ZAPAS WODY POD STÄPKÄ â OSIADANIE STATKU - posejdon
ZAPAS WODY POD STÄPKÄ â OSIADANIE STATKU - posejdon
ZAPAS WODY POD STÄPKÄ â OSIADANIE STATKU - posejdon

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Kpt.Ŝ.w. Tomasz Sobieszczański<br />
MANEWROWANIE STATKIEM MORSKIM<br />
Rozdział XVI<br />
<strong>ZAPAS</strong> <strong>WODY</strong> <strong>POD</strong> STĘPKĄ – <strong>OSIADANIE</strong> <strong>STATKU</strong><br />
Jednym z elementów Ŝeglugi jest pływanie na wodach osłoniętych, kanałowych,<br />
rzecznych i innych, gdzie często występuje ograniczenie głębokości, a co za tym<br />
idzie zakłócenie ruchu falowego wytwarzanego przez statek podczas jego ruchu<br />
swobodnego. Powoduje to znaczne trudności w manewrowaniu statkiem i dlatego<br />
musimy zająć się tym tematem dokładniej.<br />
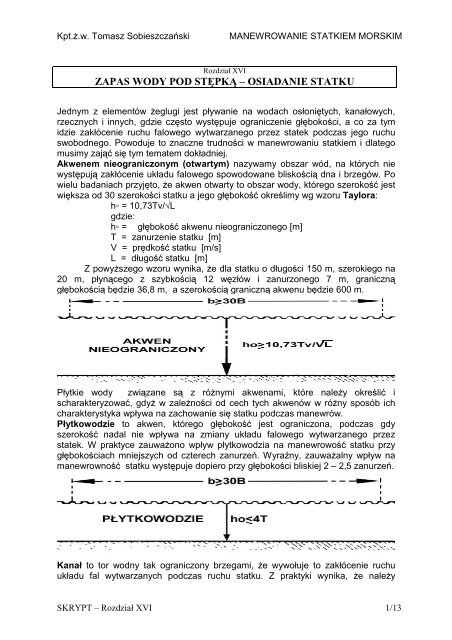
Akwenem nieograniczonym (otwartym) nazywamy obszar wód, na których nie<br />
występują zakłócenie układu falowego spowodowane bliskością dna i brzegów. Po<br />
wielu badaniach przyjęto, Ŝe akwen otwarty to obszar wody, którego szerokość jest<br />
większa od 30 szerokości statku a jego głębokość określimy wg wzoru Taylora:<br />
h◦ = 10,73Tv/√L<br />
gdzie:<br />
h◦ = głębokość akwenu nieograniczonego [m]<br />
T = zanurzenie statku [m]<br />
V = prędkość statku [m/s]<br />
L = długość statku [m]<br />
Z powyŜszego wzoru wynika, Ŝe dla statku o długości 150 m, szerokiego na<br />
20 m, płynącego z szybkością 12 węzłów i zanurzonego 7 m, graniczną<br />
głębokością będzie 36,8 m, a szerokością graniczną akwenu będzie 600 m.<br />
Płytkie wody związane są z róŜnymi akwenami, które naleŜy określić i<br />
scharakteryzować, gdyŜ w zaleŜności od cech tych akwenów w róŜny sposób ich<br />
charakterystyka wpływa na zachowanie się statku podczas manewrów.<br />
Płytkowodzie to akwen, którego głębokość jest ograniczona, podczas gdy<br />
szerokość nadal nie wpływa na zmiany układu falowego wytwarzanego przez<br />
statek. W praktyce zauwaŜono wpływ płytkowodzia na manewrowość statku przy<br />
głębokościach mniejszych od czterech zanurzeń. Wyraźny, zauwaŜalny wpływ na<br />
manewrowność statku występuje dopiero przy głębokości bliskiej 2 – 2,5 zanurzeń.<br />
Kanał to tor wodny tak ograniczony brzegami, Ŝe wywołuje to zakłócenie ruchu<br />
układu fal wytwarzanych podczas ruchu statku. Z praktyki wynika, Ŝe naleŜy<br />
SKRYPT – Rozdział XVI 1/13
Kpt.Ŝ.w. Tomasz Sobieszczański<br />
MANEWROWANIE STATKIEM MORSKIM<br />
powaŜnie brać pod uwagę wpływ szerokości, kiedy jest ona mniejsza od 10<br />
szerokości statku.<br />
Pogłębiony tor wodny stanowi szczególny rodzaj akwenu ograniczonego,<br />
zajmując miejsce, pomiędzy płytkowodziem a kanałem. Najczęściej jest to tor<br />
sztuczny, powstały w wyniku działalności człowieka – pogłębienie płytkiej wody dla<br />
utworzenia Ŝeglownego przejścia dla statków o określonym zanurzeniu<br />
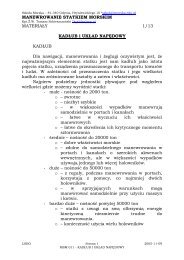
Zapas wody pod stępką jest kryterium, które musimy określić przed podjęciem<br />
decyzji o przejściu określonym torem wodnym. Płytkość akwenu mniejsza od<br />
dwóch zanurzeń odgrywa juŜ znaczną rolę w manewrowności statku, jego<br />
sterowności i moŜliwości wykonania wielu manewrów ograniczonych głębokością i<br />
bliskością róŜnych niebezpieczeństw.<br />
Ze względu na tak duŜe znaczenie odległości dna statku od dna akwenu naleŜy<br />
bardzo staranie wykonać pomiary zanurzenia (wielopunktowo) przed rozpoczęciem<br />
Ŝeglugi na płytkowodziu, czy w kanałach naturalnych lub sztucznych.<br />
DOKŁADNOŚĆ POMIARU GŁĘBOKOŚCI WEDŁUG MIĘDZYNARODOWEJ<br />
ORGANIZACJI HYDROGRAFICZNEJ<br />
Głębokość akwenu<br />
Dokładność pomiaru<br />
[m]<br />
[m]<br />
do 4,0 ±0,10<br />
4,0— 10,0 ±0,15<br />
10,0—20,0 ±0,20<br />
20,0—100,0 ±1%^0<br />
SKRYPT – Rozdział XVI 2/13
Kpt.Ŝ.w. Tomasz Sobieszczański<br />
MANEWROWANIE STATKIEM MORSKIM<br />
Dokładność określenia głębokości przez instytucje hydrograficzne jest ściśle<br />
określona stosownymi przepisami IMO. Przy planowaniu Ŝeglugi przez<br />
płytkowodzie naleŜy w miarę moŜliwości zweryfikować podane na mapie głębokości<br />
i sprawdzić najnowsze doniesienia w tej sprawie, a nawet zasięgnąć informacji w<br />
miejscowym kapitanacie, czy na stacji pilotowej obsługującej dany rejon. Zmiany<br />
rzeczywistych głębokości na wielu akwenach są bardzo dynamiczne, a szczególnie<br />
tam gdzie są silne prądy pływowe, rzeczne, czy inne lokalne, które niosą ze sobą<br />
materiał podłoŜa. Zmiany głębokości w wielu rejonach pływowych są znaczne i<br />
często ograniczają dostępność akwenu tylko do czasu „wysokiej wody” pływowej<br />
[HW].<br />
Istotne znaczenie dla Ŝeglugi maja zmiany poziomu wody wywołane przez:<br />
1 – zjawiska pływowe<br />
2 – pływy wiatrowe (dryfowe)<br />
3 – zmiany ciśnienia<br />
4 – opady<br />
5 – wlewy lokalne<br />
6 – oscylacje akwenu (0,6 – 0,9 m) - nałoŜenie się oscylacji na wysoką falę<br />
pływową moŜe być bardzo niebezpieczne.<br />
Przy planowaniu podróŜy w rejonach płytkich naleŜy wziąć pod uwagę aktualność<br />
danych. RóŜnice w określeniu poziomu wody według tablic i informacji na mapach<br />
do rzeczywistych, mogą być znaczne – 0,6, a nawet 1,8 m !<br />
Tak jak dno jest Ŝywym elementem ekosystemu i zmiany jego musza być wciąŜ<br />
kontrolowane, tak i zanurzenie statku jest zmienne. W kaŜdej podróŜy i w jej<br />
trakcie, zanurzenie statku podlega zmianom, często bardzo znacznym. Przyczyny<br />
zmian zanurzenia statku to przede wszystkim:<br />
1 – wyładunek<br />
2 – załadunek<br />
3 – przesztaunek - przemieszczenie ładunku z jednej ładowni do drugiej<br />
4 – wypompowanie balastów<br />
5 – zabalastowanie<br />
6 – zuŜycie paliwa<br />
7 – pobranie paliwa<br />
8 – zuŜycie wody<br />
9 – pobranie wody<br />
10 – wysychanie ładunku<br />
11 – zwilgotnienie ładunku<br />
12 – utrata ładunku pokładowego<br />
13 – zmiany zasolenia akwenu - zmiana akwenu o wodzie 1,025 na akwen o<br />
wodzie wysłodzonej 1,000, to zmiana zanurzenia o 2,5% ! – czyli<br />
2,5cm na kaŜdy metr zanurzenia.<br />
14 – odkształcenie kadłuba (po kolizji, czy silnym sztormie)<br />
15 – ugięcie – zwiększenie zanurzenia na śródokręciu<br />
16 – wygięcie – zwiększenie zanurzenia na dziobie i rufie - wielkości ugięć,<br />
czy wygięć bywają dość znaczne: 10-30cm.<br />
17 – przechył statku<br />
18 – przesunięcie niezamierzone ładunku<br />
19 – niewłaściwe zabalastowanie L-P<br />
20 – osiadanie statku w ruchu<br />
SKRYPT – Rozdział XVI 3/13
Kpt.Ŝ.w. Tomasz Sobieszczański<br />
MANEWROWANIE STATKIEM MORSKIM<br />
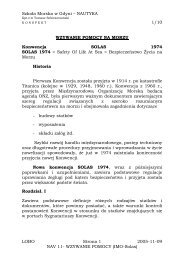
Falotwórczość statku w ruchu, kiedy fala dziobowa i rufowa są wyŜsze a woda<br />
wzdłuŜ środkowej części kadłuba obniŜa się, powoduje opuszczenie się statku<br />
względem dna. Wynika to z tego Ŝe, wypór dziobowej i rufowej części kadłuba jest<br />
zdecydowanie mniejszy niŜ na śródokręciu. Wiele czynników, a przede wszystkim<br />
niejednorodność kształtu kadłuba, powoduje to, Ŝe obniŜenie całego statku nie jest<br />
równoległe i dlatego teŜ następuje przy tej okazji przegłębienie.<br />
Osiadanie statku – całkowite zmniejszenie zapasu wody pod stępką, występujące<br />
w czasie ruchu statku do przodu, wywołane obniŜeniem się zwierciadła wody w<br />
pobliŜu burt statku łącznie z powstającymi przy tym zmianami przegłębienia.<br />
Zapas wody pod stępką wyrazić moŜemy prostym wzorem:<br />
A = h˚ - T<br />
Gdzie:<br />
A – zapas wody pod stępką [m]<br />
h˚- głębokość akwenu [m]<br />
T – zanurzenie statku [m]<br />
JeŜeli uwzględnimy osiadanie statku „Z” to wówczas zapas wody pod stępką będzie<br />
miał postać:<br />
A = h˚ - (T+Z)<br />
Z badań i doświadczeń wynika, ze na płytkowodziu całkowite opory statku<br />
wzrastają wielokrotnie, nawet do 4-7 x. Na płytkowodziu teŜ występują zjawiska,<br />
których nie obserwujemy na akwenach otwartych. Dotyczy to głównie szybkości na<br />
którym oddziałuje fala wytworzona na płytkim, czy w inny sposób ograniczonym,<br />
akwenie.<br />
SKRYPT – Rozdział XVI 4/13
Kpt.Ŝ.w. Tomasz Sobieszczański<br />
MANEWROWANIE STATKIEM MORSKIM<br />
Prędkość krytyczna - prędkość statku równa maksymalnej prędkości fali na<br />
akwenie ograniczonym.<br />
Prędkość podkrytyczna – zakres prędkości mniejszych od krytycznej<br />
Prędkość osiągalna – największa prędkość jaką statek moŜe osiągnąć w kanale z<br />
uwagi na ograniczoną moc swojego napędu głównego.<br />
Prędkość nadkrytyczna – zakres prędkości większych od krytycznej równej<br />
szybkości fali – moŜliwa do osiągnięcia przez statki i okręty z duŜym zapasem<br />
mocy do osiągnięcia szybkości krytycznej (głównie okręty wojenne).<br />
Wielkość osiadania statku jest bardzo trudna do jednoznacznego określenia.<br />
Przeprowadzono bardzo wiele badań i teoretycznych rozwaŜań, z których<br />
wyciągnięto wiele wniosków, ale najbliŜsze rzeczywistych wartości były wyniki<br />
doświadczeń na modelach i badania doświadczalne w naturalnych warunkach<br />
zobrazowane graficznie. Najbardziej popularne wykresy to dane modelowe według<br />
metod Shijfa i Sogreah’a.<br />
S = F¤/F<br />
Gdzie: S = współczynnik prześwitu całkowitego<br />
F¤ = pole powierzchni owręŜa pozostającego pod wodą [m˛]<br />
F = pole przekroju poprzecznego powierzchni akwenu [m˛]<br />
SKRYPT – Rozdział XVI 5/13
Kpt.Ŝ.w. Tomasz Sobieszczański<br />
MANEWROWANIE STATKIEM MORSKIM<br />
Metodę Sogreah’a stosujemy, gdy S≤0,08. Metoda ta wymaga<br />
zastosowania specjalnych trzech wykresów i jest opracowana na podstawie badań<br />
modelowych dla obliczeń osiadania statku w kanałach.<br />
SKRYPT – Rozdział XVI 6/13
Kpt.Ŝ.w. Tomasz Sobieszczański<br />
MANEWROWANIE STATKIEM MORSKIM<br />
Metodę Schijfa stosujemy, gdy S≥0,08, a została ona opracowana dla<br />
prędkości podkrytycznych i wymaga zastosowania tylko jednego wykresu.<br />
F = v/√gh◦<br />
Gdzie:<br />
F – argument do wykresu<br />
V – prędkość statku [m/s]g – przyspieszenie ziemskie [m/s]<br />
h◦ - głębokość akwenu [m]<br />
Z = Nhş<br />
Gdzie:<br />
Z – osiadanie statku<br />
N – współczynnik z wykresu, który jest stosunkiem osiadania do<br />
głębokości akwenu i stąd mamy zaleŜność, z której moŜemy określić<br />
osiadanie „Z”.<br />
Znajomość wielkości osiadania jest niezwykle waŜna, szczególnie wówczas, kiedy<br />
zapas wody pod stępką jest niewielki – bliski osiadaniu. Nabiera jeszcze większej<br />
wagi jeśli mamy doczynienia z bardzo duŜym statkiem i wielkościami osiadania<br />
liczonymi w metrach.<br />
PoniewaŜ prędkość Ŝeglugi w kanałach i na płytkowodziu jest przewaŜnie<br />
ograniczona miejscowymi przepisami i jest znacznie niŜsza od krytycznej moŜna<br />
było opracować uproszczone metody określania osiadania statku do których<br />
naleŜą:<br />
SKRYPT – Rozdział XVI 7/13
Kpt.Ŝ.w. Tomasz Sobieszczański<br />
MANEWROWANIE STATKIEM MORSKIM<br />
Metoda Holenderska NSP (1965)<br />
metoda graficzna o argumentach:<br />
- stosunek prędkości statku do prędkości fali grawitacyjnej v/√gh◦<br />
- stosunek głębokości do zanurzenia statku h◦/T<br />
Metoda Brytyjska NPL (1973)<br />
- metoda graficzna złoŜona z trzech wykresów<br />
- posługująca się długością statku<br />
- pozwala określić osiadanie dziobu i rufy<br />
Najlepsze wyniki w tej metodzie uzyskano dla:<br />
- statków o współczynniku pełnotliwości 0,8-0,9<br />
- stosunek długości do szerokości = 6<br />
- szerokość do zanurzenia = 2,6<br />
- głębokość do zanurzenia = 1,1-1,5<br />
- prędkość od 0 do 20 węzłów<br />
- długość statku od 100 do 350 m<br />
- przegłębienie 1/100 na rufę lub 1/500 na dziób<br />
- jednostka bezwymiarowa jako część długości statku.<br />
SKRYPT – Rozdział XVI 8/13
Kpt.Ŝ.w. Tomasz Sobieszczański<br />
MANEWROWANIE STATKIEM MORSKIM<br />
W obecnych czasach, jak wiele i innych problemów na statku, i ten problem jest<br />
rozwiązywany przy pomocy specjalnych programów komputerowych będących<br />
składowymi pakietów statkowych. Powstało wiele programów, często opartych na<br />
starych, sprawdzonych metodach, do których parametry i argumenty zawierają<br />
tablice i wykresy w komputerze. Często, szczególnie dla duŜych i nowoczesnych<br />
statków, programy te mają indywidualny charakter.<br />
Z badań i analiz wyciągnięto wnioski, na bazie których opracowano pewne<br />
uogólnienia, które maja zastosowanie do większości problemów związanych z<br />
Ŝeglugą na płytkowodziach, w kanałach i innych rejonach ograniczonych. Do<br />
najwaŜniejszych wniosków naleŜą:<br />
1 – przebieg zmian wielkości osiadania moŜna przewidywać tylko dla warunków<br />
spływu ustalonego, t.zn dla prędkości podkrytycznej – mniejszej od prędkości fali<br />
grawitacyjnej.<br />
2 – wielkość osiadania wzrasta wraz ze wzrostem prędkości statku<br />
poruszającego się w tych samych warunkach głębokości i szerokości toru.<br />
3 – wielkość osiadania w tych samych warunkach zaleŜy od wielkości statku –<br />
wzrasta wraz z wielkością jednostek.<br />
SKRYPT – Rozdział XVI 9/13
Kpt.Ŝ.w. Tomasz Sobieszczański<br />
MANEWROWANIE STATKIEM MORSKIM<br />
4 – wielkość osiadania wzrasta wraz z malejącą głębokością i szerokością<br />
akwenu<br />
5 – najmniejsze osiadanie ma miejsce na płytkowodziu nieograniczonym brzegami<br />
6 – większe osiadanie występuje na pogłębionym torze<br />
7 – największe osiadanie ma miejsce w kanałach, w miejscach płytkich i<br />
ograniczonych brzegami.<br />
Z dotychczasowych badań wynika, Ŝe statki w większości wypadków zmieniają<br />
swoje przegłębienie na dziób, jedynie niewielkie i szybkie jednostki o smukłych<br />
kształtach, mogą zmieniać swoje przegłębienie na dziób lub rufę.<br />
Wzór empiryczny dla określenia kierunku przegłębienia przedstawia się<br />
następująco:<br />
Vw/√L<br />
Gdzie: Vw = prędkość statku [węzły]<br />
L = długość miedzy pionami [stopy]<br />
Stosunek większy od 1,2 – przegłębienie na rufę<br />
Stosunek = 1,2 – brak przegłębienia<br />
Stosunek mniejszy od 1,2 – przegłębienie na dziób<br />
Wartość przegłębienia nie jest wartością stałą dla danej sytuacji ruchu określonego<br />
statku i przyczyny i wielkości tych zmian winniśmy znać. Jednym z najwaŜniejszych<br />
problemów osiadania jest jego zmienność w zaleŜności od odległości burt od<br />
brzegów w kanale. Zejście z osi kanału i zbliŜenie się do jednego z jego brzegów<br />
powoduje wzrost osiadania statku, a wielkość wzrostu jest zaleŜna od prędkości<br />
statku. Prędkość statku poniŜej 4 węzłów nie powoduje zmian w osiadaniu, lub są<br />
one bardzo niewielkie. Prędkość 8-10 węzłów powoduje znaczne przyrosty<br />
osiadania przy zejściu z osi toru, nawet do 50% w stosunku do Ŝeglugi osią kanału.<br />
Inną niebezpieczną sytuacją, kiedy osiadanie statku zwiększa się nawet do 100%,<br />
jest mijanie się statków. Przy szybkości 4-5 węzłów następuje podwojenie wartości<br />
osiadania. Dalsze zwiększanie szybkości, do 8-9 węzłów, powoduje, Ŝe osiadanie<br />
jest mniejsze i osiąga tylko 50% osiadania na osi toru przy Ŝegludze samodzielnej.<br />
W gorszej sytuacji jest zawsze statek, który dla wyminięcia się, schodzi z osi toru<br />
do brzegu – na tym statku osiadanie zwiększa się bardziej niŜ na statku<br />
pozostającym podczas tego manewru na osi toru.<br />
Kolejnym problemem manewrowym związanym z osiadaniem podczas Ŝeglugi w<br />
kanale , na płytkowodziu, czy na pogłębionym torze wodnym są zmiany tego<br />
zjawiska podczas wyprzedzania statków., gdzie często osiadania zwiększa się<br />
nawet do 100%. Doświadczenia pozwoliły ustalić, Ŝe statek szybszy –<br />
wyprzedzający, podlega mniejszemu osiadaniu i powinien zejść z osim toru<br />
podczas manewru wyprzedzania. Statek wyprzedzany, biorąc pod uwagę<br />
osiadanie, powinien zachować kurs na osi toru.<br />
Na osiadanie statku mają teŜ wpływ inne czynniki a przede wszystkim konstrukcja<br />
statku:<br />
1 – dzioby gruszkowe wpływają na zmniejszenie się osiadania statku<br />
2 – statki o korzystnych współczynnikach pełnotliwości z zasady mają mniejsze<br />
tendencje do osiadania.<br />
3 – efekt ssania śruby w małym stopniu wpływa na efekt osiadania, choć w<br />
niewielkim stopniu zmniejsza przegłębienie na dziób.<br />
SKRYPT – Rozdział XVI 10/13
Kpt.Ŝ.w. Tomasz Sobieszczański<br />
MANEWROWANIE STATKIEM MORSKIM<br />
Badania zjawiska osiadania statków, mające olbrzymie znaczenie szczególnie dla<br />
statków duŜych, pozwoliły na określenie pewnych podstawowych zasad, które<br />
powinny być stosowane podczas Ŝeglugi w rejonach, gdzie takie zjawisko mogło by<br />
być niebezpieczne dla statku i Ŝeglugi.<br />
1 – wielkość osiadania moŜna zmniejszyć poprzez ograniczenie prędkości statku<br />
2 – przewidując Ŝeglugę w kanałach, czy na płytkowodziu naleŜy ładować statek na<br />
równą stępkę, aby częścią naraŜoną na kontakt z dnem był dziób statku<br />
3 – przekraczanie szybkości krytycznej na płytkowodziu czy w kanałach jest bardzo<br />
niebezpieczne, efekty osiadania w takim wypadku są trudne do przewidzenia –<br />
grozi to uderzeniem w dno.<br />
4 – naleŜy wcześniej, przed dojściem do płytkowodzia, zmniejszyć szybkość, gdyŜ<br />
przy gwałtownej zmianie głębokości moŜe dojść do przekroczenia szybkości<br />
krytycznej.<br />
5 – zachować szczególną ostroŜność przy wyprzedzaniu i wymijaniu na wąskich<br />
torach wodnych i kanałach (zwiększenie osiadania)<br />
6 – przy niewielkich zapasach wody pod kilem w planowanej Ŝegludze naleŜy<br />
starannie skalkulować wielkości osiadania, prędkość krytyczną i bezpieczną<br />
prędkość statku.<br />
Jeszcze jednym niebezpieczeństwem na płytkowodziu, które było przyczyną<br />
wielu niepoŜądanych kontaktów kadłuba z dnem, jest falowanie i związane z nim<br />
przechyły, tak boczne jak i wzdłuŜne, które w zrozumiały sposób zmniejszają nieraz<br />
w znaczny sposób odległość poszczególnych części kadłuba do dna.<br />
SKRYPT – Rozdział XVI 11/13
Kpt.Ŝ.w. Tomasz Sobieszczański<br />
MANEWROWANIE STATKIEM MORSKIM<br />
Jak moŜna prześledzić na powyŜszym wykresie zmiany zanurzenia<br />
spowodowane przechyłami bocznymi dla statków duŜych i bardzo duŜych mogą<br />
mieć wartość nawet kilkunastu stóp, co na wodach płytkich jest juŜ niebezpieczne<br />
Wartość przechyłów tak bocznych jak i poprzecznych jest zaleŜna od dwóch<br />
zasadniczych czynników: od warunków hydrometeorologicznych i stanu<br />
załadowania statku determinującego stateczność chwiejną statku. Zdajemy sobie<br />
sprawę, Ŝe w zasadzie akweny płytkowodzia są najczęściej rejonami przylądowymi,<br />
często osłoniętymi i nie występuje tam zbyt wysoka i długa fala, jak na wodach<br />
otwartych o większych głębokościach. Ale jednocześnie wiemy z doświadczenia, Ŝe<br />
np. na Morzu Północnym, które jest morzem szelfowym i płytkim, moŜe powstać<br />
fala, która stwarza istotne zagroŜenie dla statków nietylko o duŜym zanurzeniu.<br />
Z powyŜszych rozwaŜań wynika jeden niezaprzeczalny wniosek, Ŝe kaŜdy<br />
kapitan (nawigator), który planuje swoją podróŜ, musi starannie przeanalizować<br />
akweny płytkie, przez które będzie przebiegać planowana podróŜ.<br />
Mimo, Ŝe pozornie głębokości na mapie, na całej trasie, są większe od<br />
naszego zanurzenia, trzeba obliczyć maksymalne, niekorzystne zmiany tego<br />
zanurzenia biorąc pod uwagę wszystkie omówione powyŜej sytuacje:<br />
SKRYPT – Rozdział XVI 12/13
Kpt.Ŝ.w. Tomasz Sobieszczański<br />
MANEWROWANIE STATKIEM MORSKIM<br />
PARAMETRY<br />
STATKÓW<br />
(ZBIORNIKOWCE)<br />
ZMNIEJSZENIE <strong>ZAPAS</strong>U <strong>WODY</strong> <strong>POD</strong> STĘPKĄ WYWOŁANE<br />
FALOWANIEM AKWENU<br />
Fala<br />
Wys Okres<br />
okoś [s]<br />
ć [m]<br />
Kąt kursowy fali<br />
Kołys<br />
anie<br />
wzdłu<br />
Ŝne<br />
[m]<br />
000<br />
°<br />
Nurza<br />
nie<br />
[m]<br />
Raze<br />
m [m]<br />
Kołys<br />
anie<br />
wzdłu<br />
Ŝne<br />
[m]<br />
090<br />
°<br />
Nurza<br />
nie<br />
[m]<br />
Raze<br />
m [m]<br />
Kołys<br />
anie<br />
wzdłu<br />
Ŝne<br />
[m]<br />
045° oraz 135°<br />
Kołys<br />
anie<br />
poprz<br />
eczne<br />
[m]<br />
Nurza<br />
nie<br />
[m]<br />
Raze<br />
m<br />
dziób<br />
lub<br />
rufa<br />
[m]<br />
Śródo<br />
kręcie<br />
[m]<br />
Zaobl<br />
enie<br />
dziob<br />
u lub<br />
rufy<br />
[m]<br />
Nośność 17049 t<br />
L 149,00 m 4,57 10,00 2,80 0,15 2,96 2.93 2.13 5,06 2,50 2.35 0.76 3,26 3,11 3,93<br />
B 21,60 m 1,83 10,00 1,07 0,06 1,13 1.13 0,91 2,04 0,97 0,91 0,30 1,28 1,22 1,52<br />
T 9,14 m<br />
Nośność 37594 t<br />
L 203,00 m 4,57 10,00 2,80 0,30 3.11 3,78 1,52 5,30 2,50 3,05 0.53 3.05 3,58 4,42<br />
B 28,00 m 1,83 10,00 1,07 0,12 1,14 1,46 0,61 2.07 0,97 1,16 0,21 1,19 1.37 1,68<br />
T 10,97 m<br />
Nośność 45722 t<br />
L 216,00 m 4,57 10,00 2,74 0.24 2,99 4,02 1,07 5.09 2.47 3.20 0,37 2,83 3,57 4,39<br />
B 29,80 m 1,83 10,00 0,91 0,09 1,00 1,56 0,49 2.04 0.82 1,25 0,15 0,97 1.40 1,68<br />
T 11,58 m<br />
Nośność 60963 t<br />
L 236,00 m 4,57 30,00 2,47 0,15 2,62 4.45 0,82 5,27 2,22 3,57 0,29 2,53 3,87 4,60<br />
B 32,90 m 1,83 10,00 0,82 0,08 0.91 1.74 0,33 2.07 0,73 1.37 0,11 0,85 1,49 1,74<br />
T 12,44 m<br />
Nośność 81284 t<br />
L 257.00 m 4,57 10,00 2,20 0,12 2,38 4,88 0,61 5.49 1,98 3,90 0,21 2.19 4,1] 4,75<br />
B 36,30 m 1,83 10,00 0,97 0,00 0,97 1,89 0,24 2,13 0,88 1,52 0,08 0,97 1,61 1,92<br />
T 14,02 m<br />
1 – wejście na płytkowodzie z zachowaniem ostroŜności co do szybkości wejścia<br />
2 – przejście przez tor pogłębiony, najczęściej wybojowany, gdzie naleŜy<br />
pamiętać o tym , Ŝe osiadanie wzrasta podczas manewrów wymijania,<br />
wyprzedzania i zbliŜania się do płytszych miejsc toru<br />
3 – to samo dotyczy przejść kanałami, gdzie te zjawiska są bardziej intensywne<br />
4 – naleŜy teŜ przeanalizować prognozy pogody na czas przejścia przez wody<br />
płytkie, gdzie moŜe wystąpić istotne dla naszego statku falowanie (>Tabela str.12).<br />
SKRYPT – Rozdział XVI 13/13