

sensör verisi birleÅtirme teknikleri ve hedef ... - Hava Harp Okulu
sensör verisi birleÅtirme teknikleri ve hedef ... - Hava Harp Okulu
sensör verisi birleÅtirme teknikleri ve hedef ... - Hava Harp Okulu

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
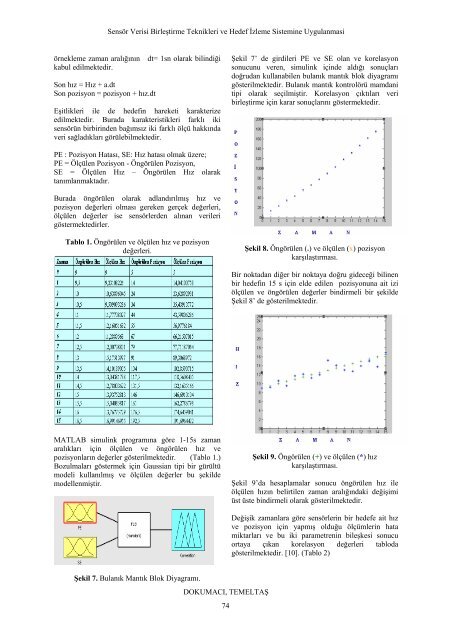
Sensör Verisi Birleştirme Teknikleri <strong>ve</strong> Hedef İzleme Sistemine Uygulanmasiörnekleme zaman aralığının dt= 1sn olarak bilindiğikabul edilmektedir.Son hız = Hız + a.dtSon pozisyon = pozisyon + hız.dtEşitlikleri ile de <strong>hedef</strong>in hareketi karakterizeedilmektedir. Burada karakteristikleri farklı ikisensörün birbirinden bağımsız iki farklı ölçü hakkında<strong>ve</strong>ri sağladıkları görülebilmektedir.Şekil 7’ de girdileri PE <strong>ve</strong> SE olan <strong>ve</strong> korelasyonsonucunu <strong>ve</strong>ren, simulink içinde aldığı sonuçlarıdoğrudan kullanabilen bulanık mantık blok diyagramıgösterilmektedir. Bulanık mantık kontrolörü mamdanitipi olarak seçilmiştir. Korelasyon çıktıları <strong>ve</strong>ribirleştirme için karar sonuçlarını göstermektedir.PE : Pozisyon Hatası, SE: Hız hatası olmak üzere;PE = Ölçülen Pozisyon - Öngörülen Pozisyon,SE = Ölçülen Hız – Öngörülen Hız olaraktanımlanmaktadır.Burada öngörülen olarak adlandırılmış hız <strong>ve</strong>pozisyon değerleri olması gereken gerçek değerleri,ölçülen değerler ise sensörlerden alınan <strong>ve</strong>rilerigöstermektedirler.Tablo 1. Öngörülen <strong>ve</strong> ölçülen hız <strong>ve</strong> pozisyondeğerleri.Şekil 8. Öngörülen (.) <strong>ve</strong> ölçülen (x) pozisyonkarşılaştırması.Bir noktadan diğer bir noktaya doğru gideceği bilinenbir <strong>hedef</strong>in 15 s için elde edilen pozisyonuna ait iziölçülen <strong>ve</strong> öngörülen değerler bindirmeli bir şekildeŞekil 8’ de gösterilmektedir.MATLAB simulink programına göre 1-15s zamanaralıkları için ölçülen <strong>ve</strong> öngörülen hız <strong>ve</strong>pozisyonların değerler gösterilmektedir. (Tablo 1.)Bozulmaları göstermek için Gaussian tipi bir gürültümodeli kullanılmış <strong>ve</strong> ölçülen değerler bu şekildemodellenmiştir.Şekil 9. Öngörülen (+) <strong>ve</strong> ölçülen (*) hızkarşılaştırması.Şekil 9’da hesaplamalar sonucu öngörülen hız ileölçülen hızın belirtilen zaman aralığındaki değişimiüst üste bindirmeli olarak gösterilmektedir.Değişik zamanlara göre sensörlerin bir <strong>hedef</strong>e ait hız<strong>ve</strong> pozisyon için yapmış olduğu ölçümlerin hatamiktarları <strong>ve</strong> bu iki parametrenin bileşkesi sonucuortaya çıkan korelasyon değerleri tablodagösterilmektedir. [10]. (Tablo 2)Şekil 7. Bulanık Mantık Blok Diyagramı.DOKUMACI, TEMELTAŞ74













