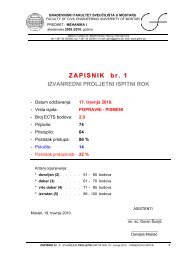
PRINCIP VIRTUALNIH RADOVA
PRINCIP VIRTUALNIH RADOVA
PRINCIP VIRTUALNIH RADOVA

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
ELEMENTI ANALITIČKE STATIKE<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
1. OBILJEŽJE METODE <strong>VIRTUALNIH</strong> POMAKA<br />
Dosad smo pri rješavanju statičkih zadataka koristili Poinsotovu<br />
metodu projekcija zasnovanu na principu paralelograma sila.<br />
Ta metoda kod složenijih sustava, na primjer od n tijela gdje u<br />
općem slučaju imamo 6 jednadžbi po svakom tijelu tj ukupno 6n<br />
jednadžbi, nije primjerena.<br />
Radi toga se koristi metoda virtualnih pomaka koja se temelji<br />
na principu virtualnih radova.<br />
Glavna joj je odlika da u slučaju idealnih veza daje jednadžbu<br />
koja ne sadrži reakcije veza, nego samo efektivne sile.<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
1
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
2. POJAM VIRTUALNOG POMAKA<br />
I VIRTUALNOG RADA<br />
Virtualnim pomakom δs nazivamo zamišljeni, veoma mali i<br />
od vremena nezavisni, dakle, čisto geometrijski pomak sustava,<br />
koji njegove veze dopuštaju.<br />
Pomak mora biti malen, da sile ne bi mijenjale svoj pravac.<br />
Koliko stupnjeva slobode ima zadani sustav, toliko je virtualnih<br />
pomaka moguće i potrebno, da se izraze pomaci sviju točaka<br />
sustava.<br />
Virtualnim radom sile, koja djeluje na kruto tijelo naziva se rad<br />
te sile pri virtualnom pomaku tijela.<br />
Djeluje li na tijelo (ili na složeni sustav) više sila, onda je virtualni<br />
rad tog sustava sila jednak sumi virtualnih radova svih sila<br />
sustava.<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
3. VIRTUALNI RAD SILA, KOJE DJELUJU<br />
NA MATERIJALNU TOČKU<br />
Slučaj slobodne materijalne točke<br />
Virtualni rad sila, koje djeluju<br />
na promatranu točku pri<br />
njezinom virtualnom pomaku<br />
δs, može se izraziti kao:<br />
→ →<br />
⎛ ⎞<br />
R δs cos ⎜R,<br />
δs⎟<br />
= Rxδx<br />
+ Ryδy<br />
+ Rzδz<br />
⎝ ⎠<br />
Ako je zadani sustav sila u<br />
ravnoteži bit će:<br />
Rx = 0, Ry<br />
= 0, Rz<br />
= 0.<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
2
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Ako na točku djeluju sile tako,<br />
da je njihov rad pri svakom<br />
virtualnom pomaku jednak nuli,<br />
onda je taj sustav sila u<br />
ravnoteži.<br />
Analitički to možemo izraziti kao:<br />
→ →<br />
⎛ ⎞<br />
R δs cos ⎜R,<br />
δs⎟<br />
= 0<br />
⎝ ⎠<br />
odnosno u obliku poznatog<br />
tročlanog izraza:<br />
Rx δx<br />
+ Ryδy<br />
+ Rzδz<br />
= 0<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Ako uzmemo, na primjer da je:<br />
δx<br />
= δy<br />
= 0, a δz<br />
≠ 0<br />
onda je očigledno da mora biti:<br />
R z<br />
= 0<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
ZA SLOBODNU MATERIJALNU<br />
TOČKU<br />
Sustav sila, koje djeluju na<br />
slobodnu materijalnu točku, bit<br />
će u ravnoteži samo u slučaju<br />
ako je algebarska suma radova<br />
svih sila pri svakom virtualnom<br />
pomaku jednaka nuli.<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
3
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Slučaj neslobodne materijalne točke<br />
Materijalna točka A vezana je<br />
za plohu F(x, y, z) = 0<br />
uprostoru<br />
prostoru.<br />
Jednadžba ravnoteže u<br />
vektorskom obliku glasi:<br />
n<br />
∑<br />
i=<br />
1<br />
→<br />
Pi N =<br />
+ →<br />
Ako zamislimo da je točka A<br />
dobila beskonačno mali pomak<br />
δs na površini zadane plohe, i<br />
ako gornju jednadžbu<br />
pomnožimo skalarno s δs:<br />
n<br />
∑<br />
i=<br />
1<br />
→<br />
→<br />
→<br />
→<br />
0<br />
Pi ⋅ δs<br />
+ N ⋅ δs<br />
=<br />
0<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Budući da je:<br />
→<br />
→<br />
N ⊥ δs<br />
n<br />
∑<br />
i=<br />
1<br />
→<br />
→<br />
Pi ⋅ δs<br />
=<br />
0<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
ZA NESLOBODNU<br />
MATERIJALNU TOČKU<br />
Da bi materijalna točka, koja je<br />
podvrgnuta vanjskim vezama<br />
bez trenja, bila u ravnoteži,<br />
nužno je i dovoljno, da za svaki<br />
virtualni pomak koji veze<br />
dopuštaju, suma virtualnih<br />
radova zadanih sila bude<br />
jednaka nuli.<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
4
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
4. VIRTUALNI RAD SILA, KOJE DJELUJU<br />
NA KRUTO TIJELO<br />
Na materijalnu točku m i djeluju tri sile:<br />
a) zadana sila P i ,<br />
b) vanjska reakcija veza N i i<br />
c) unutarnja reakcija N i *.<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Jednadžba ravnoteže točke m i :<br />
→<br />
→<br />
→<br />
*<br />
Pi + Ni<br />
+ Ni<br />
=<br />
Ako zamislimo da smo tijelu dali virtualni pomak koji vanjske<br />
veze dopuštaju:<br />
→ → → → → →<br />
*<br />
P ⋅ δs<br />
+ N ⋅ δs<br />
+ N ⋅ δs<br />
0<br />
0<br />
i i i i i i<br />
=<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
5
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Sumiranjem za sve točke krutog tijela dobivamo:<br />
n<br />
∑<br />
i=<br />
1<br />
*<br />
Pi ⋅ δsi<br />
+ N ⋅ δs<br />
+ N ⋅ δs<br />
= 0<br />
S obzirom da su drugi i treći član jednaki nuli:<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
→<br />
→<br />
n<br />
∑<br />
i=<br />
1<br />
→<br />
i<br />
→<br />
i<br />
n<br />
∑<br />
i=<br />
1<br />
→<br />
i<br />
→<br />
i<br />
n<br />
∑<br />
i=<br />
1<br />
→<br />
→<br />
Pi ⋅ δsi<br />
= 0<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong> ZA KRUTO TIJELO<br />
Da bi kruto tijelo, koje je podvrgnuto vanjskim vezama bez<br />
trenja, bilo u ravnoteži, nužno je i dovoljno, da za svaki virtualni<br />
pomak tijela, koji veze dopuštaju, suma virtualnih radova zadanih<br />
sila bude jednaka nuli.<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
6
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
5. VIRTUALNI RAD SILA, KOJE DJELUJU<br />
NA SUSTAV KRUTIH TIJELA<br />
Sumiranjem jednadžbi za sva tri tijela dobivamo:<br />
n<br />
∑<br />
i=<br />
1<br />
Pi ⋅ δsi<br />
+ Ni<br />
⋅ δsi<br />
= 0<br />
S obzirom da je drugi član jednaki nuli:<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
→<br />
→<br />
n<br />
∑<br />
i=<br />
1<br />
→<br />
→<br />
n<br />
∑<br />
i=<br />
1<br />
→<br />
→<br />
Pi ⋅ δsi<br />
= 0<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong> ZA SUSTAV KRUTIH TIJELA<br />
Da bi sustav krutih tijela, koji je podvrgnut vanjskim vezama bez<br />
trenja, bio u ravnoteži, nužno je i dovoljno, da za svaki virtualni<br />
pomak sustava, koji postojeće veze dopuštaju, suma virtualnih<br />
radova zadanih sila bude jednaka nuli.<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
7
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
6. JEDNOSTRANE I DVOSTRANE VEZE<br />
Za veze sustava pretpostavljamo, da su takve da sustav nije<br />
nepomičan.<br />
Iz položaja, koji sustav zauzima u stanju ravnoteže, može se<br />
zbog djelovanja efektivnih sila beskonačno malo pomaknuti,<br />
a da se pri tom postojeće veze ne poremete.<br />
Dvostrana veza - ona veza koja osim proizvoljnog malog<br />
pomaka sustava dopušta i suprotan pomak.<br />
Jednostrana veza - ona veza koja za svaki virtualni pomak<br />
sustava ne dopušta beskonačno mali<br />
suprotno usmjereni pomak.<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
7. VIRTUALNI RAD UNUTARNJIH SILA<br />
→<br />
Sik Ski<br />
=<br />
+ →<br />
0<br />
Zamislimo, da svake dvije materijalne točke sustava djeluju<br />
uzajamno jednakim i suprotnim silama.<br />
Pretpostavimo da su točke m i i m k spojene fiktivnim štapom<br />
u kojem djeluje aksijalna sila S ik = S ki .<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
8
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Pri virtualnom pomaku prirodnog čvrstog tijela točke m i i m k<br />
zauzele bi položaj m i ’ i m k ’.<br />
Označimo s m i ’’ i m k ’’ projekcije tih točaka m i ’ i m k ’ na<br />
spojnicu m i m k .<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Virtualni rad sila S ik i S ki pri tom pomaku bit će:<br />
δA<br />
= S<br />
ik<br />
⋅<br />
m m<br />
i<br />
''<br />
i<br />
−<br />
S<br />
ki<br />
⋅<br />
m<br />
k<br />
m<br />
''<br />
k<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
9
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Označimo li:<br />
m m = s<br />
za nekruta tijela općenito vrijedi:<br />
odnosno:<br />
i<br />
'<br />
i<br />
k<br />
m m<br />
'<br />
k<br />
''<br />
m m<br />
i<br />
''<br />
k<br />
ik<br />
= s<br />
ik<br />
+ δs<br />
ik<br />
' '<br />
= m m ⋅ cos δα<br />
i<br />
k<br />
δα − beskonacno mali kut,<br />
koji zat var aju spojnice<br />
' '<br />
m m i m m .<br />
i<br />
k<br />
i<br />
k<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Ako zanemarimo beskonačno male veličine višeg reda:<br />
m<br />
''<br />
i<br />
m<br />
''<br />
k<br />
= m m<br />
'<br />
i<br />
'<br />
k<br />
= s<br />
ik<br />
+ δs<br />
ik<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
10
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
''<br />
''<br />
Budući da je: δA<br />
= Sik<br />
⋅ ( mi<br />
mi<br />
− mk<br />
mk<br />
)<br />
pri čemu je:<br />
m m − m m<br />
i<br />
''<br />
i<br />
k<br />
''<br />
k<br />
= m m<br />
i<br />
k<br />
− m<br />
za virtualni rad sila S ik i S ki dobivamo izraz:<br />
δA<br />
= − S ik<br />
⋅ δs ik<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
''<br />
i<br />
m<br />
''<br />
k<br />
= −δs<br />
ik<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong> ZA NEKRUTA TIJELA<br />
Tijelo ili sustav tijela je u ravnoteži, ako je pri svakom virtualnom<br />
pomaku suma virtualnih radova vanjskih i unutarnji sila<br />
jednaka nuli.<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
11
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
8. PRIMJENA <strong>PRINCIP</strong>A <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Poluga<br />
Jednadžba virtualnih radova glasi:<br />
∑ δA = Qa ⋅ δϕ − Pb ⋅ δϕ = 0<br />
odakle dobivamo Arhimedov zakon poluge:<br />
P b =<br />
Qa<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Kosina<br />
Horizontalna komponenta pomaka hvatišta sile P:<br />
δp<br />
= δs<br />
⋅ cosα<br />
A pomak hvatišta sile Q u pravcu te sile je:<br />
δq<br />
= − δs<br />
⋅ sinα<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
12
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Jednadžba virtualnih radova u tom slučaju je:<br />
∑ δ<br />
A =<br />
P ⋅<br />
δp<br />
+<br />
Q ⋅<br />
δq<br />
=<br />
0<br />
odnosno,<br />
P ⋅ δs<br />
⋅ cosα − Q ⋅ δs<br />
⋅ sinα<br />
= 0<br />
i odatle,<br />
P = Q ⋅ tgα<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Kolo na vretenu<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
13
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
9. PROŠIRENJE <strong>PRINCIP</strong>A <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Princip virtualnih radova može se primijeniti u njegovom<br />
općem obliku<br />
ΣδA = 0<br />
na proizvoljan sustav materijalnih točaka pod uvjetom, da<br />
suma radova reakcija veza bude jednaka nuli za svaki virtualni<br />
pomak sustava, koji postojeće veze dopuštaju.<br />
Princip virtualnih radova može se primijeniti i na tekućine ako<br />
ako se izaberu takvi pomaci, da volumen tekućine ostane<br />
konstantan.<br />
Princip virtualnih radova može se primijeniti i kad postojeće veze<br />
proizvode sile trenja, pod uvjetom, da te sile trenja ubrojimo u<br />
zadane sile.<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Određivanje reakcija pomoću principa virtualnih radova<br />
Primjer: Horizontalna greda vezana je u A i poduprta u B, a<br />
opterećena silom P.<br />
Pomoću principa virtualnih radova odrediti veličinu<br />
reakcije u B, za proizvoljni položaj sile P, koji je određen<br />
njezinom udaljenošću x od A.<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
14
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Jednadžba virtualnih radova glasi:<br />
i odatle dobivamo<br />
R B<br />
⋅<br />
b<br />
δϕ −<br />
P ⋅ x<br />
δϕ =<br />
0<br />
R B<br />
= P ⋅<br />
x<br />
b<br />
<strong>PRINCIP</strong> <strong>VIRTUALNIH</strong> <strong>RADOVA</strong><br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
ODREĐIVANJE TEŽIŠTA<br />
PROSTORNI SUSTAVI SILA<br />
Predmet: MEHANIKA I<br />
15
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
1. OPĆENITO O TEŽIŠTU<br />
Kod prostornog sustava paralelnih sila, hvatište rezultante takvog<br />
sustava sila ne mijenja svoj položaj u odnosu na tijelo kad se sve<br />
promatrane paralelne sile zaokrenu u svojim hvatištima za isti kut.<br />
Ako takve sile nastaju djelovanjem sile teže, to jest privlačne sile,<br />
kojom Zemlja privlači sva tijela prema središtu, onda se središte<br />
takvog sustava paralelnih sila istog smjera naziva TEŽIŠTEM.<br />
Sila teža ima pravac niti, koje je jedan kraj nepomično učvršćen, č a na drugom je privezano teško tijelo.<br />
Taj se pravac naziva vertikalnim, a ravnina okomita na taj pravac<br />
zove se horizontalna ravnina.<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Za svako tijelo možemo smatrati, da je sastavljeno od materijalnih<br />
točaka ili čestica mase m 1 , …, m i , … m n i da na svaku česticu<br />
djeluje elementarna težina ΔG i , tako da je ukupna težina tijela:<br />
G<br />
=<br />
n<br />
∑<br />
i=<br />
1<br />
Δ<br />
G i<br />
Zamislimo da smo materijalno tijelo volumena<br />
V rastavili na veoma mnogo elementarnih<br />
čestica u obliku malih paralelepipeda volumena<br />
ΔV. Ako je ΔG težina svake takve<br />
čestice onda je:<br />
ΔG<br />
dG<br />
γ = lim =<br />
ΔV→0<br />
ΔV<br />
dV<br />
specifična težina ili težina jedinice<br />
volumena tijela u promatranoj točki tijela.<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
16
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
U općem slučaju, specifična težina zavisi od položaja promatrane<br />
točke, to jest: γ = γ ( x,y,z )<br />
Veličina ρ = γ/g naziva se gustoćom, specifičnom masom ili<br />
masom jedinice volumena tijela u promatranoj točki.<br />
Prema tome je i ρ funkcija (neprekidna ili prekidna) koordinata<br />
točaka tijela.<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Kod homogenog tijela (ako materija tijela ima u svakoj njegovoj<br />
točki ista mehanička svojstva, bit će γ i ρ konstantne veličine.<br />
2<br />
[ γ<br />
] = N [ ] = Ns<br />
3 ρ<br />
4<br />
m<br />
m<br />
Iz definicija γ i ρ dobivamo:<br />
dG = γ dV = gρdV<br />
Smatramo li te elementarne težine za sustav paralelnih sila istog<br />
smjera, njihova rezultanta bit će jednjaka njihovoj sumi, to jest<br />
težini cijelog tijela.<br />
Koordinate hvatišta te rezultante određujemo kao koordinate<br />
središta paralelnih sila prema izrazima:<br />
∑<br />
∑<br />
∑<br />
∑<br />
ΔG x<br />
ΔG y<br />
x0<br />
= , y0<br />
= , z0<br />
=<br />
ΔG<br />
ΔG<br />
∑<br />
∑<br />
ΔGz<br />
.<br />
ΔG<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
17
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Ako su ΔV i ΔG veoma male veličine, bit će ΔG = γ ΔV, odnosno<br />
ako ih smatramo za beskonačno male slijedi da je dG = γ dV,<br />
pa dobivamo:<br />
∑<br />
∑<br />
γdV<br />
⋅ x<br />
,<br />
γdV<br />
y<br />
∑<br />
∑<br />
γdV<br />
⋅ y<br />
,<br />
γdV<br />
x0<br />
=<br />
0<br />
=<br />
0<br />
z<br />
=<br />
∑<br />
∑<br />
γdV<br />
⋅ z<br />
.<br />
γdV<br />
Te relacije izražavaju tražene koordinate težišta tijela.<br />
(I)<br />
Ako sve težine jedinice volumena tijela γ zamijenimo veličinom<br />
gρ, dobit ćemo izraze težišta tijela u obliku:<br />
∑ρ<br />
∑<br />
∑ρ<br />
∑<br />
gdV ⋅ x<br />
gdV ⋅ y<br />
x0<br />
= , y0<br />
= , z0<br />
=<br />
ρgdV<br />
ρgdV<br />
gdje je ΣρdV masa cijelog tijela.<br />
∑ρ<br />
∑<br />
gdV ⋅ z<br />
ρgdV<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Pretpostavimo li, da je tijelo veoma malo, možemo te izraze<br />
kratiti s g, jer je ubrzanje sile teže za sve točke tijela u tom<br />
slučaju jednako, pa dobivamo:<br />
∑<br />
∑<br />
∑<br />
∑<br />
ρdV<br />
⋅ x<br />
ρdV<br />
⋅ y<br />
x0<br />
= , y0<br />
= , z0<br />
=<br />
ρdV<br />
ρdV<br />
∑<br />
∑<br />
ρdV<br />
⋅ z<br />
ρdV<br />
(II)<br />
Ovi izrazi određuju koordinate težišta masa (ili središta inercije)<br />
tijela.<br />
U slučaju homogenih tijela imamo:<br />
x<br />
1<br />
1<br />
1<br />
= ∫ x dV, y0<br />
= ∫ y dV, z0<br />
=<br />
V<br />
V<br />
V<br />
∫<br />
0 V<br />
V<br />
V<br />
zdV<br />
(III)<br />
Ovi izrazi određuju koordinate težišta volumena promatranog<br />
tijela.<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
18
18.5.2011<br />
∫<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
∫<br />
∫<br />
x dV, y dV, z dV - statički momenti s obzirom na<br />
ravnine yz, xz, xy.<br />
Materijalna ploha<br />
∑ γ<br />
∑<br />
' ΔF<br />
⋅ x<br />
x0<br />
= , y0<br />
=<br />
γ'<br />
ΔF<br />
∑ γ<br />
∑<br />
γ’ - težina jedinice površine plohe<br />
Za homogenu plohu:<br />
' ΔF<br />
⋅ y<br />
γ'<br />
ΔF<br />
1<br />
1<br />
x = ∫ x dF, y0<br />
= ∫ y dF<br />
0<br />
F<br />
F<br />
(F)<br />
(F)<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
U općem (prostornom) slučaju:<br />
1<br />
1<br />
1<br />
x = ∫ x dF, y0<br />
= ∫ y dF, z0<br />
= ∫ z dF<br />
0<br />
F<br />
F<br />
F<br />
(F)<br />
(F)<br />
(F)<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
19
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Materijalna linija<br />
∑ γ<br />
∑<br />
∑ γ<br />
∑<br />
'' Δl<br />
⋅ x<br />
'' Δl<br />
⋅ y<br />
x0<br />
= , y0<br />
= , z0<br />
=<br />
γ''<br />
Δl<br />
γ''<br />
Δl<br />
γ’’ - težina jedinice duljine materijalne linije<br />
Za homogenu liniju:<br />
∑ γ<br />
∑<br />
1<br />
1<br />
1<br />
= ∫ dl ⋅ x, y0<br />
= ∫ dl ⋅ y, z = ∫ dl ⋅ z<br />
l<br />
l<br />
l<br />
x0<br />
0<br />
'' Δl<br />
⋅ z<br />
γ''<br />
Δl<br />
Određivanje težišta homogenih tijela, ploha i materijalnih linija ima<br />
čisto geometrijski karakter.<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
2. TEŽIŠTE SIMETRIČNIH LIKOVA<br />
Za ravne figure što imaju jednu os simetrije, dovoljno je odrediti<br />
jednu koordinatu x 0 ili y 0 težišta S.<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
20
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Težište ravne figure s dvije ili više osi simetrije leži u sjecištu<br />
tih osi.<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
3. TEŽIŠTE MATERIJALNIH LINIJA<br />
Težište izlomljenje linije<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
21
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Težište kružnog luka<br />
l = r · 2α - ukupna duljina luka<br />
dl = rdϕ - duljina luka lučnog elementa<br />
U slučaju kružnog luka<br />
polumjera r i središnjeg kuta<br />
2α težište S leži na<br />
raspolovnici kuta, koja je<br />
ujedno os simetrije.<br />
Njegov položaj na toj<br />
simetrali dobivamo pomoću:<br />
x l<br />
x<br />
∑ Δ<br />
0<br />
=<br />
l<br />
x = r cosϕ - da bismo pod integralom dobili jednu promjenjivu<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
x<br />
0<br />
1<br />
=<br />
l<br />
∫<br />
AB<br />
r<br />
=<br />
2α<br />
1<br />
y dl =<br />
2αr<br />
r<br />
r cosϕ ⋅rdϕ =<br />
2α<br />
r<br />
2α<br />
cosϕdϕ =<br />
r<br />
2α<br />
+α<br />
[ sinϕ] = [ sinα − sin( − α)<br />
] = ⋅ 2sinα<br />
−α<br />
+α<br />
∫<br />
−α<br />
+α<br />
∫<br />
−α<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
22
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
x 0<br />
sin<br />
α<br />
= r ⋅<br />
α<br />
U posebnom slučaju, č kad je α = 90 o = π/2 (polukružni l k ž i luk):<br />
2<br />
x 0<br />
= r ⋅ = 0,637 r<br />
π<br />
Za α = π imamo x 0 = 0 (kružnica).<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
4. TEŽIŠTE MATERIJALNIH PLOHA<br />
Trokutna ploha<br />
ODREĐIVANJE TEŽIŠTA<br />
y=<br />
h 2<br />
bh by<br />
F ⋅ y0 = ⋅ y0<br />
= ∫ ⋅ dy<br />
2 h<br />
y=<br />
0<br />
y 0<br />
2<br />
= ⋅h<br />
3<br />
Predmet: MEHANIKA I<br />
23
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Trapezna ploha<br />
F ⋅ z<br />
0<br />
= F1<br />
⋅ z1<br />
+ F2<br />
⋅ z2<br />
F1<br />
⋅ z1<br />
+ F2<br />
=<br />
F<br />
ODREĐIVANJE TEŽIŠTA<br />
⋅ z<br />
2<br />
z0<br />
1 h 1 2 h<br />
b h ⋅ + a h ⋅<br />
= 2 3 2 3<br />
1<br />
h ( a + b)<br />
2<br />
( 2a b)<br />
( a b)<br />
h +<br />
z 0<br />
=<br />
3 +<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
5. TEŽIŠTE SASTAVLJENIH LIKOVA<br />
Sastavljene likove rastavljamo u što manji broj jednostavnih<br />
sastavnih dijelova, , kojih veličinu i položaj težišta možemo lako<br />
naći.<br />
Pri tom, najprije treba ustanoviti, da li zadano tijelo ima ravnine<br />
simetrije ili osi simetrije, jer u tom slučaju svaka simetričnost<br />
smanjuje broj potrebnih koordinata težišta za jedan.<br />
Važan je odabir pogodnog koordinatnog sustava koji se obvezno<br />
ucrtava u skicu zadanog lika.<br />
U slučaju simetričnih likova izabrat ćemo ravninu simetrije ili os<br />
simetrije za jednu koordinatnu ravninu, odnosno koordinatnu os.<br />
Time se postiže da je koordinata težišta, mjerena od takve ravnine<br />
ili osi jednaka nuli.<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
24
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Zadanu plohu rastavljamo na sastavne dijelove:<br />
- polukružni prsten (razlika polukružnih ploha polumjera r 1 i r 2 )<br />
- tri pravokutne plohe i<br />
- jedna trokutna ploha.<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
25
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
1 2 1<br />
2<br />
2 ⎫<br />
F1<br />
= ⋅ π ⋅r1<br />
= ⋅ π ⋅3,5<br />
= 19,24 cm<br />
2 2<br />
⎪<br />
⎬<br />
1<br />
2<br />
1<br />
2<br />
2<br />
F r<br />
2,0<br />
6,28 cm<br />
2<br />
= ⋅ π ⋅<br />
2<br />
= ⋅ π ⋅ =<br />
2 2<br />
⎪ ⎭<br />
2<br />
F3<br />
= 1,5 ⋅5,5<br />
= 8,25 cm ⎫<br />
⎪<br />
2<br />
F4<br />
= 2,0 ⋅3,0<br />
= 6,00 cm ⎬<br />
2 ⎪<br />
F5<br />
= 1,5 ⋅ 4,5 = 6,75 cm<br />
⎭<br />
ODREĐIVANJE TEŽIŠTA<br />
(površine polukružnih ploha)<br />
(površine pravokutnika 3, 4 i 5)<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
1<br />
F = ⋅1,5<br />
⋅3,0<br />
2<br />
6<br />
=<br />
2,25 cm<br />
2<br />
(površina trokuta)<br />
Ukupna površina zadane plohe iznosi:<br />
F = F<br />
=<br />
2<br />
1<br />
− F2<br />
+ F3<br />
+ F4<br />
+ F5<br />
+ F6<br />
36,21cm<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
26
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Koordinatni sustav biramo tako, da se pojavljuju samo pozitivne<br />
apscise x. Pretpostavimo, da se težište zadane figure nalazi u<br />
točki S(x 0 ,y 0 ).<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
Pomoću poznatih izraza za koordinate težišta ravne homogene<br />
polukružne plohe dobivamo:<br />
4<br />
x = r1<br />
− r1<br />
= 0,576 ⋅r1<br />
= 0,576 ⋅ 3,5 = 2,02 cm; y1<br />
3 ⋅ π<br />
1<br />
=<br />
4<br />
2<br />
= r1<br />
− r2<br />
= 3,5 − 0,424 ⋅ 2,0 = 2,65 cm; y = 0.<br />
3 ⋅ π<br />
x<br />
2<br />
0;<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
27
18.5.2011<br />
Preddiplomski studij Građevinarstva - I. godina studija<br />
II. (ljetni) semestar - akademska 2010./2011. godina<br />
S (5,33; 0,54)<br />
Uvrštavanjem zadanih vrijednosti, koje određuju težišta ostalih<br />
sastavnih dijelova, dobivamo:<br />
F1<br />
x1<br />
− F2<br />
x2<br />
+ F3<br />
x3<br />
+ F4<br />
x4<br />
+ F5<br />
x5<br />
+ F6<br />
x<br />
=<br />
F<br />
6<br />
x0 =<br />
F1<br />
y1<br />
− F2<br />
y2<br />
− F3<br />
y3<br />
− F4<br />
y4<br />
+ F5<br />
y5<br />
+ F6<br />
y<br />
=<br />
F<br />
6<br />
y0 =<br />
5,326 cm<br />
0,5385 cm<br />
ODREĐIVANJE TEŽIŠTA<br />
Predmet: MEHANIKA I<br />
28