

iv. controlul vectorial al vitezei motoarelor asincrone
iv. controlul vectorial al vitezei motoarelor asincrone
iv. controlul vectorial al vitezei motoarelor asincrone

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
IV. CONTROLUL VECTORIAL AL VITEZEI MOTOARELOR<br />
ASINCRONE<br />
Dacă în cazul reglării sc<strong>al</strong>are a <strong>vitezei</strong> variabilele de comandă (tensiuni, curenţi, fluxuri<br />
magnetice) sunt controlate numai în amplitudine, în cazul reglării <strong>vectori<strong>al</strong></strong>e, variabilele de comandă<br />
sunt controlate <strong>vectori<strong>al</strong></strong>, adică atât în modul cât şi în fază. Vectorii reprezentat<strong>iv</strong>i ai mărimilor de<br />
comandă pot fi controlaţi direct în modul şi fază sau indirect, prin <strong>controlul</strong> componentelor acestora<br />
într-un sistem de referinţă convenabil <strong>al</strong>es. În reprezentarea <strong>vectori<strong>al</strong></strong>ă a mărimilor controlate, se utilizează<br />
în prezent, în majoritatea cazurilor teoria fazorilor spaţi<strong>al</strong>i. Utilizând această teorie ca bază<br />
matematică pentru <strong>controlul</strong> <strong>vectori<strong>al</strong></strong> <strong>al</strong> <strong>vitezei</strong>, ecuaţiile care modelează maşina asincronă se pot<br />
scrie fie sub formă <strong>vectori<strong>al</strong></strong>ă dacă sunt folosiţi direct fazorii spaţi<strong>al</strong>i, fie sub formă matrici<strong>al</strong>ă, dacă<br />
se lucrează cu componentele acestora după axele referenţi<strong>al</strong>ului la care se face raportarea.<br />
Controlul <strong>vectori<strong>al</strong></strong> <strong>al</strong> motorului asincron constă în principiu în separarea componentelor act<strong>iv</strong>ă<br />
(care produce cuplul electromagnetic) şi react<strong>iv</strong>ă (care produce fluxul magnetic) <strong>al</strong>e curentului<br />
statoric şi în <strong>controlul</strong> independent <strong>al</strong> cuplului şi câmpului magnetic prin intermediul acestor componente,<br />
la fel ca la maşina de curent continuu cu excitaţie separată. În esenţă, modelul fizic corespunzător<br />
comenzii <strong>vectori<strong>al</strong></strong>e îl constituie motorul de curent continuu cu excitaţie separată, compensat.<br />
IV. 1. ANALOGIA DINTRE MODELUL MAŞINII ASINCRONE ŞI MAŞINA DE<br />
CURENT CONTINUU<br />
Modelul maÕinii <strong>asincrone</strong> bifazate la care se poate reduce modelul oric|rei maÕini<br />
de curent <strong>al</strong>ternat<strong>iv</strong> s-a n|scut din raÛiuni matematice, pentru a putea modela maÕina printr-un sistem<br />
de ecuaÛii simple din punct de vedere <strong>al</strong> tehnicii de c<strong>al</strong>cul (de preferat ecuaÛii cu coeficienÛi<br />
constanÛi). Pentru a re<strong>al</strong>iza cuplajul magnetic dintre stator Õi rotor cu relaÛii în care induct<strong>iv</strong>itatea nu<br />
mai variaz| în funcÛie de poziÛia rotorului, s-au introdus noile variabile de curenÛi ids Õi iqs (s-a procedat<br />
la utilizarea unui referenÛi<strong>al</strong> comun d-q). Pornind de la acest artificiu matematic Õi din<br />
interpretarea fizic| a modelului bifazat, s-a n|scut teoria unitar| a maÕinilor electrice Õi principiul<br />
metodelor de comand| reglabil| a maÕinilor de curent <strong>al</strong>ternat<strong>iv</strong>, principiul cunoscut sub denumirea<br />
de "orientarea dup| câmp".<br />
Exist| o maÕin| electric| la care acest model matematic este re<strong>al</strong>izat Õi fizic: maÕina de<br />
curent continuu. An<strong>al</strong>ogia dintre modelul bifazat <strong>al</strong> maÕinilor de curent <strong>al</strong>ternat<strong>iv</strong> Õi maÕina de<br />
curent continuu a f|cut posibil| conceperea unui procedeu de reglare standard, cu caracter profund<br />
gener<strong>al</strong>, în acÛion|rile electrice.<br />
Ψe<br />
s t a t o r<br />
^infasurare<br />
-<br />
'<br />
r<br />
x<br />
x<br />
x<br />
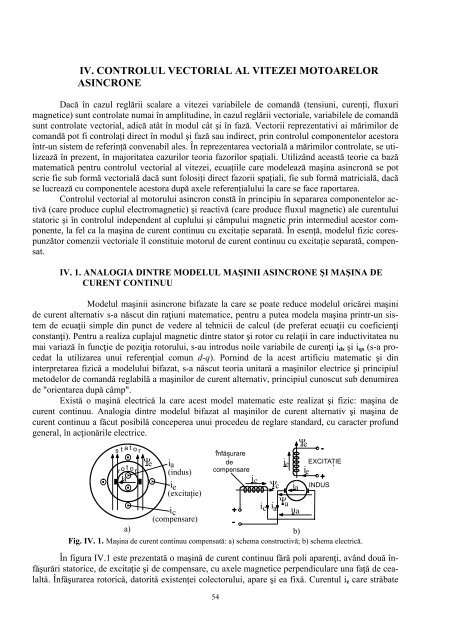
Fig. IV. 1. Maşina de curent continuu compensată: a) schema construct<strong>iv</strong>ă; b) schema electrică.<br />
o t o r<br />
ia<br />
Ψe<br />
ia<br />
(indus)<br />
ie<br />
(excitatie)<br />
'<br />
ic<br />
(compensare)<br />
de<br />
ie<br />
EXCITATIE<br />
compensare<br />
i '<br />
e<br />
ic<br />
Ψc<br />
ia<br />
INDUS<br />
Ψ<br />
i i a<br />
c a ua<br />
a)<br />
b)<br />
În figura IV.1 este prezentat| o maÕin| de curent continuu f|r| poli aparenÛi, având dou| înf|Õur|ri<br />
statorice, de excitaÛie Õi de compensare, cu axele magnetice perpendiculare una faÛ| de ce<strong>al</strong><strong>al</strong>t|.<br />
Înf|Õurarea rotoric|, datorit| existenţei colectorului, apare Õi ea fix|. Curentul ie care str|bate<br />
54
înf|Õurarea de excitaÛie, produce un câmp magnetic c|ruia îi corespunde vectorul spaÛi<strong>al</strong> Ψe. Pentru<br />
a se produce un cuplu electromagnetic în maÕin|, înf|Õurarea indusului (rotorului) trebuie s| fie parcurs|<br />
de un curent ia. Acest curent produce la rândul s|u un câmp de reacÛie Ψa, orientat perpendicular<br />
pe fluxul de excitaÛie, pe care îl deformeaz| (figura IV.2).<br />
Ψm<br />
necompensat<br />
Ψc<br />
ic<br />
im ie<br />
d<br />
Ψe<br />
compensat<br />
Câmpul rezultant este reprezentat prin vectorul Ψm (flux<br />
de magnetizare). PrezenÛa fluxului de reacÛie, este un fenomen<br />
nedorit. Din aceast| cauz|, câmpul de reacÛie produs de curentul<br />
rotoric se compenseaz| cu un câmp produs de înf|Õurarea de<br />
compensare, cu axa magnetic| în direcÛia fluxului de reacÛie a<br />
indusului. Aceasta produce un flux de aceeaÕi v<strong>al</strong>oare cu cel<br />
produs de indus, dar de sens invers.<br />
Ψc = −Ψa<br />
.<br />
(4.1)<br />
Prin compensarea reacţiei indusului, fluxul rezultant va<br />
Ψ i<br />
a a<br />
q<br />
Fig. IV.2. Diagrama <strong>vectori<strong>al</strong></strong>ă a<br />
maşinii de curent continuu perfect<br />
compensate.<br />
coincide cu fluxul de excitaţie Ψe (figura IV.2). Cuplul electromagnetic<br />
produs de maşină se poate scrie ca un produs <strong>vectori<strong>al</strong></strong><br />
M = k(<br />
ia<br />
× Ψ<br />
(4.2)<br />
e ) ,<br />
dintre vectorul spaÛi<strong>al</strong> de flux Ψe 1Õi vectorul spaÛi<strong>al</strong> de curent<br />
din indus ia, conform figurii IV.3 a), unde k este constanta<br />
construct<strong>iv</strong>| a maÕinii. Deoarece reacÛia indusului este compensat|,<br />
axa magnetic| a înf|Õur|rii rotorice este perpendicular| pe direcÛia fluxului de excitaÛie, astfel<br />
încât cuplul produs va fi maxim, având expresia:<br />
M = k Ψe<br />
ia<br />
,<br />
v<strong>al</strong>abilă atât în regim tranzitoriu, cât şi în regim staţionar.<br />
(4.3)<br />
M= kΨe<br />
ia M= p Ψm<br />
is<br />
sin β<br />
M=k( ia<br />
x Ψe<br />
) M= p(<br />
Ψfm<br />
x if<br />
s)<br />
Ψe<br />
π<br />
2<br />
ia<br />
a)<br />
b)<br />
Fig. IV.3. Vectorul cuplului electromagnetic definit ca produs <strong>vectori<strong>al</strong></strong>: a) maşina de curent continuu;<br />
b) maşina asincronă.<br />
Cuplul electromagnetic instantaneu dezvoltat de maşina asincronă bifazată poate fi scris sub<br />
forma (1.115), în care dacă se înlocuieşte curentul prin statoric prin compopnentele s<strong>al</strong>e (1.92), iar<br />
fluxul prin componentele din planul complex:<br />
Ψfm = Ψdm<br />
+ jΨqm<br />
,<br />
(4.4)<br />
se obţine pentru cuplul electromagnetic instantaneu expresia:<br />
M = p(Ψdmiqs<br />
− Ψqmids)<br />
.<br />
(4.5)<br />
Ţinând cont de interpretarea vectri<strong>al</strong>ă a mărimilor, cuplul istantaneu poate fi scris:<br />
M = p(<br />
Ψfm<br />
× ifs<br />
) ,<br />
(4.6)<br />
având modulul:<br />
M = pΨ<br />
m is<br />
sinβ .<br />
Unghiul β este conform figurii IV. 3, unghiul dintre fazorii reprezentat<strong>iv</strong>i ai fluxului şi curentului<br />
statoric. Deoarece nici una din mărimile din relaţia (4.7) nu depinde de referenţi<strong>al</strong>ul utilizat,<br />
nu s-a mai folosit indicele f. Rezultă concluzia că expresia sc<strong>al</strong>ară a cuplului electromagnetic nu depinde<br />
de sistemul de referinţă <strong>al</strong>es. Modulul cuplului este proporţion<strong>al</strong> cu aria par<strong>al</strong>elogramului format<br />
de cei doi fazori spaţi<strong>al</strong>i (Ψfm şi ifs).<br />
55<br />
ifs<br />
β<br />
Ψfm<br />
(4.7)
Dacă în relaţia (4.5) se anulează <strong>al</strong> doilea termen, expresia cuplului dezvoltat de maşina<br />
asincronă devine asemănătoare cu expresia cuplului maşinii de curent continuu (4.3). Expresia cuplului<br />
în forma (4.5), este v<strong>al</strong>abilă pentru orice poziţie a referenţi<strong>al</strong>ului comun d – q în spaţiu. În figura<br />
IV. 4, referenţi<strong>al</strong>ul este solidar cu statorul.<br />
M = p ( Ψd miqs - Ψq<br />
mids<br />
)<br />
M = p Ψm<br />
i<br />
Ψ-<br />
fm<br />
d +1<br />
Ψd<br />
m<br />
d +1<br />
Ψ-<br />
fm= Ψd<br />
m=<br />
Ψm<br />
Θf<br />
axa de<br />
referinta-<br />
'<br />
a<br />
-i fs ids<br />
-i<br />
fs<br />
ids<br />
q<br />
+j iqs<br />
Ψqm<br />
b<br />
iA=<br />
i qs<br />
a)<br />
q<br />
b)<br />
+j<br />
Fig. IV.4. Expresia cuplului maşinii <strong>asincrone</strong>: a) într-un referenţi<strong>al</strong> solidar cu statorul;<br />
b) într-un referenţi<strong>al</strong> solidar cu fluxul magnetic.<br />
Orientând axa d re<strong>al</strong>ă a referenţi<strong>al</strong>ului comun după direcţia fluxului magnetic rezultant Ψfm<br />
(ca în figura IV.4. b)), componenta imaginară a fluxului Ψqm se anulează, rezultând:<br />
Ψfm = Ψdm<br />
= Ψm<br />
.<br />
(4.8)<br />
Expresia cuplului electromagnetic pentru noua poziţie a referenţi<strong>al</strong>ului devine:<br />
M = pΨ<br />
m iA<br />
,<br />
(4.9)<br />
în care iA = iqs este componenta act<strong>iv</strong>ă a curentului statoric. Fiind perpendiculară pe direcţia fluxului,<br />
contribuie la producerea cuplului electromagnetic.<br />
An<strong>al</strong>ogia dintre modelul maşinii <strong>asincrone</strong> şi modelul maşinii de curent continuu se vede<br />
foarte clar dacă se compară relaţiile (4.3) şi (4.9), relaţii în care sunt puse în evidenţă contribuţia curentului<br />
act<strong>iv</strong> pe de o parte şi contribuţia fluxului magnetic pe de <strong>al</strong>tă parte, la producerea cuplului<br />
electromagnetic.<br />
Precizare. În cazul maşinilor <strong>asincrone</strong> trifazate, în expresia cuplului electromagnetic, numărul<br />
de perechi de poli ai maşinii p, se înlocuieşte cu coeficientul (3/2)p, an<strong>al</strong>ogia dintre modelul<br />
bifazat <strong>al</strong> maşinii trifazate şi maşina de curent continuu rămânând v<strong>al</strong>abilă.<br />
Metoda <strong>controlul</strong>ui “orientat după câmp” (<strong>controlul</strong>ui <strong>vectori<strong>al</strong></strong>), se bazează pe an<strong>al</strong>ogia dintre<br />
maşina asincronă şi maşina de curent continuu. Pentru aceasta, se explicitează mărimile cu ajutorul<br />
cărora se pot controla separat cele două componente care produc cuplul, re<strong>al</strong>izând <strong>controlul</strong><br />
magnetic şi mecanic <strong>al</strong> maşinii. Se poate re<strong>al</strong>iza în acest mod reglarea maşinii în curent continuu, cu<br />
performanţe ridicate.<br />
IV.2. PRINCIPIUL ORIENTĂRII DUPĂ CÂMP A MAŞINII ASINCRONE<br />
Utilizarea maÕinii <strong>asincrone</strong> în sistemele de acÛionare reglabile conduce la o serie de probleme<br />
impuse de <strong>al</strong>imentarea maÕinii de la convertoarele statice de frecvenÛ|, precum Õi de complexitatea<br />
regl|rii. Dintre acestea, cea mai important| este reglarea Õi <strong>controlul</strong> cuplului electromagnetic.<br />
Caracterul convertorului de <strong>al</strong>imentare impune m|rimea de reglare (tensiune sau curent de ieÕire) Õi<br />
în funcÛie de <strong>al</strong>goritmul de control, evoluÛia fazorului spaÛi<strong>al</strong> <strong>al</strong> tensiunii sau curentului statorului<br />
maÕinii <strong>asincrone</strong>.<br />
Procedeele de reglare bazate pe principiul orient|rii dup| câmp pe lâng| faptul c| permit reglarea<br />
cuplului cu performanÛe ridicate (inerÛie mic| Õi bine amortizat), au un caracter sistematic Õi<br />
gener<strong>al</strong>.<br />
56<br />
A
Dup| cum s-a v|zut anterior, maÕina de curent continuu cu excitaÛie separat| Õi perfect compensat|<br />
este prin construcÛie "orientat| dup| câmp". Acesta este mot<strong>iv</strong>ul pentru care această maşină<br />
poate fi considerat| maÕin| de referinÛ|. Aplicarea principiului orient|rii dup| câmp unei maÕini cu<br />
câmp învârtitor impune an<strong>al</strong>ogia acesteia cu maÕina de referinÛ|. Principiul orient|rii dup| câmp se<br />
bazeaz| pe an<strong>al</strong>ogia maÕinii de curent <strong>al</strong>ternat<strong>iv</strong> (cu câmp învârtitor) cu maÕina de curent continuu,<br />
re<strong>al</strong>izând separarea <strong>controlul</strong>ui m|rimilor mecanice de cele magnetice, ceea ce conduce în fin<strong>al</strong> la<br />
dou| bucle de reglare independente, cu m|rimi de reglare în curent continuu.<br />
Sistem de<br />
axe orientat<br />
dupa flux<br />
-i<br />
s<br />
d +1<br />
Ψ<br />
-m<br />
idsα = im<br />
α<br />
a<br />
b<br />
-ir<br />
= i qs<br />
q<br />
+j<br />
α<br />
ωr<br />
M = p Ψm ir<br />
M = (3/2) pΨm<br />
ir<br />
stator<br />
i-<br />
r<br />
rotor<br />
(bifazat)<br />
(trifazat)<br />
Fig. IV.5. Diagrama fazori<strong>al</strong>ă expli-<br />
cat<strong>iv</strong>ă pentru aplicarea principiului<br />
orientării după câmp la maşina<br />
asincronă.<br />
În figura IV.5, se prezint| descompunerea fazorului de<br />
curent statoric într-un referenÛi<strong>al</strong> orientat dup| fluxul de magnetizare<br />
Ψm. De aici rezult| c| direcÛia fluxului determin| cele dou|<br />
componente <strong>al</strong>e curentului - act<strong>iv</strong>| Õi react<strong>iv</strong>| - care separ| în<br />
maÕin| fenomenele mecanice de cele magnetice, fapt care constituie<br />
esenÛa principiului orient|rii dup| câmp.<br />
Precizare. În cele ce urmează, deoarece studiul maşinii se<br />
face în referenţi<strong>al</strong>ul comun d - q, pentru simplificarea scrierii, se<br />
va renunţa la indicele f, utilizat pentru a preciza mărimile corespunzătoare<br />
acestui referenţi<strong>al</strong> comun.<br />
Componenta react<strong>iv</strong>| ids este orientat| pe direcÛia fluxului<br />
învârtitor, iar componenta act<strong>iv</strong>| iqs, este perpendicular| pe aceast|<br />
direcÛie.<br />
Precizare. Axele magnetice <strong>al</strong>e înfăşurărilor statorice<br />
<strong>al</strong>e maşinii <strong>asincrone</strong> bifazate sau <strong>al</strong>e maşinii <strong>asincrone</strong> trifazate<br />
modelate într-un referenţi<strong>al</strong> d – q comun sunt perpendiculare.<br />
Dacă prin înfăşurarea cu axa magnetică coliniară cu axa d circulă<br />
curentul ids = im, acest curent va produce fluxul de magnetizare<br />
<strong>al</strong> maşinii Ψm, în aceeaşi direcţie. Prin an<strong>al</strong>ogie cu maşina<br />
de curent continuu, curentul ids corespunde curentului de excitaţie ie. Curentul rotoric, necesar producerii<br />
cuplului electromagnetic, apare în cazul maşinii <strong>asincrone</strong> ca urmare a fenomenului de inducţie<br />
electromagnetică, fapt care presupune o variaţie a fluxului magnetic, ceea ce la maşina asincronă<br />
este un fenomen evident, din cauzele precizare anterior. Rotorul fiind în scurtcircuit, tensiunea<br />
electromotoare indusă în înfăşurările s<strong>al</strong>e va produce curentul ir, <strong>al</strong> cărui vector spaţi<strong>al</strong> este<br />
perpendicular pe direcţia fluxului de magnetizare Ψm. Dar suma <strong>vectori<strong>al</strong></strong>ă a curenţilor dă curentul<br />
de magnetizare im în direcţia fluxului. Rezultă în consecinţă: ir = -iqs. Interacţiunea dintre fluxul de<br />
magnetizare Ψm şi curentul rotoric ir produce cuplul electromagnetic <strong>al</strong> maşinii <strong>asincrone</strong>. Curentului<br />
de compensare ic îi corespunde curentul statoric iqs, care anihilează efectul curentului de sarcină<br />
care tinde să deformeze fluxul Ψm. Curenţii statorici, sunt reprezentaţi prin vectorul spaţi<strong>al</strong> is,<br />
care are două componente:<br />
- componenta react<strong>iv</strong>ă, care produce câmpul:<br />
iR = ids<br />
= im<br />
;<br />
(4.10)<br />
- componenta act<strong>iv</strong>ă, care produce cuplul, eg<strong>al</strong>ă în modul cu curentul rotoric:<br />
iA =<br />
iqs<br />
= −ir<br />
.<br />
(4.11)<br />
Având în vedere faptul că maşina asincronă se <strong>al</strong>imentează prin stator, curentul rotoric ia<br />
naştere liber prin fenomenul de inducţie, astfel încât întotdeauna va exista eg<strong>al</strong>itatea (4.11). Prin<br />
aceasta va exista şi perpendicularitatea dintre Ψm şi ir. Se poate afirma că maşina asincronă se autocompensează.<br />
Figura IV.6. prezintă schema bloc corespunzătoare unui sistem de reglare având la bază<br />
principiul orientării după câmp a maşinii <strong>asincrone</strong>, <strong>al</strong>imentată de la un convertor static de frecvenţă.<br />
În această figură sunt puse în evidenţă cele două bucle de reglare: a componentei act<strong>iv</strong>e (cu efecte<br />
mecanice – ωr) şi respect<strong>iv</strong> a componentei react<strong>iv</strong>e (cu efecte magnetice – Ψm) <strong>al</strong>e curentului statoric.<br />
57
ωr*<br />
+<br />
-<br />
*<br />
Ψm<br />
Σ<br />
+<br />
Σ<br />
-<br />
REGULATOR<br />
DE VITEZA<br />
REGULATOR<br />
DE FLUX<br />
ir<br />
= i qsα<br />
act<strong>iv</strong><br />
i m = idsα<br />
react<strong>iv</strong><br />
ωr<br />
SISTEM DE REGLARE<br />
ORIENTATA<br />
DUPA CAMP<br />
Fig. IV.6. Schema de principiu a sistemului de reglare după câmp.<br />
q<br />
+j<br />
sistem d-q<br />
solidar cu statorul<br />
-i<br />
s<br />
Ψ-<br />
α<br />
d<br />
+1<br />
ids<br />
iqs<br />
iqsα<br />
q<br />
Fig. IV.7. Diagramele fazori<strong>al</strong>e +j înainte şi după reglare.<br />
Pentru a aplica principiul orientării după câmp, este necesar să se cunoască poziţia fluxului<br />
de magnetizare (conform figurii IV.7). Componentele Ψd şi Ψq <strong>al</strong>e fluxului într-un sistem de axe d –<br />
q solidar cu statorul se obţin prin c<strong>al</strong>cul sau prin măsurare. Modulul fazorului de flux dat de:<br />
2 2<br />
Ψ Ψ<br />
(4.12)<br />
d Ψq<br />
,<br />
va permite c<strong>al</strong>culul funcţiilor:<br />
(4.13)<br />
Blocul care c<strong>al</strong>culează modulul fluxului (4.12) şi poziţia acestuia (4.13) este an<strong>al</strong>izorul de<br />
fazor AF, prezentat în figura IV.8.<br />
+ =<br />
Ψ<br />
Ψ<br />
d<br />
q<br />
cosα = ; sinα = .<br />
Ψ<br />
Ψ<br />
Ψd<br />
Ψq<br />
2<br />
Ψ<br />
x d<br />
+ 2<br />
Σ Ψ<br />
2<br />
Ψq<br />
+<br />
x<br />
Ψ<br />
ANALIZOR DE FAZOR<br />
cos α<br />
Ψ<br />
sin α<br />
a)<br />
b)<br />
Fig. IV.8. Blocul an<strong>al</strong>izor de fazor: a) diagrama structur<strong>al</strong>ă; b) simbolul blocului.<br />
Cunoscând poziţia α a fazorului de flux, se poate efectua transformarea de axe din figura<br />
IV.9, în urma căreia se obţin mărimi orientate după flux.<br />
Din punct de vedere matematic, este vorba de rotirea sistemului de axe cu unghiul α, cu ajutorul<br />
operatorului de rotaţie [TA(α)], conform (1.37).<br />
Mărimile orientate după câmp se pot exprima în funcţie de cele <strong>al</strong>e modelului bifazat fix,<br />
prin relaţiile:<br />
⎧idsα<br />
=<br />
idscosα<br />
+ iqssinα<br />
⎨<br />
.<br />
i i sinα i cosα<br />
(4.14)<br />
⎩ qsα = − ds + qs<br />
58<br />
sistem d-q<br />
orientat<br />
-i<br />
s<br />
Ψd<br />
Ψq<br />
Ψm<br />
TRADUCTOR<br />
DE FLUX<br />
d +1<br />
Ψ-<br />
idsα<br />
is<br />
TRADUCTOR<br />
DE VITEZA<br />
AF<br />
α<br />
~<br />
RETEA<br />
'<br />
axa de<br />
referinta<br />
fixa<br />
Ψ =<br />
Ψd<br />
Ψq<br />
= cos α sin α =<br />
Ψ<br />
Ψ<br />
CONVERTOR<br />
STATIC DE<br />
FRECVENTA<br />
U1 ; f1 MASINA<br />
ASINCRONA<br />
2 2<br />
Ψd<br />
+ Ψq
q<br />
+j<br />
sistem d-q<br />
solidar cu statorul<br />
d<br />
+1 sistem d-q d +1<br />
orientat<br />
Ψ- α<br />
Ψ-<br />
-i s i<br />
i<br />
ds<br />
-s<br />
iqs<br />
iqsα<br />
q<br />
+j<br />
Fig. IV.9. Fazorul de curent înainte şi după transformarea de axe.<br />
Operaţiile de transformare de axe (4.14) sunt efectuate de blocul TA (figura IV.10 a) –<br />
diagrama structur<strong>al</strong>ă, b) – simbolul blocului), care poate fi an<strong>al</strong>ogic sau numeric.<br />
ids<br />
i<br />
qs<br />
cos α<br />
x x<br />
x<br />
x<br />
sin α<br />
ids<br />
cos α<br />
i<br />
qs<br />
sin α + idsα<br />
+<br />
Σ<br />
ids<br />
sin α<br />
i<br />
qs<br />
cos α<br />
TRANSFORMARI DE AXE<br />
-<br />
Σ<br />
i<br />
qsα<br />
+<br />
a) b)<br />
Fig. IV.10. Blocul care re<strong>al</strong>izează transformarea de axe: a) diagrama structur<strong>al</strong>ă; b) simbolul blocului.<br />
Cu ajutorul blocurilor AF şi TA, se pot concepe şi re<strong>al</strong>iza scheme de comandă pentru maşinile<br />
<strong>asincrone</strong> după principiul orientării după câmp. Conform acestui principiu, mărimile de comandă<br />
sunt componentele curentului statoric. Din acest mot<strong>iv</strong>, cea mai simplă schemă de comandă este<br />
aceea la care comanda se re<strong>al</strong>izează în curent, conform figurii IV.11.<br />
~<br />
M A R I M I D E R E G L A R E<br />
RETEA<br />
*<br />
im<br />
=<br />
*<br />
idsα<br />
react<strong>iv</strong><br />
* *<br />
- ir<br />
= i iqsα<br />
act<strong>iv</strong><br />
Ψm<br />
fluxul de<br />
orientare<br />
MARIMI<br />
ORIENTATE<br />
-<br />
DUPA CAMP<br />
(marimi de c.c.)<br />
[TA(- α)]<br />
AF<br />
i*<br />
ds<br />
i i*<br />
qs<br />
Ψd<br />
m<br />
Ψqm<br />
Fig. IV.11. Principiul <strong>controlul</strong>ui în curent a maşinii <strong>asincrone</strong> pe baza orientării după câmp, cu<br />
măsurarea directă a fluxului.<br />
Statorul maşinii este <strong>al</strong>imentat de la un convertor static de frecvenţă cu caracter de sursă de<br />
curent CSI. Blocul AF primeşte informaţii în urma măsurării fluxului din întrefier după direcţiile or-<br />
59<br />
ids<br />
i<br />
qs<br />
cos α sin α<br />
ids<br />
ANALIZOR<br />
DE FAZOR<br />
TRANSFORMARI<br />
DE AXE<br />
traductoare<br />
de flux<br />
idsα<br />
cos α<br />
C S I<br />
MARIMI IN SISTEMUL<br />
DE AXE STATORICE<br />
(marimi de c.a.)<br />
α<br />
[ TA( α)<br />
]<br />
i iqs<br />
R OTO R<br />
T<br />
S T A<br />
axa de<br />
referinta<br />
fixa<br />
sin α<br />
idsα<br />
i<br />
qsα<br />
Convertor<br />
static de curent<br />
f1 O R<br />
Masina<br />
asincrona
togon<strong>al</strong>e d – q şi furnizează informaţii cu pr<strong>iv</strong>ire la poziţia fazorului de flux Ψm. Blocul TA are rolul<br />
de a transforma sistemul d – q orientat după flux, în sistemul d – q solidar cu statorul, c<strong>al</strong>culând mărimile<br />
de comandă ids şi iqs din mărimile impuse, orientate după flux:<br />
- curentul de magnetizare (react<strong>iv</strong>):<br />
(4.15)<br />
- curentul rotoric (act<strong>iv</strong>):<br />
(4.16)<br />
Transformarea este în sens invers faţă de cea descrisă de relaţia (4.14). Acesta este mot<strong>iv</strong>ul<br />
pentru care argumentul este negat<strong>iv</strong>.<br />
Dacă convertorul static de frecvenţă are caracterul unei surse de tensiune CSU ca în figura<br />
IV.12, mărimile de comandă pentru tensiune u * ds şi u * qs se c<strong>al</strong>culează din mărimile de comandă <strong>al</strong>e<br />
curenţilor i * ds şi i * * * *<br />
ids<br />
= im<br />
= iR<br />
;<br />
* * *<br />
iqs<br />
= −ir<br />
= iA<br />
;<br />
qs. Acestea din urmă rezultă din blocul TA care efectuează o transformare de axe<br />
pentru mărimile de control impuse (componet<strong>al</strong>e act<strong>iv</strong>ă şi respect<strong>iv</strong> react<strong>iv</strong>ă <strong>al</strong>e curentului statoric),conform<br />
relaţiilor (4.15) şi (4.16).<br />
~<br />
RETEA<br />
*<br />
im<br />
=<br />
*<br />
idsα<br />
react<strong>iv</strong><br />
* *<br />
- ir<br />
= i iqsα<br />
act<strong>iv</strong><br />
Ψm<br />
fluxul de<br />
orientare<br />
MARIMI<br />
ORIENTATE<br />
DUPA CAMP<br />
(marimi de c.c.)<br />
M A R I M I D E R E G L A R E<br />
[TA(-α)]<br />
cos α sin α<br />
AF<br />
ANALIZOR<br />
DE FAZOR<br />
TRANSFORMARI<br />
DE AXE<br />
i*<br />
ds i i*<br />
qs<br />
CALCULUL<br />
TENSIUNII<br />
CU<br />
u*<br />
ds<br />
u*<br />
qs<br />
Ψd<br />
m<br />
Ψqm<br />
Fig. IV.12. Principiul <strong>controlul</strong>ui în tensiune a maşinii <strong>asincrone</strong> pe baza orientării după câmp, cu<br />
măsurarea directă a fluxului.<br />
Tensiunea statorică se c<strong>al</strong>culează cu re<strong>al</strong>aţia (1.77), unde:<br />
Ψs = Ψm<br />
+ Ψσs<br />
= Ψm<br />
+ Lσsi<br />
s ,<br />
(4.17)<br />
din care, prin descompunerea pe cele două axe <strong>al</strong>e referenţi<strong>al</strong>ului d – q, se vor obţine relaţiile:<br />
( )<br />
(4.18)<br />
( )<br />
Aceste re<strong>al</strong>aţii sunt implementate de blocul de c<strong>al</strong>cul <strong>al</strong> tensiunii CU, conform figurii IV.13<br />
(diagrama structur<strong>al</strong>ă – a) şi simbolul blocului b)).<br />
Studiind ecuaţiile de funcţionare <strong>al</strong>e maşinii <strong>asincrone</strong> şi diagrama fazori<strong>al</strong>ă, se poate constata<br />
că din cei trei fazori spaţi<strong>al</strong>i Ψm, us şi is, dacă se cunosc doi, <strong>al</strong> treilea se poate în principiu determina.<br />
Este posibil să se re<strong>al</strong>izeze o schemă de control cu orientare după câmp fără a se măsura<br />
direct fluxul din întrefier. Este în schimb necesar a se măsura curentul şi tensiunea statorică.<br />
Componentele fluxului de magnetizare Ψm, din relaţia (4.17) se pot scrie:<br />
(4.19)<br />
.<br />
⎧<br />
d<br />
⎪<br />
uds<br />
= Rsi<br />
ds + Ψdm<br />
+ Lσsi<br />
ds<br />
dt<br />
⎨<br />
d<br />
⎪uqs<br />
= Rsi<br />
qs + Ψqm<br />
+ Lσsi<br />
qs<br />
⎩<br />
dt<br />
⎧Ψdm<br />
=<br />
Ψds<br />
− Ψσds<br />
= Ψds<br />
− Lσsi<br />
ds<br />
⎨<br />
,<br />
⎩<br />
Ψqm<br />
= Ψqs<br />
− Ψσqs<br />
= Ψqs<br />
− Lσsi<br />
qs<br />
60<br />
traductoare<br />
de flux<br />
MARIMI IN SISTEMUL<br />
DE AXE STATORICE<br />
(marimi de c.a.)<br />
uds<br />
C S U Convertor<br />
static de<br />
tensiune<br />
uqs<br />
R OTO R<br />
S<br />
T A TO<br />
R<br />
f 1<br />
Masina<br />
asincrona
ids<br />
iqs<br />
Rs<br />
dΨds<br />
Ψ d Ψds<br />
+<br />
L σ<br />
s<br />
s<br />
σ Σ<br />
dt<br />
+ +<br />
Σ<br />
+<br />
dΨqs<br />
Ψσ<br />
qs<br />
Ψqs<br />
Lσs<br />
+<br />
Σ<br />
dt<br />
+<br />
Σ<br />
+<br />
+<br />
Rs<br />
Ψdm<br />
CALCULUL TENSIUNII<br />
Ψqm<br />
Fig. IV.13. Blocul c<strong>al</strong>culatorului de tensiune: a) diagrama structur<strong>al</strong>ă; b) simbolul blocului.<br />
în care fluxul statoric se c<strong>al</strong>culează din relaţia (4.17), prin integrare:<br />
Ψ<br />
ds<br />
=<br />
t<br />
61<br />
uds<br />
uqs ids<br />
i iqs<br />
CU<br />
uds<br />
uqs<br />
(4.20)<br />
Operaţiile descrise de (4.19) şi (4.20) sunt efectuate de blocul de c<strong>al</strong>cul <strong>al</strong> fluxului CΨm din<br />
figura IV.14.<br />
uds<br />
uqs<br />
ids<br />
iqs<br />
+<br />
Σ<br />
-<br />
+<br />
Σ<br />
-<br />
Rs<br />
Fig. IV.14. Blocul de c<strong>al</strong>cul <strong>al</strong> fluxului din întrefier: a) diagrama structur<strong>al</strong>ă; b) simbolul blocului.<br />
Schema de reglare cu c<strong>al</strong>culul fluxului (măsurare indirectă) este prezentată în figura IV.15.,<br />
în care fluxul de orientare este c<strong>al</strong>culat cu blocul CΨm, care primeşte informaţii despre tensiunile şi<br />
curenţii statorici măsuraţi.<br />
Fig. IV.15. Principiul comenzii în curent a maşinii <strong>asincrone</strong> pe baza orientării după câmp, cu măsurarea<br />
indirectă a fluxului.<br />
Ψdm<br />
a) b)<br />
∫(<br />
uds<br />
− Rsi<br />
ds ) dt ; Ψqs<br />
= ∫ ( uqs<br />
− Rsi<br />
qs )<br />
0<br />
dΨds<br />
dt<br />
dΨqs<br />
dt<br />
Rs Lσs<br />
*<br />
im<br />
=<br />
*<br />
idsα<br />
react<strong>iv</strong><br />
* *<br />
- ir<br />
= i iqsα<br />
act<strong>iv</strong><br />
Ψm<br />
fluxul de<br />
orientare<br />
MARIMI<br />
ORIENTATE<br />
DUPA CAMP<br />
(marimi de c.c.)<br />
Lσs<br />
Ψds<br />
Ψqs<br />
Ψσ<br />
ds<br />
+<br />
Σ<br />
-<br />
+<br />
Σ<br />
-<br />
Ψσ<br />
qs<br />
CALCULUL FLUXULUI Ψm<br />
t<br />
0<br />
Ψdm<br />
Ψqm<br />
uds<br />
uqs<br />
ids<br />
i iqs<br />
dt .<br />
CΨm<br />
a) b)<br />
M A R I M I D E R E G L A R E<br />
[TA(-α)]<br />
cos α sin α<br />
AF<br />
ANALIZOR<br />
DE FAZOR<br />
TRANSFORMARI<br />
DE AXE<br />
i*<br />
ds<br />
i i*<br />
qs<br />
Ψdm<br />
Ψ CΨm qm<br />
ids<br />
iqs<br />
uds<br />
uqs<br />
MARIMI IN SISTEMUL<br />
DE AXE STATORICE<br />
(marimi de c.a.)<br />
~ RETEA<br />
C S I<br />
R OTO R<br />
S<br />
T A TO<br />
R<br />
Convertor<br />
static de curent<br />
f1 Masina<br />
asincrona<br />
Ψqm<br />
YΨ dm<br />
Ψqm
După cum s-a precizat anterior, mărimile de reglare sunt componentele act<strong>iv</strong>ă şi react<strong>iv</strong>ă <strong>al</strong>e<br />
curentului, prin intermediul cărora pot fi controlate independent cele două mărimi care produc cuplul<br />
electromagnetic: fluxul din întrefier prin intermediul curentului im şi curentul rotoric ir. Schema<br />
cea mai direct corelată cu principiul orientării după câmp este cea cu comanda în curent a maşinii <strong>asincrone</strong>.<br />
Din această cauză, schema din figura IV.11 este mai simplă decât cea din figura IV.12, cu<br />
comanda în tensiune, deoarece tensiunea este o mărime care participă indirect la producerea cuplului<br />
electromagnetic.<br />
Pe lângă aceasta, măsurarea directă a fluxului conduce la scheme mai simple (figura IV.11),<br />
faţă de cele la care fluxul se determină indirect din curent şi tensiune, prin intermediul traductoarelor<br />
(figura IV.15).<br />
IV.3. SISTEME DE REGLARE CU ORIENTARE DUPĂ CÂMP<br />
Princip<strong>al</strong>ii factori care determină structura unui sistem de reglare automată a <strong>vitezei</strong> conceput<br />
pe principiul orientării după câmp sunt:<br />
convertorul static de frecvenţă (CSF), care <strong>al</strong>imentează maşina asincronă;<br />
traductoarele, care impun natura mărimilor de reacţie în bucla de reglaj;<br />
fluxul după care se re<strong>al</strong>izează orientarea după câmp: rotoric, statoric sau din întrefier.<br />
În funcţie de mărimile măsurate, se pot concepe trei variante structur<strong>al</strong>e pentru schemele de<br />
reglare automată a <strong>vitezei</strong> pe principiul orientării după câmp.<br />
*<br />
Ψm<br />
M*<br />
SISTEM DE REGLARE<br />
ORIENTATA<br />
DUPA CAMP<br />
COMPENSATOR<br />
DE FLUX<br />
Ψm<br />
Traductoare<br />
de flux<br />
is<br />
~ RETEA<br />
CSF<br />
MASINA<br />
ASINCRONA<br />
TRIFAZATA<br />
*<br />
Ψm M*<br />
SISTEM DE REGLARE<br />
ORIENTATA<br />
DUPA CAMP<br />
CALCULATOR<br />
DE FLUX<br />
a) b) c)<br />
Fig. IV.16. Posibilităţi de determinare a fluxului la schemele de reglare a <strong>vitezei</strong> bazate pe principiul orientării după<br />
câmp: a) măsurarea directă a fluxului din întrefier; b) c<strong>al</strong>culul fluxului de orientare din curentul şi tensiunea<br />
statorică sau din curentul statoric şi viteza unghiulară a rotorului; c) c<strong>al</strong>culul fluxului de orientare<br />
pe baza modelului de curent <strong>al</strong> maşinii.<br />
Prima metodă utilizează măsurarea directă a câmpului (figura IV.16. a)). În acest caz, mărimea<br />
măsurată este chiar o mărime de reglaj, din care cauză schemele de reglare sunt mai puţin sensibile<br />
la erorile datorate variaţiilor parametrilor maşinii. Pentru a avea acces la flux (câmp), se folosesc<br />
captatori de flux plasaţi convenabil în întrefierul maşinii. Aceştia pot fi:<br />
- cu efect H<strong>al</strong>l – plasaţi sub dinţii statorului; care vor indica v<strong>al</strong>orile loc<strong>al</strong>e <strong>al</strong>e fluxului. Pentru<br />
a obţine fluxul glob<strong>al</strong>, v<strong>al</strong>orile indicate de traductori vor trebui prelucrate ulterior. Fluxul măsurat<br />
va fi perturbat de crestăturile rotorice şi va conţine numeroase armonici;<br />
- înfăşurări suplimentare în stator – care prezintă dezavantajul că la viteze scăzute, rezistenţa<br />
înfăşurării devine predominantă, ceea ce necesită un grad oarecere de compensare. Din această cauză<br />
nu se pot utiliza la viteze foarte scăzute, fiind interzise la acţionări de precizie.<br />
Traductoarele de flux fac să se piardă princip<strong>al</strong>ele avantaje <strong>al</strong>e maşinii <strong>asincrone</strong>: simplitate,<br />
robusteţe, preţ de cost scăzut.<br />
A doua metodă (figura IV.16 b)), se bazează pe determinarea indirectă a câmpului, care este<br />
c<strong>al</strong>culat din curenţii şi tensiunile statorice şi viteze rotorului. Schemele concepute în această varian-<br />
62<br />
ωr<br />
Traductor<br />
de viteza<br />
is<br />
us<br />
~<br />
RETEA<br />
CSF<br />
MASINA<br />
ASINCRONA<br />
TRIFAZATA<br />
*<br />
Ψm M*<br />
SISTEM DE REGLARE<br />
ORIENTATA<br />
DUPA CAMP<br />
CALCULATOR<br />
DE FLUX<br />
ωr<br />
Traductor<br />
de viteza<br />
is<br />
ir<br />
~<br />
RETEA<br />
CSF<br />
MASINA<br />
ASINCRONA<br />
TRIFAZATA<br />
-
tă sunt influenţate de variaţia rezistenţei rotorice şi de saturaţia fierului, dar elimină problemele în<br />
primul rând construct<strong>iv</strong>e legate de măsurarea directă a fluxului.<br />
A treia metodă (figura IV.16 c)), se poate aplica numai maşinilor cu rotorul bobinat, la care<br />
câmpul este c<strong>al</strong>culat din curenţii statorici şi rotorici. Metoda conferă avantajele precedente şi nu este<br />
influenţată de rezistenţa rotorică (numai de saturaţia fierului).<br />
Metodele de reglare bazate pe principiul orientării după câmp pot fi aplicate indiferent de tipul<br />
convertorului static de frecvenţă. Influenţa naturii convertorului se reflectă în structura schemei<br />
de reglare numai în ceea ce pr<strong>iv</strong>eşte c<strong>al</strong>culul mărimilor de comandă. Cele mai simple sunt cele care<br />
utilizează convertoare statice cu circuit intermediar de curent continuu cu caracter de susrsă de curent<br />
(CSI), sau invertoarele PWM cu curent sinusoid<strong>al</strong> reglat. Utilizarea convertoarelor cu caracter<br />
de sursă de tensiune (CSU) re<strong>al</strong>izate cu invertoare cu şase pulsuri sau PWM, va necesita scheme de<br />
reglare mai complicate.<br />
63