Micromaster Bico Fonksiyon TR - Teknika Otomasyon
Micromaster Bico Fonksiyon TR - Teknika Otomasyon
Micromaster Bico Fonksiyon TR - Teknika Otomasyon
- No tags were found...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
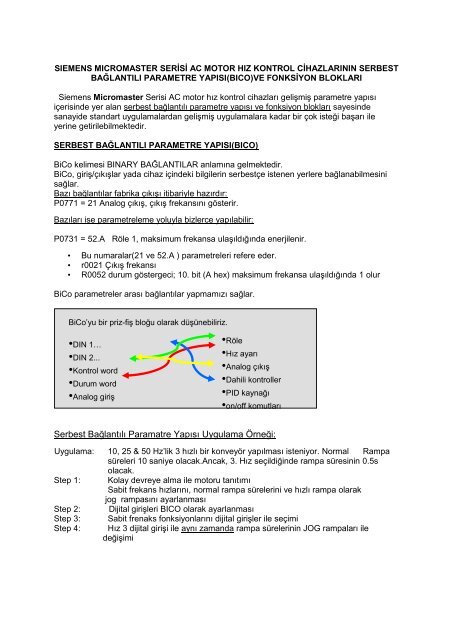
SIEMENS MICROMASTER SERĠSĠ AC MOTOR HIZ KON<strong>TR</strong>OL CĠHAZLARININ SERBESTBAĞLANTILI PARAME<strong>TR</strong>E YAPISI(BICO)VE FONKSĠYON BLOKLARISiemens <strong>Micromaster</strong> Serisi AC motor hız kontrol cihazları gelişmiş parametre yapısıiçerisinde yer alan serbest bağlantılı parametre yapısı ve fonksiyon blokları sayesindesanayide standart uygulamalardan gelişmiş uygulamalara kadar bir çok isteği başarı ileyerine getirilebilmektedir.SERBEST BAĞLANTILI PARAME<strong>TR</strong>E YAPISI(BICO)BiCo kelimesi BINARY BAĞLANTILAR anlamına gelmektedir.BiCo, giriş/çıkışlar yada cihaz içindeki bilgilerin serbestçe istenen yerlere bağlanabilmesinisağlar.Bazı bağlantılar fabrika çıkışı itibariyle hazırdır:P0771 = 21 Analog çıkış, çıkış frekansını gösterir.Bazıları ise parametreleme yoluyla bizlerce yapılabilir:P0731 = 52.A Röle 1, maksimum frekansa ulaşıldığında enerjilenir.• Bu numaralar(21 ve 52.A ) parametreleri refere eder.• r0021 Çıkış frekansı• R0052 durum göstergeci; 10. bit (A hex) maksimum frekansa ulaşıldığında 1 olurBiCo parametreler arası bağlantılar yapmamızı sağlar.Serbest Bağlantılı Paramatre Yapısı Uygulama Örneği:Uygulama: 10, 25 & 50 Hz’lik 3 hızlı bir konveyör yapılması isteniyor. Normal Rampasüreleri 10 saniye olacak.Ancak, 3. Hız seçildiğinde rampa süresinin 0.5solacak.Step 1: Kolay devreye alma ile motoru tanıtımıSabit frekans hızlarını, normal rampa sürelerini ve hızlı rampa olarakjog rampasını ayarlanmasıStep 2: Dijital girişleri BICO olarak ayarlanmasıStep 3:Step 4:BiCo’yu bir priz-fiş bloğu olarak düşünebiliriz.•DIN 1…•DIN 2...•Kontrol word•Durum word•Analog giriş•...•Röle•Hız ayarı•Analog çıkış•Dahili kontroller•PID kaynağı•on/off komutları•……...Sabit frenaks fonksiyonlarını dijital girişler ile seçimiHız 3 dijital girişi ile aynı zamanda rampa sürelerinin JOG rampaları iledeğişimi
5 DIN 16 DIN 27 DIN 38 24V722.0722.1722.2MM420P1020 FF1 kaynağıP1021 FF2 kaynağıP1022 FF3 kaynağıP1001 FF1 = 10HzP1002 FF2 = 25HzP1003 FF3 = 50HzP1016 reaksiyon (FF1 + start)P1017 reaksiyon (FF2 + start)P1018 reaksiyon (FF3 + start)FONKSĠYON BLOKLARISTART!P1124 = 722 .2Alternatif JOG rampasınıkullan<strong>Micromaster</strong> hız kontrol cihazları aşağıda belirtilen fonksiyon bloklarına sahiptir.Bu fonksiyonbloklarının giriş ve çıkış değişkenleri serbest bağlantılı parametrelere atanarak istenenfonksiyon bloğu aktif hale getirilebilir.• 3 adet AND kapısı• 3 adet OR kapısı• 3 adet XOR kapısı• 3 adet NOT kapısı• 2 adet D tip FlipFlop• 3 adet RS tip FlipFlop• 4 adet zaman sayacı• 2 Toplama, 2 Çıkarma, 2 Çarpma, 2 Bölme, 2 KarşılaştırıcıBütün fonksiyon blokları her 132ms’de güncellenerek tekrar hesaplanır.Örnek AND kapısı:
Örnek Zaman Sayacı:<strong>Fonksiyon</strong> Blokları Uygulama Örneği:Sürücünün proses gereği maximum frekans aşıldığında belli bir zaman gecikmesi ile hataverip stop konumuna geçmesi isteniyor.Bunun için <strong>Micromaster</strong> sürücüde bir adet NOT1 kapısı ve bir adet Timer1 kullanmak yeterliolacaktır.Harici hata kaynağı güvenlik gereği(kablo kopması vs..) normal çalışmada“1”(kapalı kontak) konumunda hata durmunda “0”(açık kontak) konumunda olduğu için NOTkapısı kullanılarak maximum frekansın altında çalışmada sistemden gelen “0” bilgisi NOTkapısı ile hata kaynağına “1”, maximum frekansın üstünde sistemden gelen “1” bilgisi NOTkapısı ile hata kaynağına “0” olarak gönderilerek uygun çalışma sağlanır.NOT kapısıgirişi:P2828:56.bNOT1 çıkışı: P2829r56.bmax.frekansaşıldıNOT1P2800=1 (fonksiyon bloklarıaktif)P2801.9 = 1 ( NOT1 aktif)P2802.0 =1 (TIMER 1 aktif)Timer1 girişiP2849 = 2829TIMER 1Timer1 ModuP2851 = 0 (delay on)P2850 = 1 (gecikmezamanı,sn)P2106: Hatakaynağınabağlantı