F BER OPT K SENSÖRLER VE OPT K J ROSKOP ÖZET
F BER OPT K SENSÖRLER VE OPT K J ROSKOP ÖZET
F BER OPT K SENSÖRLER VE OPT K J ROSKOP ÖZET

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Fİ<strong>BER</strong> <strong>OPT</strong>İK <strong>SENSÖRLER</strong> <strong>VE</strong> <strong>OPT</strong>İK Jİ<strong>ROSKOP</strong><br />
Öğ.Kd.Yzb. Mustafa YAĞIMLI<br />
Elektrik Elektronik Müh. Böl.<br />
Deniz Harp Okulu<br />
myagimli@dho.edu.tr<br />
<strong>ÖZET</strong><br />
Teknolojinin gelişmesiyle ve<br />
ihtiyaçların artmasıyla birlikte<br />
optoelektronik ve fiber optik teknolojisinde<br />
de yeni gelişmeler olmuş ve yeni yeni<br />
uygulama alanları keşfedilmiştir. Önceleri<br />
sadece kayıpsız bilgi taşıma amaçlı<br />
kullanılan fiber optikler, farklı uygulama<br />
alanlarında denenmiş ve pek çok başarılar<br />
elde edilmiştir. Özellikle cisim algılama,<br />
renk algılama gibi alanlarda yapılan verimli<br />
çalışmalar sonucunda fiber optiklerin<br />
yüksek hassasiyetli algılayıcılar olarak<br />
kullanılabileceğini göstermiştir. Yapılan bu<br />
çalışmada fiber optik sensör tipleri,<br />
uygulama alanları, çalışma prensipleri,<br />
avantajları ve dezavantajları, ayrıca özel<br />
bir uygulama alanı olarak ta Fiber Optik<br />
Jiroskop incelenmiştir.<br />
1. GİRİŞ<br />
Güdümlü bir fiber kablo<br />
aracılığıyla bilgi taşıyan iletişim<br />
sistemlerine fiber optik sistemler<br />
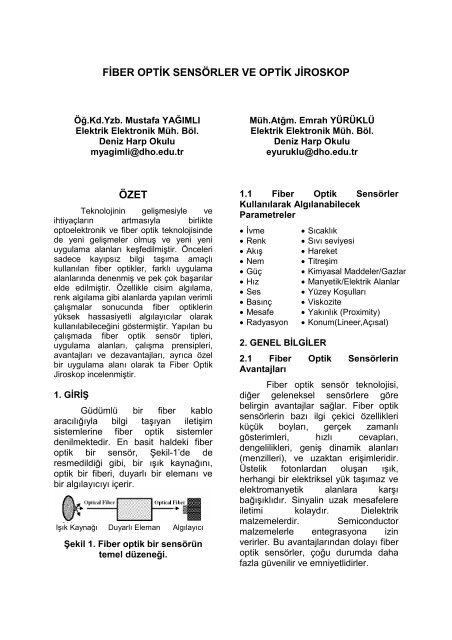
denilmektedir. En basit haldeki fiber<br />
optik bir sensör, Şekil-1’de de<br />
resmedildiği gibi, bir ışık kaynağını,<br />
optik bir fiberi, duyarlı bir elemanı ve<br />
bir algılayıcıyı içerir.<br />
Işık Kaynağı Duyarlı Eleman Algılayıcı<br />
Şekil 1. Fiber optik bir sensörün<br />
temel düzeneği.<br />
Müh.Atğm. Emrah YÜRÜKLÜ<br />
Elektrik Elektronik Müh. Böl.<br />
Deniz Harp Okulu<br />
eyuruklu@dho.edu.tr<br />
1.1 Fiber Optik Sensörler<br />
Kullanılarak Algılanabilecek<br />
Parametreler<br />
• İvme<br />
• Renk<br />
• Akış<br />
• Nem<br />
• Güç<br />
• Hız<br />
• Ses<br />
• Basınç<br />
• Mesafe<br />
• Radyasyon<br />
2. GENEL BİLGİLER<br />
• Sıcaklık<br />
• Sıvı seviyesi<br />
• Hareket<br />
• Titreşim<br />
• Kimyasal Maddeler/Gazlar<br />
• Manyetik/Elektrik Alanlar<br />
• Yüzey Koşulları<br />
• Viskozite<br />
• Yakınlık (Proximity)<br />
• Konum(Lineer,Açısal)<br />
2.1 Fiber Optik Sensörlerin<br />
Avantajları<br />
Fiber optik sensör teknolojisi,<br />
diğer geleneksel sensörlere göre<br />
belirgin avantajlar sağlar. Fiber optik<br />
sensörlerin bazı ilgi çekici özellikleri<br />
küçük boyları, gerçek zamanlı<br />
gösterimleri, hızlı cevapları,<br />
dengelilikleri, geniş dinamik alanları<br />
(menzilleri), ve uzaktan erişimleridir.<br />
Üstelik fotonlardan oluşan ışık,<br />
herhangi bir elektriksel yük taşımaz ve<br />
elektromanyetik alanlara karşı<br />
bağışıklıdır. Sinyalin uzak mesafelere<br />
iletimi kolaydır. Dielektrik<br />
malzemelerdir. Semiconductor<br />
malzemelerle entegrasyona izin<br />
verirler. Bu avantajlarından dolayı fiber<br />
optik sensörler, çoğu durumda daha<br />
fazla güvenilir ve emniyetlidirler.
2.2 Fiber Optik Sensörlerin<br />
Dezavantajları<br />
Çalışmasının çevresel<br />
parametrelere bağımlı olması fiber<br />
optik sensörün en önemli<br />
dezavantajlarından biridir. Duyarlı<br />
eleman üzerinden geçen ışığın genlik,<br />
frekans, faz ve polarizasyonu gibi<br />
fiziksel özellikleri sensörün duyarlı<br />
kısmını saran çevredeki<br />
değişikliklerden etkilenebilir.<br />
2.3 Fiber Optik Sensör Tipleri<br />
Fiber optik sensörler yapılarına<br />
göre intrinsic ve extrinsic sensörler<br />
şeklinde iki ayrı gruba ayrılırlar;<br />
Intrinsic sensörler; Fiberin<br />
kendisi algılayıcı olarak davranır ve<br />
yayılan ışık asla fiberi terk etmez.<br />
Extrinsic sensörler; Eğer fiber<br />
sadece ışığın iletilmesinde ve sistemle<br />
bağlantısında rol alıyorsa yani duyarlı<br />
eleman fiberin tümleşik bir parçası<br />
değilse bu şekilde adlandırılır.<br />
Şekil 2. (a)Intrinsic sensör,<br />
(b)Extrinsic sensör.<br />
Extrinsic sensörler sıcaklık,<br />
basınç, sıvı seviyesi ve akış kontrol<br />
işlemleri için kullanılan lineer ve açısal<br />
pozisyon sensörlerini kapsarlar.<br />
Intrinsic sensörler rotasyon, ivme,<br />
strain, basınç ve titreşim gibi<br />
büyüklüklerin ölçümlerinde kullanılırlar.<br />
Intrinsic sensörler Extrinsic sensörlere<br />
göre daha hassastırlar. Extrinsic<br />
sensörlerin ise kullanımları daha<br />
kolaydır ve daha kolay çoğullama<br />
işlemi gerçekleştirilir.<br />
Farklı frekanslarda çalışan<br />
birçok intrinsic veya extrinsic sensör,<br />
Şekil 3.a,b ve Şekil 4.a’da resmedildiği<br />
gibi seri veya paralel kombinasyonlar<br />
halinde bağlanabilir. Tek bir fiber<br />
genişbandlı bir ışığı yollamada ve seriyayılmış<br />
fiber optik sensörde<br />
dalgaboyu-bölmeli çoğullamayı<br />
yapmada kullanılır. Bu düzeni<br />
kullanarak birçok parametreyi<br />
eşzamanlı olarak algılayabiliriz.<br />
Geniş band<br />
Işık Kaynağı Sensör Algılayıcı<br />
(a) intrinsic sensörlerin seri dağıtımı<br />
Geniş band<br />
Işık Kaynağı Sensör Algılayıcı<br />
(b) extrinsic sensörlerin seri dağıtımı<br />
Şekil 3.Sensörlerin seri dağıtımı<br />
Birçok fiberle bağlantılı fiber<br />
optik sensörler, Aşağıda (Şekil-4b)<br />
gösterildiği gibi uzaktan basıncı,<br />
sıcaklığı, nemi, v.b. büyüklükleri<br />
görüntülemek için geniş bir alana<br />
dağıtılabilir.<br />
Şekil 4.(a) Sensörlerin paralel<br />
dağılımı, (b) Geniş bir alana<br />
yerleştirilmiş yayılmış fiberoptik<br />
sensörler ve uzaktan bağlanmış bir<br />
ışık kaynağı ve bir algılayıcı.
Şekil 5. Extrinsic ve Intrinsic<br />
Sensörlerle Algılanan Parametreler<br />
3. Fİ<strong>BER</strong> <strong>OPT</strong>İK Jİ<strong>ROSKOP</strong> (FOG)<br />
Dönmeyi algılayan sensörlere<br />
jiroskop denir. Fiber optik jiroskop<br />
Sagnac etkisinin temel alır. Kangal,<br />
kangal düzlemine dik bir eksen<br />
etrafında döndüğünde, fiber kangalı<br />
etrafında zıt yönlerde hareket eden iki<br />
ışık demeti arasında meydana gelen<br />
faz kayması Sagnac etkisi olarak<br />
bilinir.<br />
FOG açısal dönmeyi ölçmek<br />
için mükemmel bir cihaz olmasına<br />
rağmen, çeşitli etkilerden dolayı hatalar<br />
vermektedir. FOG' da en önemli hata<br />
kaynağı, FOG' u oluşturan materyallerin<br />
ısısal bağımlılık göstermesidir. Bu<br />
yüzden, FOG’larda ısıdan kaynaklanan<br />
hatalı ölçme oranının belirlenip, FOG<br />
çıktısının modifiye edilmesi<br />
gerekmektedir.<br />
Beklenen faz kaymasını<br />
hesaplamak için R yarıçaplı fiberin<br />
etrafında tek bir dairesel sarıma sahip<br />
olduğumuzu varsayalım. Aynı<br />
zamanda her iki demetin etkin olarak<br />
bir vakumda hareket etmek zorunda<br />
olduklarını varsayalım. Eğer hiçbir<br />
dönme yoksa, bu durumda her iki<br />
demet başlangıç noktalarına t=2R/c<br />
olmak üzere bir t zamanında<br />
döneceklerdir. Bununla beraber, halka<br />
saat ibreleri yönünde Ω rad s -1 hızı ile<br />
dönüyorsa bu durumda saat ibreleri<br />
tersi yönündeki demet, başlangıç<br />
noktasında etkin demet hızı c+R.Ω ve<br />
alınan t ' zamanı;<br />
t' = ( 2π<br />
R)<br />
/( c + RΩ)<br />
(3.1)<br />
olacağında erken varacaktır. Benzer<br />
tartışma saat ibresi yönündeki demet<br />
için t '' geçiş zamanını verecektir;<br />
t'' = ( 2π<br />
R)<br />
/( c − RΩ)<br />
(3.2)<br />
Birçok fiber optik Sagnac<br />
girişimölçeri N, sayıda halkanın<br />
dairesel formda bir araya getirilmesi ile<br />
oluşur. Bu durumda faz farkı için<br />
aşağıdaki formül elde edilir;<br />
4LR<br />
8πAN<br />
∆δ<br />
= Ω = Ω<br />
λc<br />
λc<br />
(3.3)<br />
Burada L, kangalın uzunluğu<br />
olup(L=2πRN), A ise kangalın<br />
alanıdır(A=πR 2 ).<br />
Şekil 6. Fiber optik jiroskop<br />
Şekil 6’da fiber optik jiroskopa<br />
ait fiber kangalı, Şekil 7’de ise Sagnac<br />
efektine ait açıklayıcı bilgi ve şekiller<br />
bulunmaktadır.<br />
Şekil 7. Sagnac efekti
4. SONUÇ<br />
Fiber optik teknolojisi bulunduğu<br />
yıllardan beri büyük gelişmeler<br />
göstermiştir. Bu gelişme sürecinde<br />
birçok farklı alanda denenmiş ve<br />
başarılar elde edilmiştir. Günümüzde<br />
fiber optikler ve optoelektronik devreler<br />
haberleşmeden kontrol sistemlerine<br />
kadar pek çok alanda kullanılmaktadır.<br />
Fiber optik jiroskop, sagnac efektinden<br />
yararlanılarak dönme hareketini yüksek<br />
hassasiyetle algılaması ile jiroskoplar<br />
neredeyse tamamen fiber optik<br />
jiroskoplara dönüşmüşlerdir. Gemi,<br />
uçak, roket vb. navigasyon<br />
sistemlerinde, robot kolları gibi dönme<br />
hareketinin algılanmasının önemli<br />
olduğu yerlerde fiber optik jiroskop<br />
kullanılmaktadır. Günden güne<br />
teknolojinin gelişmesi ile de fiber optik<br />
jiroskopların boyutları da küçültülmüş,<br />
hassasiyetleri ise çok daha yüksek<br />
boyutlara getirilmiştir.<br />
KAYNAKLAR<br />
• Lefevre, H.C., “The Fiber-Optic<br />
Gyroscope”, Artech House<br />
Optoelectronics Library, 1993.<br />
• Smith, W.J., “Modern Optical<br />
Engineering”, McGraw-Hill,<br />
2000.<br />
• Wright, E.M., Meystre, P., Firth,<br />
W.J., Kaplan, A.E., “Theory of<br />
the nonlinear Sagnac effect in a<br />
fiber-optic gyroscope”, Phys<br />
Rev. A., 1985 Nov;32(5):2857-<br />
2863.<br />
• www.usd.edu/~schieber/iea200<br />
0/autogyro<br />
• http://www.nrl.navy.mil/techtrans<br />
fer/fs.php?fs_id=OP03