IC Atmega48PA. O IC<br />
Atmega48PA unidade então processa esses sinais de acordo com os usuários instalados<br />
software e passa sinais de controle para instalada <strong>Controlador</strong>es de Velocidade Eletrônico (CES).<br />
Estes sinais instruir o CES para fazer bem ajustes para a velocidade de rotação de motores que<br />
por sua vez stabalises seu <strong>Quadcopter</strong>.<br />
O <strong>Hobby</strong><strong>King</strong> <strong>Quadcopter</strong> controle bordo também usa os sinais de seu receptor sistemas de rádio<br />
(Rx) e passa estes sinais para o IC através do Atmega48PA ail, elementos, insumos e thr rud.<br />
Uma vez que este informação tem sido processada, o IC vai enviar sinais diferentes para o CES,<br />
que por sua vez, ajustar a velocidade de rotação de cada motor para induzir vôo controlado (para<br />
cima, para baixo, para trás, para frente, à esquerda, direito, yaw).<br />
Configurações de vôo<br />
As configurações de vôo <strong>Quadcopter</strong> depender de qual firmware é carregado no chip.<br />
Esta configuração é <strong>Quadcopter</strong> (4 Rotor configuração +).<br />
<strong>Atualizando</strong> o <strong>Firmware</strong><br />
A placa tem um chip <strong>Quadcopter</strong> Atmega48PA a bordo que permite aos usuários ajustar e carga não<br />
firmware padrão.<br />
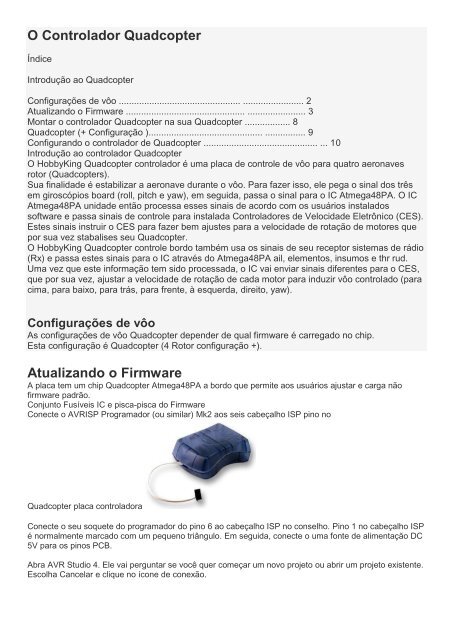
Conjunto Fusíveis IC e pisca-pisca do <strong>Firmware</strong><br />
Conecte o AVRISP Programador (ou similar) Mk2 aos seis cabeçalho ISP pino no<br />
<strong>Quadcopter</strong> placa controladora<br />
Conecte o seu soquete do programador do pino 6 ao cabeçalho ISP no conselho. Pino 1 no cabeçalho ISP<br />
é normalmente marcado com um pequeno triângulo. Em seguida, conecte o uma fonte de alimentação DC<br />
5V para os pinos PCB.<br />
Abra AVR Studio 4. Ele vai perguntar se você quer começar um novo projeto ou abrir um projeto existente.<br />
Escolha Cancelar e clique no ícone de conexão.
Ele vai abrir uma nova janela com um diálogo de conexão solicitando que você selecione o seu<br />
programador e porta de conexão. Com um programador como o mkII AVRISP é fácil, porque quando você<br />
seleciona programador que ele traz de volta apenas uma escolha de porta ... USB. O AVR-ISP500 de<br />
Olimex é reconhecido como um STK500 e tem a opção de auto escolha a porta. Se ele não reconhece a<br />
porta, você pode precisar definir manualmente a porta para o programador em suas configurações de<br />
dispositivo do Windows para COM1 até COM4 para AVR Studio para reconhecê-lo.<br />
Quando você escolheu seu programador e porta, clique em conectar e você será levado para o diálogo de<br />
programação AVR.<br />
Na janela de programação AVR vá para a aba "Main" e certifique-se que o chip que você está<br />
programando (por exemplo, Atmega48PA) é selecionado no "Dispositivo e Bytes Assinatura" no menu<br />
suspenso. Também certifique-se que o "configurações de programação de modo e alvo estão definidos<br />
para ISP. Certifique-se que as definições para o modo de ISP têm a freqüência ISP set baixo o suficiente<br />
para falar com o chip de freqüência. Programador pode definir para 115,2 kHz. Esta é completamente uma<br />
configuração importante começar bem. Se você clicar em "Leia Signature" e você terá a resposta<br />
"Signature partidas dispositivo selecionado" que conseguiram, com sucesso para se conectar à sua IC.
Também certifique-se que a meta de bordo ou PCB é alimentado (Você pode verificar isso clicando na<br />
guia Configurações HW e verificar se o programador pode ver qualquer tensão).<br />
Agora é hora de definir os fusíveis então clique em "fusíveis" tab. AVR Studio é muito bom a este respeito<br />
uma vez que irá trabalhar as configurações de fusíveis para o seu IC em particular, dependendo das<br />
opções caixa de seleção que você escolher.<br />
Definir as caixas de seleção de acordo com o seguinte.
SELFPRGEN: unchecked<br />
RSTDISBL: unchecked<br />
DWEN: unchecked<br />
SPIEN: checked<br />
WDTON: unchecked<br />
EESAVE: unchecked<br />
BODLEVEL: detecção de Brown-out no VCC = 1,8 V<br />
CKDIV8: unchecked<br />
CKOUT: unchecked<br />
SUT_CKSEL: Int. RC Osc. 8 MHz; Start-up tempo PWRDWN / RESET: 6 CK/14 CK + 65 ms<br />
A saída de ajustamento de espoletas será exibido na parte inferior da janela.<br />
Verifique o programa "Auto ler" "avisos inteligentes" e "Verificar após a programação" opções na parte<br />
inferior da janela e clique em.<br />
Se tudo correr como planejado, você deve obter mensagens de resposta OK na seção de saída na parte<br />
inferior da janela do seu para entrar no modo de Programação, escrevendo o endereço do fusível, fusível<br />
endereço leitura, verificação de pedaços de fusíveis e sair do modo de programação.<br />
Se você receber mensagens de erro, então verifique novamente o seu versão do chip e todas as conexões<br />
de seu programador para o conselho e que o aparelho está ligado. Também certifique-se que as<br />
definições do fusível são como descrito acima.<br />
Flash da <strong>Firmware</strong><br />
Clique no "Programa" guia e ter um olhar para o "Flash" seção que é a seção 2 para baixo. Marque a<br />
opção "Input HEX arquivo" caixa de seleção. Em seguida, procurar a pasta firmware descompactado e<br />
clique em seu arquivo HEX firmware adequado para o chip que você está programando para uma<br />
Atmega48PA. Clique em "Programa" na seção de Flash da janela e você deve obter uma resposta OK na
seção de saída na parte inferior da janela. Clique em "Verificar" para certificar-se que o programa foi<br />
enviado com sucesso e se você tiver uma resposta OK voltando na parte inferior da janela<br />
então você tem sucesso programado o IC com o programa de teste.<br />
Montar o controlador <strong>Quadcopter</strong> na sua <strong>Quadcopter</strong>.<br />
O controlador <strong>Quadcopter</strong> usa giroscópios Murata piezo que são menos sensíveis a vibração do que<br />
giroscópios tipo SMD, mas ainda é uma boa idéia para montar a placa sobre um material de<br />
amortecimento de vibrações. O conselho também deve ser montado com a seta branca voltada para a<br />
direção do vôo para a frente.<br />
Ao conectar o seu receptor de controle remoto (RX), você deve ligar o fio branco sinal dos canais (CH1,<br />
CH2, CH3 e CH4) do seu RX correspondente ao aileron, elevador do acelerador e leme para os pinos<br />
internos na placa, enquanto o vermelho (VCC) fios são conectados aos pinos centro, eo preto (GND) fios<br />
são conectados aos pinos na borda externa da placa.
Os pinos marcados M1 a M4 são conectados ao plug de 3 pinos BEC de sua CES. Eles seguem<br />
convenção thesame como os pinos RX com os fios brancos conectados aos pinos interior, os fios<br />
vermelhos para os pinos de centro e os fios de preto para os pinos externos. Os CES e os motores ligados<br />
estão ligados nos pinos M1 a M4 na seguinte ordem, dependendo da configuração de vôo rotor.<br />
Note-se também o sentido de rotação para cada motor. Isto é conseguido ligando os três fios ESC para os<br />
motores e troca de dois dos fios para atingir a rotação na direção oposta.<br />
<strong>Quadcopter</strong> (+ Configuration)<br />
Configurando o controlador de <strong>Quadcopter</strong><br />
1.Checking canais transmissor:
Tire-as hélices.<br />
-Ligue o transmissor e controlador de vôo.<br />
Set-acelerador para cerca de um quarto. Motors deve começar.<br />
Mova-pitch (elevador) vara para a frente. Voltar motor deve acelerar. Se não, reverter pitch (elevador) do<br />
canal.<br />
Mova-roll (aileron) vara para a esquerda. Do motor direito deve acelerar. Se não, canal reverso rolo<br />
(aileron).<br />
Mova-pau yaw (leme) para a esquerda. Motor dianteiro e traseiro deve acelerar. Se não, reverter yaw<br />
canal (leme).<br />
2. Ajuste do acelerador transmissor:<br />
- Ligue o transmissor e controlador de vôo.<br />
- Se levou não liga e fica ligado, diminuir o seu acabamento.<br />
- Se ainda não vá, pode ser necessário para inverter o canal do acelerador.<br />
- Braço seu conselho, colocando o direcional analógico esquerdo para baixo e à direita para o LED<br />
acenda. Se isso não acontecer, ajustar a sua aceleração e de guinada aparar para baixo e para a direita<br />
em seu transmissor. Certifique-se de que você não tem quaisquer opções de mistura no seu transmissor<br />
habilitado.<br />
3. Inicial transmissor ATV / servo configurações intervalo:<br />
- Pitch (elevador): 50%<br />
- Roll (aileron): 50%<br />
- Yaw (leme): 100%<br />
4. ESC faixa de aceleração:<br />
- Vire pote de guinada para zero.<br />
- Ligue o transmissor.<br />
- Throttle furar a cheia.<br />
- Ligue controlador de vôo.<br />
- Aguarde até que o beep CES duas vezes após o bip inicial. (Depende do que CES)<br />
- Stick do acelerador para fora. Beep CES.<br />
- Desligue controlador de vôo.<br />
- Restaurar o pote de guinada.<br />
5. Gyro valor inicial pot de ganho é de 50%. Aumentar até que ele começa a oscilar rapidamente, então<br />
recuar até estabilizar novamente. Vôo avanço rápido necessidades de ganho mais baixo.<br />
O ganho muito baixo é reconhecido pelo <strong>Quadcopter</strong> sendo difícil de controlar e / ou sempre querendo<br />
tombar.<br />
6. Verificação direções giroscópio:<br />
- Tire as hélices.<br />
- Ligue o transmissor e controlador de vôo.<br />
- Conjunto do acelerador para cerca de um quarto. Motors deve começar.<br />
- <strong>Quadcopter</strong> Tilt para a frente. Frente do motor deve acelerar. Se não, reverter gyro campo.<br />
- Tilt <strong>Quadcopter</strong> para a esquerda. Do motor esquerdo deve acelerar. Se não, reverter gyro roll.<br />
- Vire <strong>Quadcopter</strong> CW. Motor dianteiro e traseiro deve acelerar. Se não, reverter giroscópio guinada.<br />
7. Giroscópios reversão:<br />
- Definir pot ganho de rolo para zero.<br />
- Ligue controlador de vôo.<br />
- LED pisca rapidamente 10 vezes.<br />
- Mova a alavanca para o giroscópio que deseja inverter.<br />
- LED irá piscar continuamente.
- Desligue controlador de vôo.<br />
- Se houver giroscópios mais para ser revertida, vá para a etapa 2, pot ganhar mais conjunto de roll back.<br />
8.Final verificar:<br />
Coloque o quadcopter no chão, afaste-se uma distância segura e lentamente avançar para cerca de 1 / 2<br />
acelerador. Segure-se firme quando você começar a aumentar o acelerador, porque o controlador de<br />
<strong>Quadcopter</strong> calibra sua giroscópios quando a borboleta deixa zero, e depois os giroscópios necessidade<br />
de estar em repouso.<br />
Se o quadcopter tenta torcer longe, verifique hélice e motor direções, colocação giroscópio e<br />
configurações de acabamento. Um ligeiro toque é OK.<br />
Se não, tente torcer o quad. Deve resistir a seus movimentos. Ganhar mais gyro dá mais resistência.<br />
Se ele começa a oscilar, reduzir o ganho. Você não precisa reduzir o ganho abaixo de 40%.<br />
Nota: o procedimento correto para decolar do chão é o seguinte:<br />
1: O quad e suas hélices precisa ser imóvel.<br />
2: Aumentar o acelerador (coletiva). Assim como a borboleta deixa zero, calibração giroscópio é<br />
executada.<br />
3: Divirta-se! E lembre-se para fechar o acelerador se você perder o controle. Muito menos danos.<br />
NOTAS: Não use hélices maior do que você precisa. Hélices luz dá uma resposta mais rápida e mais<br />
estabilidade. Tentar obtê-lo a pairar a cerca de pau médio (03/01 a 2 / 3 do acelerador). Use hélice menor /<br />
maior, Kv motor diferente ou mais / menos células de bateria para conseguir isso.