Opsta teorija elektricnih masina
Opsta teorija elektricnih masina
Opsta teorija elektricnih masina

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
OPŠTA TEORIJA<br />
ELEKTRIČNIH MAŠINA<br />
1
SADRŽAJ<br />
1 OPŠTA TEORIJA ELEKTRIČNIH MAŠINA .............................................................4<br />
1.1 Opšti fizički model električne mašine........................................................................4<br />
1.1.1 Mehanički prolaz PM .........................................................................................5<br />
1.1.2 Električni prolaz PE............................................................................................5<br />
1.1.3 Mehanički izlaz GM ...........................................................................................7<br />
1.1.4 Električni izlaz GE .............................................................................................7<br />
1.2 Energetski bilans........................................................................................................7<br />
1.2.1 Mehanička akumulacija......................................................................................7<br />
1.2.2 Električna akumulacija .......................................................................................8<br />
1.2.3 Elektromehaničko pretvaranje energije..............................................................8<br />
1.3 Parametri..................................................................................................................10<br />
1.3.1 Osobine funkcije induktivnosti L .....................................................................11<br />
1.3.2 Primer određivanja funkcije induktivnosti .......................................................13<br />
1.3.3 Induktivnost višefaznih namotaja.....................................................................14<br />
1.4 Transformacije .........................................................................................................16<br />
1.4.1 Transformacija rasprezanja F ...........................................................................18<br />
1.4.2 Transformacija rotacije G.................................................................................19<br />
1.4.3 Realne transformacije.......................................................................................22<br />
1.4.3.1 Realna transformacija rasprezanja C.........................................................22<br />
1.4.3.2 Realna transformacija rotacije D...............................................................22<br />
1.4.3.3 Blondelova transformacija B....................................................................23<br />
1.4.4 Transformacije za trofaznu električnu mašinu .................................................25<br />
1.5 Sinhrone mašine.......................................................................................................26<br />
1.5.1 Transfomacija nivoa T......................................................................................26<br />
1.5.2 Matematički model sinhrone mašine u BrTs području.....................................28<br />
1.5.3 Ekvivalentna šema sinhrone mašine.................................................................29<br />
1.5.4 Parkove jednačine.............................................................................................31<br />
1.5.5 Ustaljeno stanje sinhrone mašine .....................................................................32<br />
1.6 Asinhrone mašine.....................................................................................................33<br />
1.6.1 Matematički model trofazne asinhrone mašine u originalnom području .........33<br />
1.6.2 Matematički model trofazne asinhrone mašine u kompleksnom obliku ..........34<br />
1.6.3 Ekvivalentna šema asinhrone mašine za prelazna stanja..................................37<br />
2
1.7 Mašine jednosmerne struje ......................................................................................38<br />
1.7.1 Ekvivalentna šema............................................................................................39<br />
1.7.2 Matematički model...........................................................................................39<br />
1.7.3 Jednačine ustaljenog stanja...............................................................................40<br />
1.8 Metode za rešavanje zadataka..................................................................................41<br />
1.8.1 Opšte jednačine stanja električne mašine .........................................................42<br />
1.8.2 Matematički model mašine jednosmerne struje u prostoru stanja...................43<br />
1.9 Literatura..................................................................................................................44<br />
3
1 OPŠTA TEORIJA ELEKTRIČNIH<br />
MAŠINA<br />
Cilj ovog poglavlja je da se, polazeći od opšte definicije električne mašine kao fizičkog<br />
objekta, dođe do opšteg apstraktnog oblika koji treba da bude njegova zamena, verna i<br />
pogodna za proučavanje a ujedno i efikasna za primenu.<br />
1.1 Opšti fizički model električne mašine<br />
Električnu mašinu posmatramo kao zatvoreni, ali pristupačni fizički objekt u kome se<br />
odigrava proces pretvaranja (konverzije) električne energije u mehaničku i obrnuto.<br />
Mašinu ćemo posmatrati kao “crnu kutiju”, bez ulaženja u konstrukcione detalje i fizički<br />
izgled. Preko elekričnog i mehaničkog prolaza mašina je spojena sa spoljnim objektima,<br />
izmenjujući sa njima električnu, odnosno mehaničku energiju. Prolazi mogu da imaju<br />
ulogu i ulaza i ulogu izlaza. U normalnim radnim stanjima jedan prolaz je ulaz, a drugi<br />
izlaz. Pored ove veze, postoji i neželjena (jednosmerna) veza preko izlaza za električne i<br />
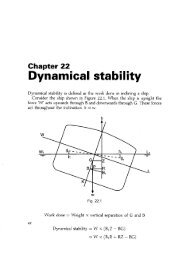
mehaničke gubitke. Opšti fizički model se može predstaviti kao crna kutija koja ima dva<br />
glavna (dvosmerna) prolaza – PE za električnu i PM za mehaničku energiju i dva<br />
sporedna (jednosmerna) izlaza za električne gubitke GE i mehaničke gubitke GM . Opšta<br />
<strong>teorija</strong> ima za cilj da procese elektromehaničkog pretvaranja energije unutar ove crne<br />
kutije modeluje odgovarajućim jednačinama.<br />
GE<br />
GM<br />
PE<br />
PROCES<br />
ELEKTROMEHANIČKOG<br />
PRETVARANJA ENERGIJE<br />
PM<br />
Slika 1-1 Električna mašina predstavljena kao crna kutija<br />
U analizi električnih mašina, koja sledi, koristićemo sledeće idealizacije:<br />
• pojave se dovoljno se tačno opisuju primenom koncentrisanih parametara, tj.<br />
odabraćemo pristup analize preko kola;<br />
• pojave kapacitivnog karaktera su zanemarljive, tj. nećemo razmatrati pojave pri<br />
visokim naponima i učestanostima;<br />
• gubici u magnetnom kolu su zanemarljivi;<br />
• zavisnost između fluksova i struja je linearna, tj. smatraćemo da je karakteristika<br />
magnećenja linearna, odnosno nećemo uzeti u obzir pojavu magnetnog zasićenja;<br />
• momenat inercije rotirajućih masa je konstantan.<br />
4
Za sve veličine koristiće se oznake sa malim slovima, jer se u opštem slučaju radi o<br />
trenutnim vrednostima (vremenski domen). Posmatraćemo obrtne električne mašine.<br />
Usvojeno je da je snaga pozitivna kada ulazi u mašinu.<br />
1.1.1 Mehanički prolaz PM<br />
Električna mašina se sastoji od dva čvrsta tela (stator i rotor) čiji se međusobni položaj<br />
može menjati sa jednim stepenom slobode. Relativni položaj između ta dva tela izražava<br />
se jednom promenljivom veličinom, koja je ugao ako se radi o rotaciji ili dužina ako se<br />
radi o translaciji. Stator je u principu nepokretan, tako da ova promenljiva daje<br />
istovremeno i relativni položaj rotora u odnosu na okolinu.<br />
Mehanička snaga koja se na ovom prolazu dovodi je:<br />
p<br />
m<br />
= ω m ,<br />
m<br />
m<br />
gde je m<br />
m<br />
spoljašnji mehanički moment, a ω<br />
m<br />
mehanička ugaona brzina obrtanja rotora.<br />
Mehanička snaga je pozitivna ako se dovodi na vratilo (generatorski režim rada električne<br />
mašine).<br />
Mehanička ugaona brzina rotora u odnosu na stator definisana je sa:<br />
dϑm<br />
ω<br />
m<br />
= ,<br />
d t<br />
gde je ϑ<br />
m<br />
ugao između nepokretne ose statora i ose na rotoru (mehanička koordinata), a t<br />
vreme.<br />
Pored toga je ω = 2π<br />
n 60, gde je n brzina obrtanja rotora u obrtajima u minuti.<br />
m<br />
Energija koja u vremenskom intervalu [ t<br />
0<br />
, t 1<br />
] prođe kroz mehanički prolaz PM određena<br />
je sa:<br />
∫<br />
t<br />
= 1<br />
m<br />
t0<br />
W p dt<br />
.<br />
m<br />
1.1.2 Električni prolaz PE<br />
Električna mašina sadrži određen broj prostih električnih kola (namotaja) koja su<br />
međusobno galvanski izolovana, ali magnetno spregnuta. Namotaji su nepokretni u<br />
odnosu na stator (statorski namotaji) ili u odnosu na rotor (rotorski namotaji), a može ih<br />
biti obeju vrsta.<br />
Električna snaga koja se preko para krajeva bilo kog namotaja u datom trenutku dovodi ili<br />
odvodi može se izraziti kao:<br />
pei = ii<br />
ui<br />
i = 1,2,3, ........, n<br />
gde je n ukupan broj namotaja a i i<br />
i u<br />
i<br />
su struja i napon i-tog namotaja.<br />
Prema usvojenoj konvenciji električna snaga je pozitivna za motorski režim rada.<br />
Ukupna električna snaga jednaka je algebarskom zbiru snaga svih namotaja:<br />
e<br />
n<br />
p = ∑i u .<br />
1<br />
i<br />
i<br />
5
Energija koja u vremenskom intervalu [ t<br />
0<br />
,t 1<br />
] prođe kroz električni prolaz PE je:<br />
∫<br />
t<br />
= 1<br />
e<br />
t0<br />
W p dt<br />
.<br />
e<br />
Između struje i napona postoji veza koja se opisuje zakonom naponske ravnoteže i<br />
zakonom elektromagnetske indukcije. Za svaki namotaj važi jednačina naponske<br />
ravnoteže:<br />
dψ<br />
i<br />
ui<br />
= Ri<br />
ii<br />
+ ,<br />
dt<br />
gde je<br />
n<br />
ψ<br />
i<br />
= ∑ Lik<br />
ik<br />
ukupni magnetski fluks (fluksni obuhvat) namotaja usled proticanja struja<br />
k = 1<br />
kroz sve namotaje,<br />
R<br />
i<br />
- otpornost i-tog namotaja,<br />
L<br />
ii<br />
- sopstvena induktivnost i-tog namotaja,<br />
L<br />
ik<br />
- međusobna induktivnost i-tog i k-tog namotaja.<br />
Uvođenjem matrične notacije imamo:<br />
⎡i1<br />
⎤<br />
⎢<br />
i<br />
⎥<br />
⎢ : ⎥<br />
⎢ ⎥<br />
⎣in<br />
⎦<br />
⎢<br />
2<br />
i ⎥ =[ i i .. i ] +<br />
, ⎢<br />
2<br />
u ⎥ = [ u u .. u ] +<br />
, ⎢<br />
2<br />
⎥ = [ ψ ψ .. ψ ] +<br />
=<br />
1 2 n<br />
⎡u1<br />
⎤<br />
⎢<br />
u<br />
⎥<br />
⎢ : ⎥<br />
⎢ ⎥<br />
⎣u<br />
n ⎦<br />
=<br />
1 2<br />
n<br />
⎡ψ<br />
1 ⎤<br />
⎢<br />
ψ<br />
⎥<br />
ψ =<br />
1 2<br />
n<br />
,<br />
⎢ : ⎥<br />
⎢ ⎥<br />
⎣ψ<br />
n ⎦<br />
⎡R1<br />
⎤<br />
⎢<br />
R<br />
⎥<br />
2<br />
R = ⎢<br />
⎥ = diag ( R1<br />
, R2<br />
,..., Rn<br />
) ,<br />
⎢ : ⎥<br />
⎢<br />
⎥<br />
⎣<br />
Rn<br />
⎦<br />
⎡L<br />
⎢<br />
⎢<br />
L<br />
L =<br />
⎢ :<br />
⎢<br />
⎣Ln<br />
11<br />
21<br />
1<br />
L<br />
L<br />
L<br />
12<br />
22<br />
:<br />
n2<br />
..<br />
..<br />
:<br />
..<br />
L<br />
L<br />
L<br />
1n<br />
2n<br />
:<br />
n4<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
dobija se matrična forma jednačina koja opisuje električni prolaz:<br />
+<br />
p<br />
e<br />
= i u ;<br />
dψ<br />
u = Ri + ;<br />
dt<br />
ψ = L i ;<br />
gde + označava transpoziciju matrice ili vektora (sa konjugacijom kod kompleksnih).<br />
U najopštijem slučaju naponi i struje su kompleksne promenljive vremena, zbog čega bi u<br />
jednačini za električnu snagu postojala osim transpozicije i kompleksna konjugacija<br />
vektora struje.<br />
6
1.1.3 Mehanički izlaz GM<br />
Mehanički gubici su posledica trenja u ležištima i trenja pokretnih delova mašine o vazduh<br />
ili uopšte o okolni fluid i obično se nazivaju gubicima trenja i ventilacije. Snaga<br />
mehaničkih gubitaka obično se može približno predstaviti kao:<br />
g<br />
= ω ,<br />
m<br />
K m<br />
gde je<br />
2<br />
m<br />
K<br />
m<br />
konstantan ili promenljiv koeficijent trenja.<br />
1.1.4 Električni izlaz GE<br />
Električni gubici nastaju u provodnicima usled Džulove toplote, kao posledica proticanja<br />
struje kroz namotaje pretvarača.<br />
Gubici u svakom od namotaja su:<br />
g = R<br />
ei<br />
i<br />
2<br />
i i<br />
tako da su ukupni gubici<br />
e<br />
n<br />
g = ∑ R<br />
1<br />
i<br />
2<br />
i i<br />
ili u matričnom obliku:<br />
g = i + R i .<br />
e<br />
Kao što je već napomenuto, zanemarićemo uticaj gubitaka u magnetnom kolu, budući da<br />
ih je teško analitički uzeti u obzir, jer se pristup prikazu mašine bazira na posmatranju<br />
električnih kola.<br />
1.2 Energetski bilans<br />
Prema zakonu o održanju energije, celokupna energija koja u određenom vremenskom<br />
intervalu uđe u mašinu mora da bude jednaka zbiru svih gubitaka energije i priraštaju<br />
energije akomulisane u mašini. Posmatrajmo bilans u toku vrlo kratkog vremenskog<br />
intervala, tako da se sve snage mogu za taj interval smatrati konstantnim. Tada važi:<br />
p<br />
m<br />
d t + p dt<br />
= g dt<br />
+ g dt<br />
+ da<br />
+ da<br />
,<br />
e<br />
m<br />
e<br />
gde su a<br />
m<br />
i ae<br />
akomulisana mehanička i električna energija, a<br />
priraštaji. Iz prethodne jednačine, za snagu imamo:<br />
p<br />
m<br />
+ p = g + g + d a dt<br />
+ da<br />
dt<br />
.<br />
e<br />
m<br />
e<br />
m<br />
e<br />
m<br />
e<br />
dam<br />
i ae<br />
d su odgovarajući<br />
1.2.1 Mehanička akumulacija<br />
Mehanička akumulacija je kinetička energija masa koje se obrću i iznosi:<br />
1 2<br />
am = J m<br />
ω<br />
m<br />
,<br />
2<br />
gde je J m<br />
momenat inercije rotirajućih masa. U ovoj analizi, kao što je već rečeno,<br />
smatraćemo da je moment inercije električne mašine konstantan. U praksi mogu nastupiti<br />
slučajevi kada je momenat inercije pokretnih delova van mašine, pa prema tome i<br />
7
ekvivalentni momenat inercije J<br />
m<br />
promenljiv, npr. kod elektromotornih pogona<br />
namotavača ili centrifuga, što se u ovom stepenu razvoja modela ne uzima u obzir.<br />
Priraštaj mehaničke akumulacije pri maloj promeni brzine je prema tome:<br />
d a = ω dω<br />
.<br />
m<br />
J m<br />
m<br />
m<br />
1.2.2 Električna akumulacija<br />
Električna akumulacija je prema zakonima elektromagnetike:<br />
n<br />
1<br />
a e<br />
= ∑i i<br />
ψ<br />
i<br />
,<br />
2 1<br />
ili u matričnom obliku<br />
1<br />
a = i + ψ . 2<br />
e<br />
Za linearna magnetna kola (nema magnetnog zasićenja), akumulisana energija je<br />
n n<br />
1<br />
ae<br />
= ∑ii<br />
∑ Lik<br />
ik<br />
,<br />
2 i=<br />
1 k=<br />
1<br />
ili u matričnom obliku<br />
1<br />
a = i + L i . 2<br />
e<br />
Priraštaj akumulacije je:<br />
1 + 1 + 1 + 1 + 1 +<br />
da<br />
e<br />
= i dψ<br />
+ di<br />
ψ = i dL i + i L di<br />
+ di<br />
L i<br />
2 2 2 2 2<br />
što se u slučaju magnetne linearnosti može svesti na jednostavniji oblik:<br />
1 +<br />
+<br />
da e<br />
= i d L i + i L di<br />
.<br />
2<br />
pošto je matrica induktivnosti L simetrična, tj. vredi<br />
+<br />
L =L .<br />
1.2.3 Elektromehaničko pretvaranje energije<br />
Snaga elektromehaničkog pretvaranja (konverzije) energije,<br />
p<br />
c<br />
= p − g −d a dt<br />
= − p + g + da<br />
dt<br />
.<br />
e<br />
e<br />
e<br />
m<br />
m<br />
m<br />
p<br />
c<br />
se dobija iz:<br />
Uz zamenu izraza za pojedine električne snage i uzimajući u obzir jednačinu naponske<br />
dψ<br />
ravnoteže u = R i + imamo:<br />
dt<br />
p c<br />
1 ⎛<br />
=<br />
⎜i<br />
2 ⎝<br />
+<br />
+<br />
dψ<br />
di<br />
−<br />
dt<br />
dt<br />
⎞<br />
ψ<br />
⎟ .<br />
⎠<br />
8
Zamenom<br />
ψ = L i , konačno imamo:<br />
p 1 d L = i +<br />
i .<br />
c<br />
2 d t<br />
Induktivnosti mašine mogu da zavise od vremena posredno, preko koordinate položaja<br />
rotora, ϑ = ω d t , zbog čega je:<br />
d L<br />
d t<br />
m<br />
dL<br />
∫<br />
dϑ<br />
m<br />
= =<br />
m<br />
.<br />
dϑm<br />
dt<br />
dϑm<br />
m<br />
dL<br />
ω<br />
Uz zamenu izraza za pojedine mehaničke snage, za snagu elektromehaničkog pretvaranja<br />
imamo:<br />
2 d ⎛ 1 2 ⎞<br />
pc<br />
= −ω mmm<br />
+ K<br />
mω<br />
m<br />
+ ⎜ J<br />
m<br />
ω<br />
m ⎟ .<br />
dt<br />
⎝ 2 ⎠<br />
Momenat konverzije (elektromagnetni obrtni moment),<br />
snage konverzije izrazom:<br />
p<br />
c<br />
= ω m .<br />
m<br />
c<br />
Iz prethodnih jednačina za snagu konverzije, za moment konverzije važi:<br />
L<br />
m 1 d<br />
c<br />
= i + i ,<br />
2 dϑm<br />
odnosno<br />
m<br />
dω m<br />
c = − mm<br />
+ J<br />
m +<br />
d<br />
t<br />
K<br />
m<br />
ω<br />
m<br />
.<br />
m c<br />
, se može definisati preko<br />
i + 2<br />
El. snaga<br />
p e<br />
2<br />
R i<br />
K<br />
m<br />
ω<br />
m<br />
El. gubici Meh. gubici<br />
i + u<br />
m m<br />
g e Snaga<br />
g m<br />
konverzije<br />
p c<br />
Meh. snaga<br />
p m<br />
da e<br />
dt<br />
1 +<br />
i<br />
2<br />
dL<br />
i<br />
dt<br />
d a m<br />
dt<br />
d i + L i<br />
dt<br />
Električna akomulacija<br />
2<br />
d J m<br />
ω<br />
m<br />
dt<br />
2<br />
Mehanička akomulacija<br />
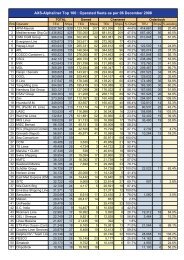
Slika 1-2 Energetski bilans električne mašine izražen induktivnostima i snagama<br />
9
Na osnovu izvedenih relacija, za osnovni matematički model obrtne električne mašine<br />
imamo:<br />
dψ<br />
u = R i + ;<br />
dt<br />
ψ = L i ;<br />
m<br />
m c<br />
d<br />
dω<br />
m<br />
m<br />
= J<br />
m<br />
+ K<br />
mω<br />
m<br />
dt<br />
1 d L = i + i ;<br />
2 dϑ<br />
ϑ<br />
m = ω<br />
m<br />
dt<br />
.<br />
m<br />
− m ;<br />
c<br />
1.3 Parametri<br />
Parametri osnovnog matematičkog modela su: K<br />
m<br />
, J<br />
m<br />
, R i L . Od posebnog značaja su<br />
induktivnost L i međuinduktivnost M , sakupljene u matrici induktivnosti L . Vrsta<br />
elekrične mašine određuje pojedine elemente matrice L . U izlaganju koje sledi biće<br />
razrađene osobine ovih induktivnosti i dati opšti obrasci za izražavanje njihove zavisnosti<br />
od položaja rotora i drugih relevantnih veličina.<br />
Razdelimo navoje mašine na statorske i rotorske. Sada za matrice otpornosti i<br />
induktivnosti imamo:<br />
⎡R<br />
⎤<br />
= , = ( R R<br />
r<br />
),<br />
⎣ ⎦<br />
s<br />
R ⎢ R diag<br />
s<br />
,<br />
R<br />
⎥<br />
r<br />
⎡L<br />
ss<br />
L<br />
sr ⎤<br />
L = ⎢ ⎥ .<br />
⎣L<br />
rs<br />
L<br />
rr ⎦<br />
Dijagonalne submatrice matrice induktivnosti su kvadratne i simetrične:<br />
T<br />
L<br />
ss<br />
= L ss<br />
.<br />
Nedijagonalne submatrice matrice induktivnosti su u opštem slučaju pravouglene,<br />
ik ki<br />
+<br />
dimenzija ( s, r)<br />
i ( r, s)<br />
, nesimetrične, ali međusobno simetrične: L<br />
sr<br />
= Lrs<br />
, tj. L sr<br />
= L rs<br />
,<br />
gde je i indeks vrste, a k indeks kolone.<br />
Prema zakonima elektromagnetike može se međuinduktivnost bilo kog para navoja,<br />
odnosno samoinduktivnost jednog navoja napisati u obliku:<br />
ik<br />
xy<br />
ik<br />
xy<br />
i k ik ik i k<br />
( ϑ , γ , γ ) l N N<br />
L = f<br />
µ<br />
,<br />
m<br />
xm<br />
ym<br />
gde je<br />
x, y može da bude s ili r ,<br />
f - funkcija položaja,<br />
xy<br />
ϑm<br />
- koordinata položaja rotora u odnosu na stator,<br />
xy<br />
x<br />
y<br />
10
i<br />
γ<br />
xm<br />
- koordinata koja određuje položaj navoja i na statoru ( x = s)<br />
ili rotoru ( r)<br />
odnosu na statorsku ( y = s)<br />
ili rotorsku ( y = r)<br />
osu,<br />
µ - osobina sredine,<br />
l - geometrija i dimenzije sredine,<br />
N - broj (evi) navojaka navoja statora odnosno rotora.<br />
x = u<br />
1.3.1 Osobine funkcije induktivnosti L<br />
1. Funkcija f , odnosno<br />
ik<br />
L<br />
xy<br />
, je PERIODIČNA u odnosu na ϑ<br />
m<br />
i γ<br />
m<br />
.<br />
Posle svakog punog okretaja rotora ili posle svakog (zamišljenog) punog okretaja<br />
posmatranog navoja oko obrtne ose pri nepokretnom rotoru, čitav elektromagnetni sistem<br />
je isti kao pre okretaja.<br />
2. Osobina VIŠEPOLNOSTI<br />
Perioda funkcije L je 2 π s obzirom na promeljive ϑ i γ , gde su:<br />
ϑ = Pϑ m<br />
i γ = Pγ<br />
m<br />
. Broj P nazivaćemo periodnim brojem mašine, a promenljiveϑ i γ<br />
električnim koordinatama rotora, odnosno navoja, ili jednostavno, električnim uglovima.<br />
Broj P se u određenim slučajevima poklapa sa brojem pari polova.<br />
Kada se u jednačine osnovnog matematičkog modela uvedu električne koordinate, dobija<br />
se sledeći model:<br />
dψ<br />
u = R i + ;<br />
dt<br />
ψ = L(ϑ<br />
) i ;<br />
m m<br />
dω<br />
= J + Kω<br />
− Pm ;<br />
dt<br />
1 d L m = i + i ;<br />
2 dϑ<br />
dϑ = ω ;<br />
dt<br />
mc<br />
K<br />
m<br />
J<br />
m<br />
gde je: m = , K = , J = i ω = Pω<br />
m<br />
.<br />
P P P<br />
Kada se radi o višepolnom navoju, njegove polne sekcije su vezane redno, tako da struja u<br />
njima proizvodi flukseve usmerene na isti način.<br />
3. JEDNOSTRANA ISTURENOST<br />
Funkcije<br />
ik<br />
L<br />
rr<br />
(rotorske induktivnosti) ne zavise od ϑ (položaja rotora prema statoru) ako je<br />
L ik ≠ rr<br />
f ϑ .<br />
stator cilindričan i gladak (bez žljebova) bez obzira na oblik rotora: ( )<br />
11
IDEALIZACIJA: Zanemaruje se uticaj žljebova i zubaca statora na induktivnost.<br />
Izraz za rotorske induktivnosti preko dvostrukog Furijeovog reda:<br />
L<br />
L<br />
ik<br />
rr<br />
i k<br />
ik i k<br />
i k<br />
( γ γ ) =∑∑ L ( γ , γ ) γ , γ ≠ f ( ϑ)<br />
ik<br />
rr,<br />
mn<br />
r<br />
,<br />
r<br />
rr,<br />
mn<br />
m n<br />
r<br />
r<br />
i k ik<br />
i<br />
k ik<br />
i<br />
k<br />
( γ<br />
r<br />
, γ<br />
r<br />
) = Arr,<br />
mn<br />
cos( mγ<br />
r<br />
) cos( nγ<br />
r<br />
) + Brr,<br />
mn<br />
cos( mγ<br />
r<br />
) sin( nγ<br />
r<br />
)<br />
ik<br />
i<br />
k ik<br />
i<br />
k<br />
+ C sin( mγ<br />
) cos( nγ<br />
) + D sin( mγ<br />
) sin( nγ<br />
)<br />
rr,<br />
mn<br />
r<br />
r<br />
r<br />
r<br />
rr,<br />
mn<br />
r<br />
r<br />
+<br />
gde su A , B,<br />
C i D odgovarajući Furijeovi koeficijenti. Poznavanje ovih koeficijenata nije<br />
bitno za sledeće izlaganje.<br />
k<br />
k<br />
γ<br />
s<br />
k<br />
γ<br />
sr<br />
i<br />
i<br />
γ<br />
s<br />
i<br />
γ<br />
sr<br />
r<br />
ϑ<br />
s<br />
Slika 1-3 Geometrijski prikaz koordinata rotora i navoja (oba na statoru)<br />
4. Osobina JEDNOOSNE SIMETRIČNOSTI<br />
Funkcija<br />
L<br />
ik<br />
rr<br />
ik<br />
L<br />
rr<br />
je parna s obzirom na obe promenljive (koordinate)<br />
i k ik i k<br />
( − γ , −γ<br />
) = L ( γ , γ )<br />
r<br />
r<br />
rr<br />
r<br />
r<br />
U ovom slučaju su Furijeovi koeficijenti B iC jednaki nuli.<br />
i<br />
γ r<br />
k<br />
γ<br />
r<br />
, tj. važi:<br />
Kada se uvede uslov parnosti i primene odvarajući trigonometrijski obrasci, imamo<br />
OSNOVNU FORMULU INDUKTIVNOSTI:<br />
L<br />
i k ik<br />
i k ik<br />
i k<br />
( γ γ ) = M cos( mγ<br />
− nγ<br />
) + N cos( mγ<br />
+ nγ<br />
),<br />
m,<br />
n 0,1, ...<br />
ik<br />
xy, mn r<br />
,<br />
r xy,<br />
mn<br />
xr yr xy,<br />
mn<br />
xr yr<br />
=<br />
Koordinate u prethodnom izrazu se izražavaju (mere) u odnosu na rotor!<br />
Koeficijent N = 0 za mašinu sa ravnomernim procepom (cilindrični stator i rotor).<br />
12
IDEALIZACIJA: pretpostavlja se da je fluks (obrtno magnetno polje) u zazoru sinusan, tj.<br />
zanemaruju se prostorni harmonici.<br />
Preciznije rečeno, uzet je u obzir SAMO OSNOVNI HARMONIK dvostrukog Furijovog<br />
reda ( m = n = 1):<br />
L<br />
ik<br />
xy<br />
i k ik i k ik i k<br />
( γ , γ ) = M cos( γ −γ<br />
) + N cos( γ + γ )<br />
r<br />
r<br />
xy<br />
xr<br />
što je za većinu praktičnih primena zadovoljavajuće.<br />
1.3.2 Primer određivanja funkcije induktivnosti<br />
1. Po jedan navoj na rotoru i statoru<br />
yr<br />
xy<br />
xr<br />
yr<br />
k<br />
k<br />
γ<br />
s<br />
k<br />
γ<br />
sr<br />
i<br />
r<br />
ϑ<br />
s<br />
Slika 1-4 Primer električne mašine sa po jednim navojem na rotoru (i) i statoru (k)<br />
Osa rotora ( r ) ne mora da se poklapa sa osom navoja na rotoru. Ona je čisto vezana za<br />
rotor.<br />
Svi uglovi se svode na rotorsku referentnu osu.<br />
L<br />
ik<br />
rs<br />
ik<br />
rs<br />
i k ik i k<br />
( γ −γ<br />
) + N ( γ + γ )<br />
= M cos<br />
cos<br />
gde je<br />
k<br />
γ<br />
s<br />
zapravo<br />
r<br />
sr<br />
γ<br />
k<br />
ss<br />
, a<br />
k<br />
uz γ = γ<br />
k sr s<br />
−ϑ<br />
imamo:<br />
L<br />
ik<br />
rs<br />
ik<br />
rs<br />
rs<br />
r<br />
sr<br />
i<br />
i<br />
γ<br />
r<br />
zapravo γ<br />
rr<br />
.<br />
k i ik<br />
k i<br />
[ ϑ − ( γ −γ<br />
)] + N [ ϑ − ( γ + γ )]<br />
= M cos<br />
cos<br />
s<br />
r<br />
rs<br />
s<br />
Kod člana uz N iskorišteno je svojstvo parnosti kosinusne funkcije, tj. ( α) cosα<br />
2. oba navoja na statoru<br />
i<br />
γ<br />
L<br />
= i sr s<br />
ik<br />
ss<br />
γ −ϑ<br />
ik<br />
ss<br />
i k ik<br />
i k<br />
[ γ −γ<br />
] + N cos[ ϑ − ( γ + γ )]<br />
= M cos<br />
2<br />
s<br />
i<br />
ss<br />
s<br />
s<br />
13<br />
r<br />
cos − = .
Važno je primetiti da ako mašina ima ravnomerni procep ( N = 0 ) i ako su navoji i i k<br />
ik<br />
električno pomereni za π 2 onda je međuinduktivnost L<br />
rs<br />
= 0 , tj. ne pojavljuje se ovaj<br />
član u matrici induktivnosti.<br />
Drugim rečima, ako nekom transformacijom postavimo navoje u položaj sa međusobnim<br />
ik<br />
uglom od π 2 i ako takođe procep učinimo ravnomernim, onda je L<br />
sr<br />
= 0 , odnosno navoji<br />
više nisu spregnuti.<br />
1.3.3 Induktivnost višefaznih namotaja<br />
Sledećom dopunom definicije električne mašine se sužava klasa mašina koje se<br />
proučavaju.<br />
DEFINICIJA: Navoji električne mašine su grupisani u višefazne namotaje. Višefazni<br />
namotaj je grupa navoja na statoru ili grupa navoja na rotoru koja ima sledeće osobenosti:<br />
1. svi navoji su jednaki,<br />
2. ose ma kojeg para navoja razmaknute su za električni ugao koji je celobrojni deo<br />
punog ugla ili celobrojni umnožak tog ugla.<br />
Neka je celobrojni broj sa kojim se deli pun krug q (broj faza). Tada je ugao između ma<br />
kojeg para navoja (faznih navoja) sa indeksima i i k :<br />
γ<br />
i<br />
xr<br />
k 2π<br />
− γ<br />
xr<br />
= ( i − k)<br />
, gde je x = s ili r ,<br />
q<br />
x<br />
i , k = 1, 2, ......, q .<br />
Broj navoja u višefaznom namotaju može biti različit, ali najviše jednak q . Ako je broj<br />
navoja manji od q radi se o nepotpunom q -faznom namotaju. U daljnjem razmatranju<br />
smatraćemo da je broj navoja upravo jednak q .<br />
Za q = 1 i q = 2 - jednofazni namotaji, q = 4 ali sa svega dva navoja pod električnim uglom<br />
od π 2 - dvofazni namotaj.<br />
Iz uslova jednakosti namotaja proizlazi da možemo da posmatramo samo po jedan<br />
namotaj na statoru i rotoru i za matricu otpornosti možemo jednostavnije pisati:<br />
⎡R<br />
s ⎤<br />
R = ⎢<br />
R<br />
s<br />
= R<br />
s<br />
I R<br />
r<br />
= R<br />
r<br />
I<br />
R<br />
⎥ , , ,<br />
⎣<br />
r ⎦<br />
gde je I jedinična matrica koja ima za statorski odnosno rotorski namotaj ima dimenzije<br />
q , .<br />
( q<br />
s<br />
, q s<br />
), odnosno (<br />
r<br />
q r<br />
)<br />
x<br />
Za električni ugao od rotorske referentne ose r do posmatranog navoja imamo:<br />
γ<br />
i<br />
xr<br />
gde je<br />
1 2π<br />
i<br />
= γ<br />
xr<br />
+ ( i −1)<br />
ili γ<br />
q<br />
x<br />
xr<br />
= γ<br />
0 xr<br />
+<br />
2π<br />
i<br />
q<br />
x = s ili r , i = 1, 2, .....,qx<br />
ili i = 0,<br />
1,....., qx<br />
−1.<br />
x<br />
Dakle, u prvom slučaju referentni namotaj ima indeks 1, dok u drugom slučaju ima indeks<br />
0.<br />
14
Pri tome treba imati u vidu relaciju: γ<br />
1 = γ<br />
1<br />
xr xs<br />
−ϑ<br />
kojom se referiranje prvog, a time i svih<br />
ostalih navoja namotaja sa indeksom x , prebacuje sa rotorske referentne ose na statorsku<br />
referentnu osu.<br />
Sada za opštu formulu induktivnosti višefaznog namotaja imamo:<br />
L<br />
ili<br />
L<br />
ik<br />
xy<br />
ik<br />
xy<br />
= M<br />
+ N<br />
xy<br />
xy<br />
⎡<br />
cos ⎢γ<br />
⎢⎣<br />
⎡<br />
cos ⎢γ<br />
⎢⎣<br />
1<br />
xr<br />
1<br />
xr<br />
− γ<br />
+ γ<br />
1<br />
yr<br />
1<br />
yr<br />
+<br />
+<br />
2π<br />
q<br />
x<br />
2π<br />
q<br />
x<br />
2π<br />
q<br />
( i −1) − ( k −1)<br />
2π<br />
q<br />
( i −1) + ( k −1)<br />
y<br />
y<br />
⎡ ⎛<br />
⎞⎤<br />
⎡ ⎛<br />
⎞⎤<br />
0 0<br />
⎢ ⎜<br />
2π<br />
2π<br />
⎟<br />
0 0<br />
⎥ + ⎢ + + ⎜<br />
2π<br />
2π<br />
= M<br />
+ ⎟<br />
xy<br />
cos γ<br />
xr<br />
− γ<br />
yr<br />
+ i − k N<br />
i k ⎥<br />
⎢<br />
xy<br />
cos γ<br />
xr<br />
γ<br />
yr<br />
.<br />
⎥ ⎢<br />
⎣ ⎝ qx<br />
q<br />
y ⎠⎦<br />
⎣ ⎝ qx<br />
q<br />
y ⎠⎥⎦<br />
Matrica induktivnosti<br />
nenultih elemenata.<br />
Primenom Ojlerovog obrasca:<br />
⎤<br />
⎥ +<br />
⎥⎦<br />
⎤<br />
⎥<br />
⎥⎦<br />
⎡L<br />
ss<br />
L<br />
sr ⎤<br />
L = ⎢ ⎥ u opštem slučaju ima velike dimenzije i mnogo<br />
⎣L<br />
rs<br />
L<br />
rr ⎦<br />
jα<br />
− jα<br />
e + e<br />
cosα<br />
= na sve elemente u matrici L imamo:<br />
2<br />
F F +<br />
⎡F<br />
⎤ ⎡L<br />
L ⎤ ⎡F<br />
⎤ F<br />
s<br />
ss sr s<br />
L = ⎢ ⎥ ⎢ ⎥ ⎢ =<br />
+ ⎥ F L F<br />
F F<br />
⎣ Fr<br />
⎦ ⎣L<br />
rs<br />
L<br />
rr ⎦ ⎣ Fr<br />
⎦<br />
+<br />
⎡ 1 1 ⎤<br />
⎢<br />
⎥<br />
⎢<br />
α<br />
x<br />
α<br />
x<br />
1<br />
⎥<br />
2 2<br />
F = ⎢<br />
⎥<br />
x<br />
α<br />
x<br />
α<br />
x<br />
,<br />
qx<br />
⎢<br />
⎥<br />
⎢ : : ⎥<br />
q −1<br />
⎢<br />
x q x −1<br />
⎣α<br />
⎥<br />
x<br />
α<br />
x ⎦<br />
gde je α<br />
x<br />
2<br />
j<br />
q x<br />
π<br />
= e , x = s ili r , a crta iznad slova (npr.α ) oznaka za konjugaciju.<br />
Ovo je Forteskjuova transformacija, koja predstavlja opšti slučaj metode simetričnih<br />
komponenti. Za trofazni sistem bez nulte komponente imamo sledeći oblik matrice F :<br />
F x<br />
=<br />
⎡ 1<br />
1 ⎢<br />
⎢<br />
α<br />
3<br />
⎢⎣<br />
α<br />
1 ⎤<br />
α<br />
⎥<br />
⎥<br />
α ⎥⎦<br />
15
Nulte komponente, pored para glavnih, dopunjuju broj komponenata do q , raspregnute su<br />
od glavnih i ne učestvuju u elektromehaničkom pretvaranju energije. Ako one nisu nule, a<br />
potrebno ih je uzimati u obzir, mogu se tretirati izdvojeno, uz kasnije superponiranje<br />
rezultata.<br />
Posebno uzimajući u obzir isturenost statora, odnosno rotora preko odgovarajuće matrice<br />
∆ L xy<br />
, za matrice induktivnosti na kojima je primenjena Forteskjuova transformacija<br />
imamo:<br />
L<br />
F<br />
ss<br />
2<br />
⎡1<br />
0⎤<br />
⎡ 0 τ ⎤<br />
= L<br />
ss ⎢ ⎥ + ∆L<br />
ss ⎢ ⎥ ; τ = e<br />
2<br />
⎣0<br />
1⎦<br />
⎣τ<br />
0 ⎦<br />
jϑ<br />
L<br />
F<br />
sr<br />
= L<br />
sr<br />
⎡τ<br />
⎢<br />
⎣0<br />
0⎤<br />
τ<br />
⎥<br />
⎦<br />
+<br />
∆L<br />
sr<br />
⎡0<br />
⎢<br />
⎣τ<br />
τ ⎤<br />
0<br />
⎥<br />
⎦<br />
=<br />
F<br />
( L ) +<br />
rs<br />
L<br />
F<br />
rr<br />
= L<br />
rr<br />
⎡1<br />
⎢<br />
⎣0<br />
0⎤<br />
1<br />
⎥<br />
⎦<br />
+ ∆L<br />
rr<br />
⎡0<br />
⎢<br />
⎣1<br />
1⎤<br />
0<br />
⎥<br />
⎦<br />
Pomoću matrica transformacija prvobitna (originalna) matrica se transformiše u kvadratnu<br />
matricu dimenzija 4x4.<br />
Matrica F L za mašinu sa dva namotaja:<br />
⎡<br />
⎢L<br />
F<br />
L = ⎢<br />
⎢<br />
⎢L<br />
⎣<br />
ss<br />
sr<br />
⎡1<br />
⎢<br />
⎣0<br />
⎡τ<br />
⎢<br />
⎣0<br />
0⎤<br />
1<br />
⎥<br />
⎦<br />
0⎤<br />
τ<br />
⎥<br />
⎦<br />
L<br />
L<br />
sr<br />
rr<br />
⎡τ<br />
⎢<br />
⎣0<br />
⎡ 1<br />
⎢<br />
⎣ 0<br />
0⎤⎤<br />
⎥<br />
τ<br />
⎥<br />
⎦⎥<br />
0⎤⎥<br />
1<br />
⎥⎥<br />
⎦⎦<br />
+<br />
⎡<br />
⎢∆L<br />
⎢<br />
⎢<br />
⎢∆L<br />
⎣<br />
ss<br />
sr<br />
⎡ 0<br />
⎢ 2<br />
⎣τ<br />
⎡ 0<br />
⎢<br />
⎣τ<br />
2<br />
τ ⎤<br />
⎥<br />
0 ⎦<br />
τ ⎤<br />
0<br />
⎥<br />
⎦<br />
∆L<br />
∆L<br />
sr<br />
rr<br />
⎡0<br />
⎢<br />
⎣τ<br />
⎡0<br />
⎢<br />
⎣1<br />
τ ⎤⎤<br />
⎥<br />
0<br />
⎥<br />
⎦⎥<br />
1⎤⎥<br />
⎥⎥<br />
0⎦⎦<br />
Drugi član se pojavljuje ako rotor ima isturene polove.<br />
Za više namotaja matrica se proširuje.<br />
1.4 Transformacije<br />
Cilj transformacija je da se sistemi diferencijalnih jednačina sa promenljivim<br />
koeficijentima, koji se ne mogu rešavati analitički, primenom linearnih tranformacija<br />
dovedu do oblika sistema diferencijalnih jednačina sa konstantnim koeficijentima. Dakle,<br />
cilj je da se dođe do analitičkih izraza pogodnijih za rešavanje konkretnih zadataka, do<br />
takozvanih transformisanih matematičkih modela.<br />
Sa fizičke tačke gledišta mašina se zamenjuje ekvivalentnom, ali jednostavnijom i<br />
preglednijom mašinom i proučavanja se vrše na takvoj, transformisanoj mašini umesto na<br />
originalnoj.<br />
16
Transformacije rasprezanja imaju kao efekat bitno smanjenje nenultih elemenata<br />
međusobnih induktivnosti u matrici induktivnosti. Matematički postupak se svodi na<br />
potpunu ili nepotpunu dijagonalizaciju (ili čak redukciju dimenzija) pojedinih submatrica<br />
matrice induktivnosti.<br />
U fizičkom smislu posmatrana višefazna mašina se zamenjuje dvofaznom.<br />
Transformacije kretanja imaju za cilj postizavanje nezavisnosti matrice induktivnosti od<br />
položaja rotora i vremena, čime se može postići značajno uprošćavanje rešavanja sistema<br />
diferencijalnih jednačina. Pošto se samim postupkom transformacije ne gube informacije,<br />
zavisnost od položaja rotora će se javiti na drugom mestu- u samoj transformacionoj<br />
matrici i u vidu dopunskih (“dinamičkih”) članova u momentnoj i naponskoj jednačini.<br />
Transformacije kretanja se mogu posmatrati kao zamena mašine statičkim<br />
transformatorom, jer se na određeni način isključuje relativno kretanje rotora prema<br />
statoru, a uticaj tog kretanja zamenjuje se dodatnim, “dinamičkim” elektromotornim<br />
silama. Ove transformacije su ekvivalentne geometrijskim transformacijama koordinatnog<br />
sistema.<br />
Transformacije nivoa se primenjuju za pojedine namotaje i imaju za cilj izjednačenje<br />
njihovih naponskih nivoa (slično svođenju sekundara nekog transformatora na primar).<br />
Transformacija je, dakle, zamena parametara pri čemu dolazi do novih jednačina.<br />
Za kvadratnu matricu A kažemo da je regularna (invertibilna) matrica ako vredi:<br />
−1<br />
−1<br />
−1<br />
A ⋅A<br />
= A ⋅A<br />
= I , gde je A inverzna matrica matrice A . Ako kvadratna matrica nije<br />
regularna, onda je singularna.<br />
Na primeru pogledajmo kako se primenjuje npr. A transformacija.<br />
Neka su originalne matrice ψ , L i i a transformisane (nove) matrice A ψ , A L i A i .<br />
Za vektore vredi:<br />
+<br />
i<br />
staro<br />
= A i<br />
novo<br />
, odnosno obrnuto i<br />
novo<br />
A i<br />
staro<br />
= .<br />
+<br />
+<br />
Za matrice vredi L<br />
staro<br />
= A L<br />
novo<br />
A , odnosno obrnuto L<br />
novo<br />
= A L<br />
staro<br />
A .<br />
Imamo:<br />
ψ =Li<br />
A<br />
ψ = A ψ ,<br />
A<br />
A<br />
i = A i<br />
A<br />
A<br />
A A A<br />
−1<br />
−1<br />
i / A ψ A L A i L i<br />
ψ = A ψ = L A ⋅ ⇒ = =<br />
Prethodnu matričnu jednačinu u kojoj je na sve matrice primenjena matrica<br />
transformacije A skraćeno možemo da pišemo u obliku:<br />
[ A :]<br />
ψ =L i<br />
Transformacija se može vršiti i sa neregularnom matricom F .<br />
17
1.4.1 Transformacija rasprezanja F<br />
ψ =Li<br />
F<br />
ψ = F ψ ,<br />
F<br />
F<br />
i =F i<br />
ψ = F ψ = L F i / ⋅F<br />
F<br />
F<br />
F<br />
F<br />
F<br />
ψ = F<br />
+ +<br />
L F i = L i , dakle L = F L F .<br />
+<br />
+<br />
+<br />
ako je ispunjen uslov: F F = I ( F F ≠ I)<br />
F<br />
imamo:<br />
dψ<br />
u = R i + ;<br />
dt<br />
F<br />
F u<br />
F<br />
d ( F ψ)<br />
= R F i +<br />
d t<br />
F<br />
/ ⋅F<br />
+<br />
; F ≠<br />
f<br />
( t,<br />
ϑ)<br />
F F<br />
F<br />
d<br />
F F<br />
+<br />
+<br />
+ ψ d ψ<br />
F F u = u = F R F i + F F = R i +<br />
dt d t<br />
pošto je matrica R dijagonalna, imamo<br />
F<br />
F<br />
F<br />
R = R .<br />
Uz<br />
F<br />
i = F i i<br />
F<br />
+ = +<br />
i +<br />
F<br />
i imamo:<br />
1<br />
m = i<br />
2<br />
+<br />
d L<br />
i<br />
dϑ<br />
=<br />
1<br />
2<br />
F<br />
+<br />
i<br />
F<br />
+<br />
F<br />
dL<br />
F⋅i<br />
=<br />
dϑ<br />
1<br />
2<br />
F<br />
+<br />
i<br />
+<br />
d( F L F )<br />
dϑ<br />
F<br />
i =<br />
1<br />
2<br />
F<br />
+<br />
i<br />
F<br />
d L<br />
dϑ<br />
F<br />
i<br />
Opšti model mašine u F području:<br />
[ F :]<br />
dψ<br />
u = R i + ;<br />
dt<br />
ψ = L(ϑ<br />
) i ;<br />
m m<br />
dω<br />
= J + Kω<br />
− Pm ;<br />
dt<br />
1 d L m = i + i ;<br />
2 dϑ<br />
dϑ = ω .<br />
dt<br />
Za stator i rotor ove jednačine se transformišu u jednu algebarsku jednačinu, gde naponi,<br />
struje i fluksevi više nisu matrične, nego kompleksne veličine:<br />
18
[ F :]<br />
u<br />
u<br />
s<br />
r<br />
dψ<br />
s<br />
= Rs<br />
is<br />
+ ;<br />
dt<br />
dψ<br />
r<br />
= Rr<br />
ir<br />
+ ;<br />
dt<br />
2<br />
ψ = L i + τ L i + τ ∆L<br />
i + τ ∆L<br />
s<br />
r<br />
s<br />
s<br />
sr<br />
s<br />
sr<br />
r<br />
r<br />
ψ = τ L i + L i + τ ∆L<br />
i + ∆L<br />
i ;<br />
m m<br />
dω<br />
= J + Kω<br />
− Pm ;<br />
dt<br />
( i s<br />
ψ −i<br />
ψ )<br />
m = j<br />
;<br />
s<br />
s<br />
s<br />
r<br />
sr<br />
s<br />
s<br />
s<br />
r<br />
r<br />
dϑ = ω .<br />
dt<br />
Neregularne transformacije izbacuju nulte komponente, kojih kod električnih mašina<br />
obično nema.<br />
Rasprezanjem (bez nultih komponenti) se npr. kod trofaznih asinhronih mašina matrice<br />
induktivnosti dimenzija (3x3) svode na (2x2). Još je veći efekt kod kaveznih asinhronih<br />
mašina, pošto se broj faza rotora svodi na 2.<br />
sr<br />
i<br />
r<br />
;<br />
1.4.2 Transformacija rotacije G<br />
Ovom transformacijom se izbacuje ugao ϑ iz transformisane matrice induktivnosti.<br />
E<br />
L = G<br />
+<br />
L G ,<br />
gde je<br />
⎡G<br />
⎢<br />
⎣<br />
⎡τ<br />
⎤<br />
= ⎢ τ<br />
τ<br />
⎥ ,<br />
⎣ ⎦<br />
jϑ<br />
G = e .<br />
*<br />
E +<br />
s<br />
L =<br />
+<br />
G<br />
r<br />
⎤ ⎡L<br />
⎥ ⎢<br />
⎦ ⎣L<br />
F<br />
ss<br />
F<br />
rs<br />
L<br />
L<br />
F<br />
sr<br />
F<br />
rr<br />
⎤ ⎡G<br />
⎥ ⎢<br />
⎦ ⎣<br />
s<br />
G<br />
r<br />
⎤<br />
⎥<br />
⎦<br />
gde je:<br />
jϑ<br />
= s<br />
jϑ<br />
⎡e<br />
⎤<br />
G<br />
s ⎢ ⎥ ,<br />
⎣<br />
− jϑ<br />
⎥<br />
e<br />
= r<br />
⎡e<br />
⎤<br />
G<br />
r ⎢<br />
s<br />
⎦ ⎣<br />
− jϑ<br />
e<br />
r<br />
⎦<br />
ϑs<br />
i ϑr<br />
su proizvoljni uglovi, ali<br />
ϑ ϑ = ϑ<br />
s<br />
− r<br />
Brzinu referentne ose označavamo sa ω<br />
s<br />
, brzinu obrtanja rotora sa ω , a kružnu učestanost<br />
višefaznog naizmeničnog spoljnog električnog sistema za koji je mašina vezana sa ω<br />
e<br />
(npr. statorska učestanost kod asinhronog motora).<br />
19
Koordinatni sistem može biti vezan za:<br />
ROTOR ϑ ϑ , ϑ = ( ϑ −ϑ<br />
= ϑ)<br />
s<br />
=<br />
r<br />
0<br />
s r<br />
STATOR ϑ −ϑ<br />
, ϑ = 0<br />
r<br />
=<br />
s<br />
t<br />
dω<br />
e<br />
OBRTNO POLJE ϑs = ϑe<br />
, ⇒ϑr<br />
= ϑe<br />
−ϑ<br />
gde je = 0 ⇒ ϑe<br />
= ∫ω<br />
edt<br />
+ ϑ0<br />
dt<br />
Kod asinhronih mašina zbog klizanja je praktičnije da se uzme ϑ = ϑ .<br />
[ :]<br />
E za ϑ ϑ ⇒ ϑ = 0<br />
⎡<br />
⎢L<br />
E<br />
L = ⎢<br />
⎢<br />
⎢L<br />
⎣<br />
ss<br />
sr<br />
s<br />
=<br />
r<br />
⎡1<br />
⎢<br />
⎣0<br />
⎡1<br />
⎢<br />
⎣0<br />
0⎤<br />
1<br />
⎥<br />
⎦<br />
0⎤<br />
1<br />
⎥<br />
⎦<br />
L<br />
L<br />
sr<br />
rr<br />
⎡1<br />
⎢<br />
⎣0<br />
⎡1<br />
⎢<br />
⎣0<br />
0⎤⎤<br />
⎡<br />
⎥⎥<br />
⎢∆L<br />
1⎦⎥<br />
+ ⎢<br />
0⎤⎥<br />
⎢<br />
⎥⎥<br />
⎢∆L<br />
1⎦⎦<br />
⎣<br />
ss<br />
sr<br />
⎡0<br />
⎢<br />
⎣1<br />
⎡0<br />
⎢<br />
⎣1<br />
1⎤<br />
0<br />
⎥<br />
⎦<br />
1⎤<br />
0<br />
⎥<br />
⎦<br />
Kod asinhrone mašine se može vršiti i drugačiji izbor, jer nema isturene polove.<br />
Induktivnosti ne zavise više od vremena, ali se menja oblik jednačine napona u kojoj se<br />
javlja dinamički član.<br />
∆L<br />
∆L<br />
sr<br />
rr<br />
⎡0<br />
⎢<br />
⎣1<br />
⎡0<br />
⎢<br />
⎣1<br />
1⎤⎤<br />
⎥<br />
0<br />
⎥<br />
⎦⎥<br />
1⎤⎥<br />
0<br />
⎥⎥<br />
⎦⎦<br />
s<br />
0<br />
e<br />
F<br />
E<br />
ψ = G ψ ,<br />
E=FG<br />
F E<br />
i =G i<br />
,<br />
F<br />
E<br />
u = G u .<br />
d F<br />
F F F<br />
ψ<br />
u = R i + ;s<br />
dt<br />
E<br />
G u<br />
F E<br />
d ( G ψ)<br />
= R G i + / ⋅G<br />
d t<br />
E<br />
+<br />
;<br />
G<br />
+<br />
E<br />
G u<br />
E F E<br />
E<br />
+<br />
+ d ψ + dG<br />
= u = G R G i + G G + G ψ ,<br />
dt<br />
dt<br />
E<br />
G<br />
+<br />
dϑ<br />
dG<br />
E<br />
dϑ<br />
E<br />
E<br />
ψ = Y ψ = ω Y ψ , gde je<br />
dt<br />
dϑ<br />
d t<br />
+ dG<br />
Y = G .<br />
dϑ<br />
ω ⎡ ⎤<br />
E području: = s<br />
1 0 ω − ω ⎡1<br />
0⎤<br />
Y<br />
s<br />
j<br />
ω<br />
⎢ ⎥ , Y = s<br />
r<br />
j<br />
⎣0<br />
−1<br />
⎢ ⎥ ,<br />
⎦ ω ⎣0<br />
−1<br />
⎦<br />
U [ :]<br />
ω ⎡ − ⎤<br />
u [ B :]<br />
području: = s<br />
0 1 ω −ω<br />
⎡0<br />
−1⎤<br />
Y<br />
s<br />
ω<br />
⎢ ⎥ , Y = s<br />
s<br />
⎣1<br />
0<br />
⎢ ⎥ .<br />
⎦ ω ⎣1<br />
0 ⎦<br />
U Er i Br - transformaciji referentna osa je vezana za rotor, pa je njena brzina ω s<br />
= ω ,<br />
a u Es i Bs - transformaciji za stator, pa je ω = 0 .<br />
s<br />
20
Konačno imamo:<br />
E<br />
E E E<br />
d ψ<br />
E<br />
u = R i + + ω Y ψ .<br />
d t<br />
Na sličan način se dolazi do jednačine za moment.<br />
Sistem vezan za rotor:<br />
[ Er :]<br />
u<br />
dψ s<br />
s = Rs<br />
is<br />
+ +<br />
d<br />
t<br />
jωψ<br />
;<br />
s<br />
u<br />
r<br />
dψ<br />
r<br />
= Rr<br />
ir<br />
+ ;<br />
d t<br />
ψ = L i + L i + ∆L<br />
i + ∆L<br />
i ;<br />
s<br />
r<br />
s<br />
sr<br />
s<br />
s<br />
sr<br />
r<br />
r<br />
ψ = L i + L i + ∆L<br />
i + ∆L<br />
i ;<br />
m m<br />
r<br />
s<br />
sr<br />
dω<br />
= J + Kω<br />
− Pm ;<br />
dt<br />
( i s<br />
ψ −i<br />
ψ )<br />
m = j<br />
;<br />
dϑ = ω .<br />
dt<br />
s<br />
s<br />
Univerzalni matematički model asinhrone mašine<br />
s<br />
Asinhrona mašina nema isturene polove pa se članovi sa<br />
za ukupni fluks statora i rotora.<br />
[ E :]<br />
u<br />
dψ s<br />
s = Rs<br />
is<br />
+ +<br />
d<br />
t<br />
s<br />
s<br />
s<br />
jω<br />
ψ ;<br />
s<br />
sr<br />
r<br />
r<br />
r<br />
ϑ −ϑ<br />
= ϑ ⇒ ω −ω<br />
= ω<br />
s r<br />
s r<br />
.<br />
∆ L se ne pojavljuju u izrazima<br />
u<br />
r<br />
dψ<br />
d t<br />
ω<br />
ω ψ<br />
r<br />
= Rr<br />
ir<br />
+ + j(<br />
s<br />
− )<br />
r<br />
;<br />
ψ = L i + L i ;<br />
s<br />
r<br />
s<br />
sr<br />
s<br />
s<br />
sr<br />
ψ = L i + L i ;<br />
m m<br />
dω<br />
= J + Kω<br />
− Pm ;<br />
dt<br />
( i s<br />
ψ −i<br />
ψ )<br />
m = j<br />
;<br />
dϑ = ω .<br />
dt<br />
Za ω = 0 sistem je vezan za stator.<br />
s<br />
s<br />
r<br />
s<br />
r<br />
r<br />
s<br />
21
Različiti oblici prikaza elektromagnetskog momenata su:<br />
• preko statorskih veličina m = j ( i s<br />
ψ<br />
s<br />
−is<br />
ψ<br />
s<br />
) ,<br />
• preko rotorskih veličina m j ( ψ<br />
r<br />
ir<br />
−ψ<br />
r<br />
ir<br />
)<br />
• preko struja m = j L ( i i −i<br />
i ) ,<br />
sr<br />
s<br />
r<br />
= ,<br />
s<br />
r<br />
L<br />
=<br />
r s r s<br />
,<br />
L<br />
sr<br />
• preko struje rotora i ukupnog fluksa statora m j ( i ψ −i<br />
ψ )<br />
L<br />
=<br />
s r s r<br />
- ovaj oblik se<br />
Lr<br />
najčešće koristi, zato što je rotor asinhrone mašine u kratkom spoju.<br />
sr<br />
• preko struje statora i ukupnog fluksa rotora m j ( i ψ −i<br />
ψ )<br />
s<br />
1.4.3 Realne transformacije<br />
Prelazak sa kompleksne na realne transformacije vrši se matricom H .<br />
1 ⎡1<br />
j⎤<br />
+ 1 ⎡ 1 1⎤<br />
H = ⎢ ⎥ , H =<br />
2 ⎣1<br />
− j<br />
⎢ ⎥ .<br />
⎦ 2 ⎣−<br />
j j ⎦<br />
C=F H<br />
C<br />
L = C<br />
+<br />
L C<br />
1.4.3.1 Realna transformacija rasprezanja C<br />
C=<br />
⎡ 1<br />
⎢ 2π<br />
⎢<br />
cos<br />
q<br />
⎢<br />
⎢<br />
2π<br />
cos 2<br />
2 ⎢ q<br />
q<br />
⎢ :<br />
⎢ 2π<br />
⎢cos 2<br />
⎢ q<br />
⎢ 2π<br />
⎢<br />
cos<br />
⎣ q<br />
0 ⎤<br />
2π<br />
⎥<br />
sin<br />
q ⎥<br />
⎥<br />
2π<br />
sin 2 ⎥<br />
q ⎥<br />
: ⎥<br />
2π<br />
⎥<br />
− sin 2 ⎥<br />
q ⎥<br />
2π<br />
⎥<br />
− sin<br />
q ⎥<br />
⎦<br />
1.4.3.2 Realna transformacija rotacije D<br />
⎡cosϑs<br />
− sinϑs<br />
⎤ ⎡cosϑr<br />
− sinϑr<br />
⎤<br />
D<br />
s<br />
= ⎢<br />
⎥ , D<br />
r<br />
=<br />
⎣sinϑs<br />
cosϑ<br />
⎢<br />
⎥ gde je ϑ<br />
s ⎦ ⎣sinϑr<br />
cosϑ<br />
s<br />
−ϑ<br />
r<br />
= ϑ<br />
r ⎦<br />
22
1.4.3.3 Blondelova transformacija B<br />
⎡<br />
⎢L<br />
B<br />
L = ⎢<br />
⎢<br />
⎢L<br />
⎣<br />
=<br />
ss<br />
sr<br />
⎡⎡L<br />
⎢⎢<br />
⎢⎣<br />
0<br />
⎢⎡M<br />
⎢⎢<br />
⎢⎣<br />
⎣ 0<br />
⎡1<br />
⎢<br />
⎣0<br />
⎡1<br />
⎢<br />
⎣0<br />
sd<br />
d<br />
0⎤<br />
1<br />
⎥<br />
⎦<br />
0⎤<br />
1<br />
⎥<br />
⎦<br />
0 ⎤<br />
L<br />
⎥<br />
sq ⎦<br />
0 ⎤<br />
M<br />
⎥<br />
q ⎦<br />
L<br />
L<br />
sr<br />
rr<br />
⎡1<br />
⎢<br />
⎣0<br />
⎡1<br />
⎢<br />
⎣0<br />
⎡M<br />
⎢<br />
⎣ 0<br />
⎡L<br />
⎢<br />
⎣ 0<br />
d<br />
rd<br />
0⎤⎤<br />
⎡<br />
⎥⎥<br />
⎢∆L<br />
1⎦⎥<br />
+ ⎢<br />
0⎤⎥<br />
⎢<br />
⎥⎥<br />
⎢∆L<br />
1⎦⎦<br />
⎣<br />
0 ⎤⎤<br />
⎥<br />
M<br />
⎥<br />
q ⎦⎥<br />
0 ⎤⎥<br />
⎥⎥<br />
L<br />
rq ⎦⎥⎦<br />
ss<br />
sr<br />
⎡1<br />
⎢<br />
⎣0<br />
⎡1<br />
⎢<br />
⎣0<br />
0⎤<br />
−1<br />
⎥<br />
⎦<br />
0⎤<br />
−1<br />
⎥<br />
⎦<br />
∆L<br />
∆L<br />
sr<br />
rr<br />
⎡1<br />
⎢<br />
⎣0<br />
⎡1<br />
⎢<br />
⎣0<br />
0⎤⎤<br />
⎥<br />
−1<br />
⎥<br />
⎦⎥<br />
=<br />
0⎤⎥<br />
⎥⎥<br />
−1⎦⎦<br />
gde je:<br />
L<br />
sd<br />
L<br />
L<br />
L<br />
= L L ,<br />
=<br />
ss<br />
+ ∆<br />
ss<br />
,<br />
rd rr<br />
+ ∆<br />
rr<br />
L<br />
L<br />
L<br />
L<br />
= L L ,<br />
sq<br />
=<br />
ss<br />
− ∆<br />
ss<br />
,<br />
rq rr<br />
− ∆<br />
rr<br />
M<br />
L<br />
L<br />
M<br />
= L L .<br />
d<br />
=<br />
sr<br />
+ ∆<br />
sr<br />
,<br />
q sr<br />
− ∆<br />
sr<br />
Ako mašina nema isturene polove (npr. asinhrona mašina), može se vršiti proizvoljan<br />
izbor osa.<br />
d − q jednačine, ϑ ϑ ϑ = 0<br />
[ Br :]<br />
u<br />
s<br />
=<br />
r<br />
dψ sd<br />
sd = Rs<br />
isd<br />
+ − ω<br />
d<br />
t<br />
ψ<br />
sq<br />
dψ<br />
sq<br />
1<br />
u<br />
sq<br />
= Rs<br />
isq<br />
+ + ωψ<br />
sd<br />
⇒ us<br />
=<br />
sd<br />
+<br />
dt<br />
2<br />
u<br />
rd<br />
dψ<br />
rd<br />
= Rr<br />
ird<br />
+ ;<br />
dt<br />
;<br />
( u j u )<br />
sq<br />
;<br />
u<br />
rq<br />
dψ<br />
rq<br />
= Rr<br />
irq<br />
+ ;<br />
dt<br />
ψ = L i + M i ;<br />
sd<br />
sq<br />
sd<br />
sq<br />
sd<br />
sq<br />
q<br />
d<br />
rd<br />
ψ = L i + M i ;<br />
rd<br />
d<br />
sd<br />
rd<br />
rq<br />
ψ = M i + L i ;<br />
rq<br />
q<br />
sq<br />
rq<br />
rd<br />
ψ = M i + L i ;<br />
m m<br />
rq<br />
dω<br />
= J + Kω<br />
− Pm ;<br />
dt<br />
m = i sq<br />
ψ − i ψ i druge kombinacije;<br />
sd<br />
sd<br />
sq<br />
dϑ = ω .<br />
dt<br />
23
[ B :]<br />
u<br />
sd<br />
dψ =<br />
sd<br />
Rs<br />
isd<br />
+ − ω<br />
d<br />
t<br />
ψ<br />
sq<br />
;<br />
u<br />
sq<br />
dψ sq<br />
= Rs<br />
isq<br />
+ + ω<br />
d<br />
t<br />
ψ<br />
sd<br />
;<br />
u<br />
u<br />
rd<br />
rq<br />
dψ<br />
rd<br />
= Rr<br />
ird<br />
− ( ωs<br />
−ω)<br />
;<br />
dt<br />
dψ<br />
rq<br />
= Rr<br />
irq<br />
+ ( ω<br />
s<br />
− ω)<br />
;<br />
dt<br />
ψ = L i + M i ;<br />
sd<br />
sq<br />
sd<br />
sq<br />
sd<br />
sq<br />
q<br />
d<br />
rd<br />
ψ = L i + M i ;<br />
rd<br />
d<br />
sd<br />
rd<br />
rq<br />
ψ = M i + L i ;<br />
rq<br />
q<br />
sq<br />
rq<br />
rd<br />
ψ = M i + L i ;<br />
m m<br />
rq<br />
dω<br />
= J + Kω<br />
− Pm ;<br />
dt<br />
m = i sq<br />
ψ − i ψ i druge kombinacije;<br />
dϑ = ω .<br />
dt<br />
sd<br />
sd<br />
sq<br />
ORIGINALNO PODRUČJE<br />
F<br />
C<br />
F područje<br />
(+, -)<br />
H<br />
C područje<br />
(α, β)<br />
E<br />
G<br />
D<br />
B<br />
E područje<br />
(f, b)<br />
kompleksne<br />
H<br />
B područje<br />
(d, q)<br />
realne<br />
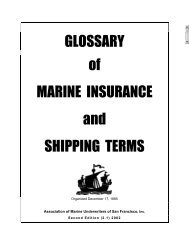
Slika 1-5 Prikaz transformacija<br />
24
Tok uvođenja transformacija:<br />
F (kompleksna, rasprezanje) uveo Forteskju 1918.,<br />
D uveo Blondel (Park) 1933.<br />
C (realna, rasprezanje) uvela Edika Klark 1943.<br />
Transformacije su objedinili Vajt i Vudson 1959.<br />
Legenda oznaka:<br />
E područje: f - napred (forward), b - nazad (backward),<br />
B područje: d - podužno (direct), q - poprečno (quadrature).<br />
1.4.4 Transformacije za trofaznu električnu mašinu<br />
(sa nultim elementima)<br />
⎡ 1 1 1⎤<br />
1<br />
F =<br />
⎢ ⎥<br />
⎢<br />
α α 1<br />
⎥<br />
,<br />
3<br />
⎢⎣<br />
α α 1⎥⎦<br />
C =<br />
⎡<br />
⎢ 1<br />
⎢<br />
2 ⎢ 1<br />
⎢<br />
−<br />
3 2<br />
⎢<br />
⎢ 1<br />
−<br />
⎢⎣<br />
2<br />
0<br />
3<br />
2<br />
3<br />
−<br />
2<br />
1 ⎤<br />
⎥<br />
2<br />
⎥<br />
1 ⎥<br />
2 ⎥<br />
⎥<br />
1 ⎥<br />
2 ⎥⎦<br />
⎡τ<br />
z<br />
j z<br />
G<br />
z<br />
=<br />
⎢<br />
τ<br />
⎥<br />
z<br />
, τ<br />
z<br />
= e ϑ ,<br />
⎢<br />
⎢⎣<br />
⎤<br />
⎥<br />
1⎥⎦<br />
D<br />
z<br />
⎡cosϑz<br />
=<br />
⎢<br />
⎢<br />
sinϑz<br />
⎢⎣<br />
0<br />
− sinϑ<br />
cosϑ<br />
0<br />
z<br />
z<br />
0⎤<br />
0<br />
⎥<br />
⎥<br />
1⎥⎦<br />
⎡ τ<br />
z<br />
τ<br />
z<br />
1⎤<br />
1<br />
E =<br />
⎢<br />
⎥<br />
z<br />
τ<br />
⎢<br />
zα<br />
τ<br />
zα<br />
1<br />
3<br />
⎥<br />
,<br />
⎢⎣<br />
τ α τ α 1⎥<br />
z z ⎦<br />
B z<br />
=<br />
⎡<br />
⎢ cosϑz<br />
⎢<br />
2 ⎢ ⎛ 2π<br />
⎞<br />
cos⎜ϑz<br />
− ⎟<br />
3 ⎢ ⎝ 3 ⎠<br />
⎢<br />
⎢<br />
⎛ 4π<br />
⎞<br />
cos⎜ϑz<br />
− ⎟<br />
⎢⎣<br />
⎝ 3 ⎠<br />
− sinϑ<br />
⎛<br />
− sin⎜ϑz<br />
−<br />
⎝<br />
⎛<br />
− sin⎜ϑz<br />
−<br />
⎝<br />
z<br />
2π<br />
⎞<br />
⎟<br />
3 ⎠<br />
4π<br />
⎞<br />
⎟<br />
3 ⎠<br />
1 ⎤<br />
⎥<br />
2 ⎥<br />
1 ⎥<br />
2 ⎥<br />
1<br />
⎥<br />
⎥<br />
2 ⎥⎦<br />
statorske promenljive:<br />
z = s<br />
rotorske promenljive:<br />
z = r<br />
⎡1<br />
j 1 ⎤<br />
1<br />
H =<br />
⎢ ⎥<br />
⎢<br />
1 − j 1<br />
⎥<br />
,<br />
2<br />
⎢⎣<br />
0 0 2⎥⎦<br />
Y =<br />
⎡0<br />
⎢<br />
⎢<br />
1<br />
⎢⎣<br />
0<br />
−1<br />
0<br />
0<br />
0⎤<br />
0<br />
⎥<br />
⎥<br />
0⎥⎦<br />
25
1.5 Sinhrone mašine<br />
Sinhrona mašina u opštem slučaju ima tri namotaja: namotaj pobude (induktora) na rotoru,<br />
namotaj indukta na statoru i prigušni namotaj na rotoru. Zbog isturenih polova, kod<br />
sinhrone mašine koordinatni sistem se obično vezuje za rotor, tako da se koristi<br />
Br transformacija.<br />
Pobuda deluje samo na d osu. Višefazni prigušni namotaj se primenom C (Klarkove)<br />
transformacije svodi (raspreže) na dvofazni.<br />
U ovom slučaju važi jednačina naponske ravnoteže zapisana u matričnom obliku:<br />
⎡u<br />
⎢<br />
⎢<br />
u<br />
⎢u<br />
⎢<br />
⎢u<br />
⎢<br />
⎣u<br />
d<br />
q<br />
f<br />
D<br />
Q<br />
⎤ ⎡Rs<br />
⎥ ⎢<br />
⎥ ⎢<br />
0<br />
⎥ = ⎢ 0<br />
⎥ ⎢<br />
⎥ ⎢ 0<br />
⎥ ⎢<br />
⎦ ⎣ 0<br />
0<br />
R<br />
0<br />
0<br />
0<br />
s<br />
0<br />
0<br />
R<br />
0<br />
0<br />
f<br />
0<br />
0<br />
0<br />
R<br />
0<br />
D<br />
0 ⎤ ⎡id<br />
⎤<br />
0<br />
⎥ ⎢ ⎥<br />
⎥ ⎢<br />
iq<br />
⎥<br />
0 ⎥ ⎢i<br />
⎥<br />
f +<br />
⎥ ⎢ ⎥<br />
0 ⎥ ⎢iD<br />
⎥<br />
R ⎥ ⎢ ⎥<br />
Q ⎦ ⎣iQ<br />
⎦<br />
d<br />
dt<br />
⎡ψ<br />
d ⎤ ⎡0<br />
⎢ ⎥ ⎢<br />
⎢<br />
ψ<br />
q<br />
⎥ ⎢<br />
1<br />
⎢ψ<br />
⎥<br />
f + ω ⎢0<br />
⎢ ⎥ ⎢<br />
⎢ψ<br />
D ⎥ ⎢0<br />
⎢ ⎥<br />
⎣ψ<br />
⎦<br />
⎢<br />
Q ⎣0<br />
−1<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0⎤<br />
⎡ψ<br />
d ⎤<br />
⎢ ⎥<br />
0<br />
⎥<br />
⎢<br />
ψ<br />
q<br />
⎥ ⎥<br />
0⎥<br />
⎢ψ<br />
⎥<br />
f<br />
⎥ ⎢ ⎥<br />
0⎥<br />
⎢ψ<br />
D ⎥<br />
0⎥<br />
⎦<br />
⎢ ⎥<br />
⎣ψ<br />
Q ⎦<br />
gde pojedini indeksi označavaju: d i q statorske veličine, f veličine jednofaznog<br />
pobudnog namotaja, a D i Q veličine raspregnutog prigušnog namotaja.<br />
Matrična relacija za fluksne obuhvate glasi:<br />
⎡ψ<br />
d ⎤ ⎡ Ld<br />
0 M<br />
fd<br />
M<br />
⎢<br />
ψ<br />
⎥ ⎢<br />
⎢<br />
q<br />
⎥ ⎢<br />
0 Lq<br />
0 0<br />
⎢ψ<br />
⎥ = ⎢<br />
f<br />
M<br />
fd<br />
0 L<br />
f<br />
M<br />
⎢ ⎥ ⎢<br />
⎢ψ<br />
D ⎥ ⎢M<br />
dD<br />
0 M<br />
fD<br />
L<br />
⎢ ⎥ ⎢<br />
⎣ψ<br />
Q ⎦ ⎣ 0 M<br />
qQ<br />
0 0<br />
Sada je matrica induktivnosti:<br />
dD<br />
fD<br />
D<br />
M<br />
0<br />
0<br />
0<br />
L<br />
qQ<br />
Q<br />
⎤⎡i<br />
⎥⎢<br />
⎥⎢<br />
i<br />
⎥⎢i<br />
⎥⎢<br />
⎥⎢i<br />
⎥⎢<br />
⎦⎣i<br />
d<br />
q<br />
f<br />
D<br />
Q<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
Br<br />
L<br />
⎡ Ld<br />
⎢<br />
⎢<br />
0<br />
= ⎢M<br />
⎢<br />
⎢M<br />
⎢<br />
⎣ 0<br />
fd<br />
dD<br />
M<br />
0<br />
L<br />
q<br />
0<br />
0<br />
qQ<br />
M<br />
M<br />
0<br />
L<br />
f<br />
0<br />
fd<br />
fD<br />
M<br />
M<br />
0<br />
L<br />
dD<br />
fD<br />
D<br />
0<br />
M<br />
0<br />
0<br />
0<br />
L<br />
qQ<br />
Q<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
Nema međinduktivnosti između bilo kojih d i q osa. Ose f , d i D , odnosno q i Q se<br />
poklapaju.<br />
1.5.1 Transfomacija nivoa T<br />
Matrica T je dijagonalna, transpozicijom se ne menja. Primenom transformacije nivoa<br />
(svođenjem navojaka) se ne menjaju snage i momenti. Kod sinhrone mašine se obično<br />
primenjuje Ts transformacija, tj. veličine se svode na broja navojaka statorskog namotaja.<br />
26
U matrici induktivnosti imamo različite vrednosti međuinduktivnosti. Uvođenjem navojne<br />
Ts transformacije dobijamo samo dve vrednosti međuinduktivnosti M<br />
d<br />
i M<br />
q<br />
. Dakle,<br />
transformacija nivoa se zasniva na principu jednakih induktivnosti.<br />
Matrica transformacije<br />
gde su i<br />
BrTs<br />
L = T<br />
Br<br />
+<br />
s<br />
L T s<br />
T<br />
s<br />
ima oblik:<br />
M<br />
fd<br />
M<br />
qQ<br />
M<br />
q<br />
= , tj. usvojen je odnos<br />
M<br />
M<br />
fD<br />
T s<br />
⎡ M<br />
d<br />
M<br />
d<br />
= diag ⎢1,<br />
1, , ,<br />
⎢⎣<br />
M<br />
fd<br />
M<br />
dD<br />
M<br />
M<br />
d q<br />
= .<br />
dD<br />
M<br />
qQ<br />
M<br />
M<br />
q<br />
qQ<br />
⎤<br />
⎥<br />
⎥⎦<br />
BrTs<br />
L<br />
⎡ Ld<br />
⎢<br />
⎢<br />
0<br />
= ⎢M<br />
⎢<br />
⎢M<br />
⎢<br />
⎣ 0<br />
d<br />
d<br />
0<br />
L<br />
M<br />
q<br />
0<br />
0<br />
q<br />
M<br />
0<br />
L′<br />
M<br />
f<br />
0<br />
d<br />
d<br />
M<br />
0<br />
d<br />
M<br />
L′<br />
d<br />
D<br />
0<br />
0<br />
M<br />
0<br />
0<br />
L′<br />
Q<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
q<br />
gde su:<br />
2<br />
2<br />
⎛ ⎞<br />
⎜<br />
M<br />
⎛<br />
d ⎟<br />
M ⎞ ⎛ M ⎞<br />
d<br />
q<br />
L ′<br />
f<br />
= L<br />
f<br />
, L ′ =<br />
⎝ M<br />
⎜<br />
⎟<br />
D<br />
LD<br />
i L ′ ⎜ ⎟<br />
Q<br />
= LQ<br />
.<br />
fd ⎠ ⎝ M<br />
dD ⎠ ⎝ M<br />
qQ ⎠<br />
Uvođenje navojne Ts transformacije omogućuje da se induktivnost L namotaja prikaže<br />
kao zbir odgovarajuće međuinduktivnosti M i rasipne induktivnosti Λ tako da je:<br />
L<br />
L<br />
d<br />
q<br />
L′<br />
f<br />
L′<br />
D<br />
L′<br />
Q<br />
= M<br />
= M<br />
= M<br />
= M<br />
d<br />
q<br />
= M<br />
d<br />
d<br />
q<br />
+ Λ<br />
+ Λ<br />
d<br />
q<br />
+ Λ′<br />
+ Λ′<br />
f<br />
+ Λ′<br />
D<br />
Q<br />
Sledstveno rečenom ukupan fluks se može prikazati kao zbir zajedničkog fluksa (fluksa<br />
magnećenja) i rasipnog fluksa namotaja.<br />
Matrica otpornosti nakon primene navojne Ts transformacije je:<br />
⎡Rs<br />
0 0 0 0 ⎤<br />
⎢<br />
⎥<br />
⎢<br />
0 Rs<br />
0 0 0<br />
⎥<br />
= + Br<br />
R T = ⎢ ′ ⎥<br />
s<br />
R T 0 0 R<br />
s<br />
f<br />
0 0 , gde je R<br />
D<br />
= RQ<br />
.<br />
⎢<br />
⎥<br />
⎢ 0 0 0 R′<br />
D<br />
0 ⎥<br />
⎢<br />
⎥<br />
⎣ 0 0 0 0 R′<br />
Q ⎦<br />
BrTs<br />
2<br />
27
Za pojedine vektore i , ψ i u važi:<br />
⎡ id<br />
⎤<br />
⎢ ⎥<br />
⎢<br />
iq<br />
⎥<br />
⎢ M<br />
fd ⎥<br />
⎢i<br />
f<br />
M<br />
⎥<br />
⎢<br />
d<br />
i = ⎥ ,<br />
⎢ M<br />
dD<br />
i ⎥<br />
D<br />
⎢ M ⎥<br />
d<br />
⎢<br />
M<br />
⎥<br />
⎢<br />
qQ<br />
i ⎥<br />
Q<br />
⎢<br />
⎣ M ⎥<br />
q ⎦<br />
⎡ ψ<br />
d ⎤<br />
⎢<br />
ψ<br />
⎥<br />
⎢<br />
q<br />
⎥<br />
⎢ M<br />
d ⎥<br />
⎢<br />
ψ<br />
f<br />
M ⎥<br />
fd<br />
ψ = ⎢ ⎥ i<br />
⎢ M<br />
d<br />
ψ ⎥<br />
D<br />
⎢ M ⎥<br />
dD<br />
⎢<br />
M<br />
⎥<br />
⎢<br />
q<br />
ψ ⎥<br />
Q<br />
⎢<br />
⎣ M ⎥<br />
qQ ⎦<br />
⎡<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
u<br />
u = ⎢<br />
⎢u<br />
⎢<br />
⎢<br />
⎢u<br />
⎢<br />
⎣<br />
f<br />
D<br />
Q<br />
u<br />
d<br />
uq<br />
M<br />
M<br />
M<br />
M<br />
M<br />
M<br />
d<br />
fd<br />
d<br />
dD<br />
q<br />
qQ<br />
⎤<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
1.5.2 Matematički model sinhrone mašine u BrTs području<br />
S obzirom na smer struja, jednačine su napisane za motorski režim rada. Da bi se model<br />
prilagodio generatorskom režimu rada, potrebno je promeniti predznak statorskih struja<br />
( id<br />
− id<br />
→ i iq<br />
→ − iq<br />
).<br />
Jednačine naponske ravnoteže:<br />
[ BrTs :]<br />
u<br />
dψ<br />
d<br />
d = Rs<br />
id<br />
+<br />
d<br />
t<br />
− ωψ ;<br />
q<br />
u<br />
u<br />
q<br />
f<br />
dψ q<br />
= Rs<br />
iq<br />
+ +<br />
d<br />
dψ<br />
f<br />
= R<br />
f<br />
i<br />
f<br />
+ ;<br />
dt<br />
t<br />
ωψ<br />
d<br />
;<br />
gde je<br />
R = R<br />
Q<br />
dψ<br />
D<br />
0= u<br />
D<br />
= RD<br />
iD<br />
+ ;<br />
dt<br />
dψ<br />
Q<br />
0= uQ<br />
= RQ<br />
iQ<br />
+ ;<br />
dt<br />
D<br />
. Naponi na prigušnom namotaju jednaki su nuli jer je on kratko spojen<br />
Jednačine za fluksne obuhvate izražene preko samoinduktivnosti L :<br />
ψ = L i + M i + M i ;<br />
d<br />
q<br />
d<br />
q<br />
d<br />
ψ = L i + M i ;<br />
f<br />
d<br />
q<br />
ψ = M i + L i + M i ;<br />
d<br />
ψ = M i + M i + L i ;<br />
D<br />
d<br />
ψ = M i + L i ;<br />
Q<br />
q<br />
d<br />
q<br />
d<br />
q<br />
f<br />
Q<br />
d<br />
f<br />
Q<br />
f<br />
Q<br />
f<br />
d<br />
d<br />
D<br />
D<br />
podužni fluks zavisi samo od podužnih struja, a poprečni samo od poprečnih.<br />
D<br />
D<br />
28
m m<br />
m =<br />
dω<br />
= J + Kω<br />
−<br />
dt<br />
i q<br />
ψ − i ψ )<br />
(<br />
d d q<br />
Pm<br />
dϑ<br />
=ω = const<br />
dt<br />
Jednačine za fluksne obuhvate izražene preko rasipnih induktivnosti Λ :<br />
ψ<br />
ψ<br />
d<br />
q<br />
= M<br />
= M<br />
d<br />
q<br />
i<br />
i<br />
md<br />
mq<br />
+ Λ<br />
+ Λ<br />
d<br />
q<br />
i<br />
i<br />
q<br />
d<br />
ψ<br />
f<br />
= M<br />
d<br />
i<br />
md<br />
+ Λ<br />
f<br />
i<br />
f<br />
gde je:<br />
ψ<br />
ψ<br />
D<br />
Q<br />
q<br />
= M<br />
= M<br />
d<br />
d<br />
q<br />
i<br />
i<br />
md<br />
q<br />
+ Λ<br />
+ Λ<br />
Q<br />
Q<br />
D<br />
i<br />
D<br />
Q<br />
Λ = Λ , Λ = Λ ,<br />
i<br />
D<br />
i = i + i + i podužna struja magnećenja,<br />
md<br />
mq<br />
d<br />
q<br />
f<br />
Q<br />
D<br />
i = i + i poprečna struja magnećenja.<br />
Podužni zajednički fluks je:<br />
ψ = M i ,<br />
md<br />
d<br />
md<br />
dok je poprečni zajednički fluks:<br />
ψ<br />
mq<br />
= M<br />
q<br />
i<br />
mq<br />
Jednačine za fluks izražene preko samoinduktivnosti L se koriste za primenu na<br />
računarima, a drugi oblik, preko rasipnih induktivnosti Λ , je dobar za fizičku predstavu.<br />
Drugi oblik se koristi za primenu ra računarima kada se uzima u obzir zasićenje te gubici<br />
usled histereze i vihornih struja.<br />
Matematički model sinhrone mašine se lako pretvara u matematički model asinhrone<br />
mašine - izbaci se pobudni namotaj ( i<br />
f<br />
= 0 ), a budući da asinhrona mašina obično nema<br />
isturene polove vredi: L<br />
d<br />
= Lq<br />
i M<br />
d<br />
= M<br />
q<br />
. Kod asinhronih mašina koriste se veze za<br />
stator, ili još češće za obrtno polje.<br />
1.5.3 Ekvivalentna šema sinhrone mašine<br />
S obzirom da u sinhronoj mašini imamo u opštem slučaju tri namotaja, pogledajmo prvo<br />
ekvivalentnu šemu za tronamotajni transformator.<br />
29
ψ<br />
i1<br />
( 1<br />
)<br />
2<br />
i′ ( ψ 2) ′ i′<br />
3 ( ψ<br />
3′<br />
)<br />
ψ 1 σ<br />
ψ 2σ<br />
ψ 3σ<br />
i′<br />
3<br />
ψ m<br />
Λ 3<br />
i Λ<br />
1 1<br />
Λ 2 i′<br />
2<br />
L<br />
1<br />
( ψ 1<br />
)<br />
M<br />
L′<br />
3<br />
( ψ 3) ′<br />
L′<br />
2<br />
( ψ 2) ′<br />
Slika 1-6 Tronamotajni transformator<br />
Z 0<br />
i 0<br />
u 0<br />
R<br />
Q<br />
= R D<br />
u d<br />
i d<br />
i Q<br />
Λ<br />
=<br />
Q<br />
Λ D<br />
R<br />
i mq<br />
M q<br />
Λ<br />
=<br />
q<br />
Λ d<br />
− ωψ q<br />
ωψ d<br />
R<br />
u q<br />
i q<br />
L q<br />
ω<br />
u′<br />
f<br />
i′<br />
f<br />
R′<br />
f<br />
Λ f<br />
Λ d<br />
Λ D<br />
m<br />
Lf<br />
M<br />
d<br />
LD<br />
RD<br />
i md<br />
i D<br />
Slika 1-7 BrTs šema standardne sinhrone mašine sa isturenim polovima i prigušnim<br />
namotajom, uključujući i nulto kolo<br />
30
1.5.4 Parkove jednačine<br />
Parkove jednačine se dobijaju kada se iz naponskih jednačina sinhrone mašine eliminišu<br />
prigušni namotaji, pošto nisu dostupni, i pobudni namotaj. Ovo se može napraviti samo u<br />
Laplasovom području, a ne u vremenskom.<br />
U ovu svrhu poslužićemo se tzv. Karsonovom modifikaciojom Laplasove transformacije,<br />
gde je, u odnosu na originalnu Laplasovu transformaciju, dodato množenje sa p desne<br />
strane jednačine, da bi transformisane fizičke veličine zadržale svoju prvobitnu fizičku<br />
dimenziju:<br />
() t<br />
−<br />
[ F( p ) − ( 0 )];<br />
∞<br />
− pt ⎡d<br />
f ⎤<br />
L[ f () t ] = F( p) = p∫ f ( t)<br />
e dt<br />
; L⎢<br />
=<br />
d<br />
⎥ p f<br />
0<br />
⎣ t ⎦<br />
lim f t = lim F p ; lim<br />
0<br />
f t lim F p<br />
() ( ) () ( )<br />
t→ ∞<br />
p→0 t→<br />
=<br />
p→∞<br />
.<br />
gde je f ( 0<br />
− ) početna vrednost funkcije.<br />
Za dobijanje transformisane funkcije F( p)<br />
iz zadate vremenske funkcije f (t)<br />
i obrnuto<br />
postoje posebne tablice za funkcije koje se najčešće sreću u praksi.<br />
Naponske jednačine sinhrone mašine napisane u Laplasovom području:<br />
[ L :]<br />
u = R i + p( − Ψ ) −ωψ<br />
, ω const.<br />
gde je:<br />
d<br />
u<br />
u<br />
ψ ;<br />
d d d d q<br />
=<br />
q<br />
f<br />
q<br />
( ψ<br />
q<br />
− Ψq<br />
) + ωψ<br />
d<br />
p( − Ψ )<br />
= R i + p<br />
;<br />
= R i + ψ ;<br />
D<br />
f<br />
f<br />
D<br />
D<br />
f<br />
f<br />
( − Ψ )<br />
0 = u = R i + p ψ ;<br />
Q<br />
Q<br />
Q<br />
D<br />
D<br />
( − Ψ )<br />
0 = u = R i + p ψ ;<br />
d<br />
d<br />
d<br />
Q<br />
Q<br />
( id<br />
− I<br />
d<br />
) + G(<br />
p ( u<br />
f<br />
−U<br />
f<br />
)<br />
( i I )<br />
ψ − Ψ = L ( p)<br />
) ;<br />
ψ − Ψ = L ( p)<br />
− ;<br />
i<br />
f<br />
q<br />
q<br />
q<br />
1<br />
= − p G( p)<br />
id<br />
+ U<br />
f<br />
;<br />
R + pL<br />
U<br />
f<br />
ψ<br />
f<br />
= G ( p)<br />
R<br />
f<br />
id<br />
+ L<br />
f 0<br />
( p)<br />
.<br />
R<br />
d<br />
( 1+<br />
pT ′′<br />
d<br />
)( 1+<br />
pT ′<br />
d<br />
)<br />
( 1+<br />
pT ′′ )( 1+<br />
pT ′ )<br />
do<br />
q<br />
L ( p)<br />
= L<br />
podužna induktivnost,<br />
f<br />
do<br />
q<br />
f<br />
f<br />
q<br />
q<br />
( 1+<br />
pT ′′<br />
qo<br />
)<br />
( 1+<br />
pT ′ )<br />
L ( p)<br />
= L<br />
poprečna induktivnost.<br />
qo<br />
31
Vremenske konstante<br />
kratkog spoja.<br />
pG<br />
T ′ ... T ′′ zavise od konstrukcije mašine i određuju se u ogledu<br />
d<br />
qo<br />
[ p M<br />
d<br />
// ( RD<br />
+ pΛ<br />
D<br />
) ]<br />
Λ ) + [ p M // ( R + pΛ<br />
) ]<br />
( p) = pΛ<br />
+ [ p M // ( R + pΛ<br />
)]<br />
( p)<br />
=<br />
, pL<br />
f 0 f<br />
d D D<br />
( R + p<br />
f<br />
gde je // oznaka za paralelnu vezu.<br />
f<br />
1.5.5 Ustaljeno stanje sinhrone mašine<br />
d<br />
D<br />
D<br />
U ustaljenom (stacionarnom) stanju smatra se da su izvodi svih flukseva jednaki nuli, te da<br />
prigušni namotaj ne deluje.<br />
Jednačine napisane za motorski režim rada su:<br />
u<br />
u<br />
= R −ωψ<br />
,<br />
d<br />
i d<br />
q<br />
i q<br />
d<br />
q<br />
= R + ωψ ,<br />
ψ = L i + M i ,<br />
q<br />
d<br />
q<br />
d<br />
ψ = L i .<br />
q<br />
d<br />
d<br />
f<br />
u<br />
d<br />
= R i<br />
d<br />
−ω<br />
L i<br />
q q<br />
u<br />
q<br />
= Ri +ω L i + ω M i .<br />
q<br />
d<br />
d<br />
d<br />
f<br />
Jednačine napisane za generatorski režim rada, uz zanemarenje aktivne otpornosti<br />
statorskog namotaja ( R =0)<br />
su:<br />
u = X i ,<br />
d<br />
q<br />
q<br />
d<br />
q<br />
u = − X i + ω M i = − X i + X i = − X i + E .<br />
d<br />
d<br />
f<br />
d<br />
d<br />
U indeksu ad , oznaka a je od armature (rotora).<br />
Radi crtanja fazorskog dijagrama preći ćemo u kompleksno područje:<br />
E<br />
B<br />
u = Hu<br />
ad<br />
f<br />
d<br />
d<br />
q<br />
⎡u<br />
⎢<br />
⎣u<br />
f<br />
b<br />
⎤<br />
⎥ =<br />
⎦<br />
1<br />
2<br />
⎡1<br />
⎢<br />
⎣1<br />
−<br />
j⎤<br />
⎡u<br />
⎥ ⎢<br />
j⎦<br />
⎣u<br />
d<br />
q<br />
⎤<br />
⎥ .<br />
⎦<br />
2 u =1⋅u<br />
+ j ⋅u<br />
= jE − jX i + X<br />
d<br />
q<br />
q<br />
d<br />
d<br />
q<br />
i<br />
q<br />
32
q<br />
X q<br />
i q<br />
E q<br />
− X d<br />
i d<br />
u q<br />
δ<br />
2u<br />
u d<br />
d<br />
Slika 1-8 Fazorski dijagram sinhrone mašine u ustaljenom stanju<br />
Analogno se može uraditi sa strujama i fluksevima.<br />
1.6 Asinhrone mašine<br />
Asinhrona mašina ima ravnomerni procep (cilindrično statorsko i rotorsko magnetno<br />
kolo), te su podužne i poprečne komponente jednake. Na statoru je smešten trofazni<br />
namotaj koji je spojen na napajanje. Rotor može takođe biti namotan trofazno, kada je<br />
preko kliznih prstenova vezan za spoljašnje elemente, obično trofazni otpornik, ili mu je<br />
namotaj višefazni kratkospojen, sa onoliko faza koliko ima provodnih štapova.<br />
Koordinatni sistem može da se veže da stator (stacionarni) ili za obrtno polje (sinhroni<br />
koordinatni sistem). Vezom sa rotorom se ništa ne dobija.<br />
1.6.1 Matematički model trofazne asinhrone mašine u originalnom području<br />
dψ<br />
u = R i + ;<br />
dt<br />
ψ = L(ϑ<br />
) i ;<br />
m m<br />
dω<br />
= J + Kω<br />
− Pm ;<br />
dt<br />
1 d L m = i + i ;<br />
2 dϑ<br />
dϑ = ω ;<br />
dt<br />
gde je:<br />
mc<br />
m = ,<br />
P<br />
K<br />
m<br />
K = ,<br />
P<br />
J<br />
m<br />
J = i ω = Pω<br />
m<br />
.<br />
P<br />
33
34<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
+<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
r<br />
s<br />
r<br />
s<br />
rr<br />
ss<br />
r<br />
s<br />
t ψ<br />
ψ<br />
i<br />
i<br />
R<br />
R<br />
u<br />
u<br />
d<br />
d<br />
0<br />
0<br />
;<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎣<br />
⎡<br />
r<br />
s<br />
rr<br />
rs<br />
sr<br />
ss<br />
r<br />
s<br />
i<br />
i<br />
L<br />
L<br />
L<br />
L<br />
ψ<br />
ψ<br />
;<br />
Pm<br />
t<br />
J<br />
m m<br />
−<br />
=<br />
d<br />
dω<br />
; 0<br />
=<br />
K ( obično zanemarujemo trenje )<br />
[ ] ⎥ ⎦ ⎤<br />
⎢<br />
⎣<br />
⎡<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
+<br />
+<br />
r<br />
s<br />
rs<br />
sr<br />
r<br />
s<br />
c<br />
P<br />
m<br />
i<br />
i<br />
L<br />
L<br />
i<br />
i<br />
0<br />
d<br />
d<br />
d<br />
d<br />
0<br />
2<br />
ϑ<br />
ϑ ;<br />
ϑ = ω<br />
dt<br />
d<br />
;<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
c<br />
b<br />
a<br />
s<br />
u<br />
u<br />
u<br />
u ;<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
C<br />
B<br />
A<br />
r<br />
u<br />
u<br />
u<br />
u ;<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
c<br />
b<br />
a<br />
s<br />
i<br />
i<br />
i<br />
i ;<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
C<br />
B<br />
A<br />
r<br />
i<br />
i<br />
i<br />
i ;<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
s<br />
s<br />
s<br />
ss<br />
R<br />
R<br />
R<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
R ;<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
r<br />
r<br />
r<br />
rr<br />
R<br />
R<br />
R<br />
0<br />
0<br />
0<br />
0<br />
0<br />
0<br />
R ;<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
cc<br />
cb<br />
ca<br />
bc<br />
bb<br />
ba<br />
ac<br />
ab<br />
aa<br />
ss<br />
L<br />
L<br />
L<br />
L<br />
L<br />
L<br />
L<br />
L<br />
L<br />
L ,<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
=<br />
CC<br />
CB<br />
CA<br />
BC<br />
BB<br />
BA<br />
AC<br />
AB<br />
AA<br />
rr<br />
L<br />
L<br />
L<br />
L<br />
L<br />
L<br />
L<br />
L<br />
L<br />
L ;<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎥<br />
⎦<br />
⎤<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎢<br />
⎣<br />
⎡<br />
−<br />
+<br />
+<br />
−<br />
−<br />
+<br />
=<br />
= + ϑ<br />
π<br />
ϑ<br />
π<br />
ϑ<br />
π<br />
ϑ<br />
ϑ<br />
π<br />
ϑ<br />
π<br />
ϑ<br />
π<br />
ϑ<br />
ϑ<br />
cos<br />
)<br />
3<br />
2<br />
cos(<br />
)<br />
3<br />
2<br />
cos(<br />
)<br />
3<br />
2<br />
cos(<br />
cos<br />
)<br />
3<br />
2<br />
cos(<br />
)<br />
3<br />
2<br />
cos(<br />
)<br />
3<br />
2<br />
cos(<br />
cos<br />
sr<br />
rs<br />
sr<br />
L<br />
L<br />
L .<br />
1.6.2 Matematički model trofazne asinhrone mašine u kompleksnom obliku<br />
[ ]<br />
:<br />
Eo<br />
s<br />
d<br />
d<br />
ψ<br />
jω<br />
t<br />
ψ<br />
i<br />
R<br />
u<br />
e<br />
s<br />
s<br />
s<br />
s +<br />
+<br />
= ;<br />
( ) r<br />
e<br />
r<br />
r<br />
r<br />
r ψ<br />
ω<br />
ω<br />
j<br />
t<br />
ψ<br />
i<br />
R<br />
u<br />
−<br />
+<br />
+<br />
=<br />
d<br />
d<br />
;<br />
r<br />
sr<br />
s<br />
s<br />
s<br />
i<br />
L<br />
i<br />
L<br />
ψ +<br />
= ;<br />
r<br />
r<br />
s<br />
sr<br />
r<br />
i<br />
L<br />
i<br />
L<br />
ψ +<br />
= ;
m m<br />
dω<br />
= J + Kω<br />
− Pm ;<br />
dt<br />
sr<br />
( i i −i<br />
i )<br />
m = j L<br />
;<br />
s<br />
r<br />
s<br />
r<br />
dϑ = ω .<br />
dt<br />
Pimenom navojne Ts transformacije, tj. sledećih zamena za rotorske veličine:<br />
i T i′<br />
ψ = T<br />
−1 ψ′<br />
, u<br />
r<br />
= T<br />
−1<br />
r<br />
u′<br />
r<br />
r<br />
=<br />
r r<br />
,<br />
r r r<br />
L<br />
L′<br />
sr<br />
r<br />
sr<br />
= , Lr<br />
2<br />
Ts<br />
Tr<br />
Tr<br />
L′<br />
R′<br />
r<br />
= , Rr<br />
=<br />
2<br />
T<br />
i usvajanjem transformacionih formula:<br />
T<br />
s<br />
=1 i T<br />
r<br />
= ns<br />
nr<br />
= Ls<br />
Lr<br />
,<br />
r<br />
dobija se praktičniji EoTs model:<br />
[ EoTs :]<br />
dψ<br />
dt<br />
s<br />
u<br />
s<br />
= Rsis<br />
+ +<br />
jω<br />
e<br />
ψ<br />
s<br />
;<br />
gde je:<br />
dψ′<br />
d t<br />
( ωe<br />
−ω) ψ<br />
r<br />
r<br />
u ′<br />
r<br />
= R′<br />
ri′<br />
r<br />
+ + j ′<br />
ψ = L i + M i ;<br />
s<br />
r<br />
s<br />
ψ ′ = M i + L i′<br />
;<br />
m m<br />
s<br />
s<br />
r<br />
dω<br />
= J + Kω<br />
− Pm ;<br />
dt<br />
sr<br />
( i i′<br />
−i<br />
i )<br />
m = j L ′ ;<br />
s<br />
r<br />
dϑ = ω .<br />
dt<br />
L = M + Λ = L samoinduktivnost,<br />
s<br />
M = L k s sr<br />
zajednička induktivnost,<br />
Λ = L ( 1 − ) ili Λ = L ( − 1−σ<br />
)<br />
s<br />
k sr<br />
L<br />
sr<br />
k<br />
sr<br />
= koeficijent sprege i<br />
L<br />
s<br />
L<br />
r<br />
Konačno, kada se uvede kliznje prema definiciji:<br />
ω<br />
e<br />
−ω<br />
s =<br />
ω<br />
e<br />
r<br />
r<br />
s<br />
r<br />
s<br />
i izbace indeksi T -transformacije, dobija se EoTs model u preglednijoj formi:<br />
35<br />
sr<br />
;<br />
1 rasipna induktivnost,<br />
σ<br />
sr<br />
Lsr<br />
=1−<br />
L L<br />
s<br />
r<br />
koeficijent ukupnog rasipanja.
[ EoTs :]<br />
dψ<br />
dt<br />
s<br />
u<br />
s<br />
= Rsis<br />
+ +<br />
jω<br />
e<br />
ψ<br />
s<br />
;<br />
u<br />
dψ<br />
d t<br />
ω<br />
r<br />
r<br />
= Rrir<br />
+ + j s<br />
e<br />
ψ<br />
r<br />
ψ = L i + M i ;<br />
s<br />
r<br />
s<br />
ψ = M i + L i ;<br />
m m<br />
s<br />
s<br />
r<br />
dω<br />
= J + Kω<br />
− Pm ;<br />
dt<br />
sr<br />
( i i −i<br />
i )<br />
m = j L<br />
;<br />
s<br />
r<br />
r<br />
r<br />
s<br />
r<br />
;<br />
dϑ = ω .<br />
dt<br />
Jednačine za fluksne obuhvate mogu se napisati i u formi sa eksplicitno izraženim<br />
zajedničkim fluksom i rasipanjem:<br />
ψ<br />
ψ<br />
s<br />
r<br />
( is<br />
+ ir<br />
) + Λis<br />
= M iµ + Λis<br />
= ψ<br />
µ<br />
+ λs<br />
= M<br />
,<br />
( is<br />
+ ir<br />
) + Λir<br />
= M iµ + Λ ir<br />
= ψ<br />
µ<br />
+ λr<br />
= M<br />
,<br />
gde je i<br />
µ<br />
= i s<br />
+ ir<br />
struja magnećenja, ψ<br />
µ<br />
= M i zajednički fluks a λ<br />
µ<br />
s<br />
= Λis<br />
i λr<br />
= Λir<br />
statorski i rotorski rasipni fluksevi.<br />
Konačno, dolazi se do sledećeg oblika jednačina:<br />
[ EoTs :]<br />
dψ<br />
dt<br />
s<br />
u<br />
s<br />
= Rsis<br />
+ +<br />
u<br />
ψ<br />
s<br />
ψ<br />
r<br />
dψ<br />
d t<br />
jω<br />
e<br />
ψ<br />
ω<br />
r<br />
r<br />
= Rrir<br />
+ + j s<br />
e<br />
ψ<br />
r<br />
m m<br />
= ψ µ<br />
+ λ ;<br />
= ψ µ<br />
+ λ ;<br />
s<br />
r<br />
dω<br />
= J + Kω<br />
− Pm ;<br />
dt<br />
sr<br />
( i i −i<br />
i )<br />
m = j L<br />
;<br />
dϑ = ω .<br />
dt<br />
s<br />
r<br />
s<br />
r<br />
s<br />
;<br />
;<br />
36
1.6.3 Ekvivalentna šema asinhrone mašine za prelazna stanja<br />
Ekvivalentna šema asinhrone mašine za prelazna stanja pravi se iz realnog modela:<br />
[ BrTs :]<br />
u<br />
sd<br />
= R i<br />
s sd<br />
dψ<br />
+<br />
dt<br />
sd<br />
− ω<br />
dψ<br />
sq<br />
u<br />
sq<br />
= Rsisq<br />
+ + ω<br />
dt<br />
dψ′<br />
d t<br />
e<br />
e<br />
ψ<br />
ψ<br />
sq<br />
sd<br />
;<br />
;<br />
( ωe<br />
−ω) ψ<br />
rq<br />
rd<br />
u ′<br />
rd<br />
= R′<br />
ri′<br />
′<br />
rd<br />
+ −<br />
dψ′<br />
( ωe<br />
−ω) ψ<br />
rd<br />
rq<br />
u ′<br />
rq<br />
= R′<br />
ri′<br />
′<br />
rq<br />
+ +<br />
sd<br />
s<br />
sd<br />
d t<br />
ψ = L i + L′<br />
i ;<br />
sq<br />
s<br />
sq<br />
sr<br />
sr<br />
rd<br />
ψ = L i + L′<br />
i ;<br />
rd<br />
sr<br />
sd<br />
r<br />
rq<br />
ψ ′ = L′<br />
i + L′<br />
i′<br />
;<br />
rd<br />
ψ ′<br />
rq<br />
= L′<br />
sr<br />
isq<br />
+ L′<br />
r<br />
i′<br />
.<br />
rq<br />
Ako se za brzinu referentne ose izabere ω<br />
S<br />
= 0 , tj. ona "pričvrsti" za stator, dobijamo<br />
BsTs model, iz kojeg se crta ekvivalentno kolo (slika 1-9).<br />
Ova šema važi za sva radna stanja, sve oblike napona i svaku nesimetriju. Poprečni<br />
generator pobuđuje podužni fluks i obrnuto. Podužne i poprečne komponente se ne mogu<br />
razdvojiti.<br />
;<br />
;<br />
u sd<br />
isd<br />
R s<br />
Λ s<br />
Λ r<br />
R′<br />
r<br />
i′<br />
rd<br />
u′<br />
rd<br />
L′<br />
sr<br />
ψ ′<br />
rd<br />
ω ψ rq<br />
′<br />
L′<br />
sr<br />
ψ ′<br />
rq<br />
−ω ψ rd<br />
′<br />
u sq<br />
i sq<br />
R s<br />
Λ s<br />
Λ r<br />
R′<br />
r<br />
i′<br />
rq<br />
u′<br />
rq<br />
Slika 1-9 Ekvivalentna šema asinhrone mašine za BsTs model<br />
Λ s<br />
= L s<br />
− M , Λ r<br />
= L r<br />
− M , M = L′<br />
sr<br />
37
Ako se za brzinu referentne ose izabere ω<br />
s<br />
= ω<br />
e<br />
, tj. ona "pričvrsti" za obrtno polje<br />
(sinhrona referentna osa), dobijamo BTs model. Ekvivalentno kolo u ovom modelu<br />
prikazano je na slici 1-10.<br />
u sd<br />
isd<br />
R s<br />
Λ s<br />
Λ r<br />
R′<br />
r<br />
i′<br />
rd<br />
u ′<br />
rd<br />
−ω s<br />
ψ sq<br />
ψ sd<br />
L′<br />
sr<br />
ψ ′<br />
rd<br />
− sω ψ ′<br />
s<br />
rq<br />
ω s ψ sd<br />
ψ sq<br />
L′<br />
sr<br />
ψ ′<br />
rq<br />
sω ψ ′<br />
s<br />
rd<br />
u sq<br />
i sq<br />
R s<br />
Λ s<br />
Λ r<br />
R′<br />
r<br />
i′<br />
rq<br />
u′<br />
rq<br />
Slika 1-10 Ekvivalentna šema asinhrone mašine za BTs model<br />
Praktična vrednost ovakvog izbora je u tome što se - slično kao u primeni Br -<br />
transformacije kod sinhronih mašina dolazi do jednosmernih veličina. Naime, kada se<br />
trofazni naponi transformišu pomoću B matrice uz ϑ = ϑ = ω t dobijaju se naponi:<br />
⎡u<br />
⎢<br />
⎣u<br />
sd<br />
sq<br />
⎤<br />
⎥ =<br />
⎦<br />
⎡cos<br />
β ⎤<br />
3U ⎢ ⎥ ,<br />
⎣sin<br />
β ⎦<br />
dakle veličine koje su u ustaljenom stanju jednosmerne.<br />
z<br />
s<br />
e<br />
1.7 Mašine jednosmerne struje<br />
Motor jednosmerne struje (Direct Current motor) spada u grupu električnih mašina sa dva<br />
namotaja (po jednim na statoru i rotoru). Ove mašine nazivaju se i komutatorskim<br />
mašinama. Elektromotorni pogoni sa motorima jednosmerne struje imaju sledeće<br />
karakteristike:<br />
• jednostavna regulacija brzine obrtanja i mogućnost održavanja konstantne brzine<br />
obrtanja,<br />
• nezavisna regulacija brzine i momenta,<br />
• fleksibilno upravljanje motorom u bilo kom režimu rada,<br />
• veliki polazni moment.<br />
38
1.7.1 Ekvivalentna šema<br />
Na slici 1-11 prikazana je ekvivalentna šema idealizovane mašine za jednosmernu struju<br />
sa nezavisnim pobuđivanjem. Zbog izrazite magnetne nelinearnosti u pobudnom kolu nisu<br />
definisane nikakve induktivnosti, već je data karakteristika magnećenja ψ f<br />
= ψ f<br />
( i f<br />
) , gde<br />
je ψ<br />
f<br />
pobudni fluks obuhvaćen od strane indukta.<br />
i a<br />
Ra<br />
La<br />
ω,ϑ<br />
m e<br />
J<br />
m m<br />
u a<br />
ωψ f<br />
M<br />
ψ f<br />
( i f<br />
)<br />
R f<br />
u f<br />
i f<br />
Slika 1-11 Ekvivalentna šema mašine za jednosmernu struju sa nezavisnom pobudom<br />
1.7.2 Matematički model<br />
Za elektrino kolo indukta (rotora) i pobudno kolo mogu se napisati sledee naponske,<br />
diferencijalne, jednaine:<br />
u<br />
u<br />
a<br />
f<br />
= R<br />
a<br />
= R<br />
gde su:<br />
f<br />
i<br />
a<br />
i<br />
f<br />
+ L<br />
a<br />
dia<br />
dt<br />
dψ<br />
f<br />
+ n<br />
dt<br />
+ e = R<br />
a<br />
i<br />
a<br />
+ L<br />
a<br />
dia<br />
d t<br />
u<br />
a<br />
, i a<br />
- napon i struja indukta (armature),<br />
+ ω ψ<br />
R<br />
a<br />
, L a<br />
- otpornost i induktivnost indukta (armature),<br />
e – indukovana kontra-elektromotorna sila usled rotacije, koja je dominantna na desnoj<br />
strani naponske jednačine indukta,<br />
ω – ugaona brzina obrtanja rotora,<br />
ψ<br />
f<br />
- pobudni fluks obuhvaćen induktom,<br />
f<br />
;<br />
u<br />
f<br />
, i f<br />
– napon i struja pobudnog kola,<br />
R<br />
f<br />
, L f<br />
– otpornost i induktivnost pobudnog kola,<br />
n - odnos između broja navojaka pobudnog namotaja i ekvivalentnog broja navojaka<br />
indukta.<br />
39
Veza između pobudne struje i fluksa je nelinearna i određena krivnom magnećenja:<br />
ψ =ψ<br />
f<br />
f<br />
( i f<br />
)<br />
Njutnova jednačina kretanja (rotacije), uz zanemareno trenje glasi:<br />
dω<br />
J = m e<br />
− m m<br />
d t<br />
Ovde je J momenat inercije svih obrtnih delova pogona (sveden na rotor motora),<br />
(električni) moment motora, m<br />
m<br />
– (mehanički) moment opterećenja .<br />
Električni momenat je jednak proizvodu struje i pobudnog fluksa:<br />
m<br />
=<br />
e<br />
i a<br />
ψ<br />
f<br />
a mehanički momenat je u opštem slučaju funkcija brzine, ugla rotora i vremena:<br />
m<br />
m<br />
= m ( ω,<br />
ϑ,<br />
t)<br />
,<br />
m<br />
m –<br />
e<br />
ali u praksi najčešće funkcija samo brzine.<br />
U pojedinim slučajevima (pozicioni servosistemi, zavisnost momenta opterećenja od ugla,<br />
torzija vratila) potrebno je dodati i četvrtu diferencijalnu jednačinu:<br />
dϑ =ω .<br />
dt<br />
Kao što se vidi, mašina za jednosmernu struju u najsloženijem slučaju predstavlja<br />
dinamički sistem četvrtog reda ili, ako ugao rotora nije od interesa, sistem trećeg reda.<br />
Sistem se svodi na drugi red ako se pri tome posmatraju pojave pri konstantnoj pobudi, jer<br />
otpada izvod u naponskoj jednačini pobudnog kola. Najzad, samo na prvi red, ako se<br />
zanemare pojave u induktu, jer tada otpada i izvod u naponskoj jednačini indukta.<br />
1.7.3 Jednačine ustaljenog stanja<br />
U ustaljenom stanju svi izvodi su nule, pa je matematički model znatno uprošćen i glasi:<br />
u<br />
a<br />
= R<br />
a<br />
i<br />
a<br />
+ ω ψ<br />
f<br />
u = R<br />
f<br />
ψ =ψ<br />
f<br />
f<br />
f<br />
i<br />
f<br />
( i f<br />
)<br />
m<br />
e<br />
= m m<br />
m<br />
=<br />
e<br />
i a<br />
ψ<br />
f<br />
Ovaj sistem od 5 jednačina ima 8 promenljivih. Da bi bio rešiv, potrebno je da 3<br />
promeljive budu date, npr. dve upravljačke ua<br />
i u<br />
f<br />
(ili ψ<br />
f<br />
) i jedna poremećajna m<br />
m<br />
.<br />
40
1.8 Metode za rešavanje zadataka<br />
Cilj je doći do takvog matematičkog modela kojim će se efikasno i uz zadovoljavajuću<br />
tačnost predvideti ponašanje realnog, fizičkog dinamičkog sistema. Efikasnost nas upućuje<br />
na primenu računara, pa je jedan od kriterijuma da matematički model bude pogodan za<br />
simulaciju na računaru. U osnovi, dinamički sistem se može opisati sa jednom<br />
diferencijalnom jednačinom n - tog reda ili sa n diferencijalnih jednačina prvog reda. Za<br />
analize ponašanja dinamičkih sistema se u primenjuju dve osnovne metode:<br />
• operatorska metoda,<br />
• metoda prostora stanja.<br />
Operatorska (frekfentna) metoda je praktično je primenljiva samo kod linearnih sistema<br />
sa konstantnim parametrima, tj. matematičkih modela sastavljenih iz linearnih algebarskih<br />
i integro-diferencijalnih jednačina sa konstantnim koeficijentima. Zasniva se na<br />
Laplasovoj transformaciji, kojom se pod određenim uslovima jednoznačno zamenjuje data<br />
vremenska funkcija f(t) (original) drugom funkcijom F(p) (kompleksnim likom), gde je p<br />
kompleksna promenljiva Laplasove transformacije. U osnovi, diferencijalne jednačine se<br />
po formi i mogućnostima manipulacije pretvaraju u linearne algebarske jednačine, a<br />
zavisnost svakog pojedinog izlaza od svakog pojedinog ulaza može se izraziti količnikom<br />
(prenosnom funkcijom) dva polinoma po p.<br />
Metoda prostora stanja ne menja oblik vremenskih i diferencijalnih jednačina. Eksplicitno<br />
izražavanje odnosa između promenljivih, kao kod operatorske metode, nije moguće. Ova<br />
metoda je pogodnija za primenu na računarima i ima šire područje primene – mogu se<br />
rešavati nelinearni sistemi, sistemi sa promenljivim parametrima, sistemi sa više ulaza i<br />
izlaza, stohastički sistemi, može da služi za optimalno upravljanje.<br />
Dinamički sistem se u metodi prostora stanja definiše kao skup matematičkih relacija koji<br />
povezuje dva skupa promenljivih veličina, i to izlazni skup i ulazni skup, izraženih u<br />
obliku vektora izlaznih odnosno ulaznih promenljivih y()<br />
t i z () t , respektivno. Pored ova<br />
dva skupa definiše se i treći skup, vektor stanja x () t , sa promenljivama stanja, koje u<br />
fizičkom smislu predstavljaju fizičke veličine koje karakterišu stanje nekog inercijalnog<br />
sistema (skladišta energije) u sistemu, kao što je npr. brzina v tela mase m , uglovna<br />
brzina ω obrtnog tela momenta inercije J , struja i ili fluks u prigušnici induktivnosti L ,<br />
napon u na kondenzatoru kapaciteta C i sl. Promenljive iz skupa promenljivih stanja<br />
mogu se, ali ne moraju nalaziti u skupu izlaznih promenljivih. Broj promenljivih stanja<br />
uvek je jednak redu sistema (broju skladišta energije).<br />
U slučaju linearnog dinamičkog sistema n -tog reda, sa m ulaza i k izlaza, imamo:<br />
vektor izlaza: [ ] +<br />
y t)<br />
= y ( t)<br />
y ( t)<br />
.. y ( ) ,<br />
(<br />
1 2<br />
k<br />
t<br />
z t)<br />
= z ( t)<br />
z ( t)<br />
.. z ( ) ,<br />
(<br />
1 2<br />
m<br />
t<br />
vektor ulaza: [ ] +<br />
vektor stanja: [ ] +<br />
x t)<br />
= x ( t)<br />
x ( t)<br />
.. x ( ) .<br />
(<br />
1 2<br />
n<br />
t<br />
a matematički izrazi u prostoru stanja (tzv. jednačine stanja) mogu se svesti na oblik:<br />
d x<br />
= Ax + Bz<br />
dt<br />
y = Cx +<br />
Dz<br />
x 0<br />
= x( t 0<br />
)<br />
41
gde je : A - matrica sistema dimenzija [ n, n]<br />
,<br />
B - matrica ulaza dimenzija [ n, m]<br />
,<br />
C - matrica izlaza dimenzija [ k, n]<br />
,<br />
D - matrica dimenzija [ k, m]<br />
,<br />
t0<br />
− vreme u početku posmatranja.<br />
1.8.1 Opšte jednačine stanja električne mašine<br />
Iz osnovnog matematičkog modela električne mašine:<br />
dψ<br />
u = Ri + + ω Yψ ;<br />
dt<br />
ψ = Li ;<br />
m m<br />
dω<br />
= J + Kω<br />
− Pm ;<br />
d t<br />
L<br />
i + 1 d<br />
m = Y u + i +<br />
i ;<br />
2 dϑ<br />
dϑ<br />
ω = ,<br />
d t<br />
Mora se eliminisati ili ukupni fluks ψ ili struja i , da bi jednačine sveli na potreban oblik.<br />
Sada imamo:<br />
dψ<br />
= −Ri<br />
−ω<br />
Yψ + u ,<br />
d t<br />
−1<br />
i = L ψ ,<br />
pa se zamenom dobija:<br />
−1<br />
( R L + ω Y) ψ + u<br />
dψ<br />
= −<br />
.<br />
dt<br />
Sada se odmah dobija potreban oblik jednačina:<br />
dx<br />
= A<br />
d t<br />
y =C<br />
a<br />
a<br />
a<br />
x<br />
x<br />
a<br />
a<br />
+ B<br />
x<br />
a<br />
= ψ , y<br />
a<br />
= i , z = u<br />
a<br />
z<br />
a<br />
x 0<br />
= x a<br />
( t 0<br />
)<br />
−1<br />
a<br />
, A = −( R L + ω Y)<br />
a<br />
, B = I<br />
a<br />
,<br />
−1<br />
C a<br />
=L .<br />
42
1.8.2 Matematički model mašine jednosmerne struje u prostoru stanja<br />
U opštem slučaju mašina se može shvatiti kao nelinearni dinamički sistem četvrtog reda sa<br />
vektorom stanja:<br />
[ ω ] +<br />
ψ f<br />
x = ϑ<br />
i a<br />
i vektorom ulaza:<br />
z<br />
[ u u m ] +<br />
=<br />
a f m<br />
gde je mm<br />
poremećajna promenljiva.<br />
Vektor izlaza zavisi od uloge mašine u regulisanom pogonu. Jedan od mogućih složenijih<br />
praktičnih slučajeva prikazan je na slici 1-12, gde je vektor izlaza:<br />
[ ω ] +<br />
y = i a<br />
m e<br />
ϑ<br />
m m<br />
u a<br />
u f<br />
i a<br />
ω<br />
ψ f<br />
ϑ<br />
i a<br />
m e<br />
ω<br />
ϑ<br />
Slika 1-12 Mašina za jednosmernu struju kao dinamički sistem<br />
Ako se upravljanje vrši samo preko napona u a<br />
, tj. ako je ψ<br />
f<br />
linearan, pa se može prikazati sa jednačinom stanja trećeg reda:<br />
d x<br />
= Ax + Bz<br />
dt<br />
sa vektorom stanja:<br />
[ ω ] +<br />
x = ϑ ,<br />
i a<br />
vektorom ulaza:<br />
z +<br />
= [ u m a m<br />
] ,<br />
= Ψ<br />
f<br />
= C<br />
te<br />
, model postaje<br />
43
matricom sistema i ulaza:<br />
⎡ 1 Ψ<br />
f ⎤<br />
⎢−<br />
− 0⎥<br />
⎢<br />
Ta<br />
RaTa<br />
⎥<br />
⎢<br />
⎥<br />
A = ⎢ Ψ<br />
f K ⎥<br />
m ,<br />
⎢ − 0⎥<br />
⎢ Tm<br />
Tm<br />
⎥<br />
⎢<br />
⎥<br />
⎢<br />
⎥<br />
⎣ 0 1 0⎦<br />
⎡ 1 ⎤<br />
⎢<br />
0<br />
R ⎥<br />
aTa<br />
⎢<br />
⎥<br />
⎢<br />
⎥<br />
B = ⎢ 1 ⎥<br />
⎢<br />
0 −<br />
,<br />
T ⎥<br />
m<br />
⎢<br />
⎥<br />
⎢<br />
⎥<br />
⎢⎣<br />
0 0 ⎥⎦<br />
gde je<br />
L<br />
a<br />
T<br />
a<br />
= vremenska električna konstanta indukta,<br />
Ra<br />
T<br />
J ω<br />
n<br />
m<br />
= vremenska mehanička konstanta.<br />
mb<br />
Jednačina izlaza zavisi od izbora izlaznih veličina. Ako su to, npr. brzina ω i struja i a<br />
,<br />
ona glasi y = Cx , sa vektorom izlaza:<br />
[ ω i ] +<br />
y =<br />
a<br />
i matricom izlaza:<br />
⎡1<br />
0 0⎤<br />
C = ⎢ ⎥<br />
⎣0<br />
1 0⎦<br />
1.9 Literatura<br />
[1] V. Vučković: Opšta <strong>teorija</strong> električnih mašina, Nauka, Beograd, 1992.<br />
[2] V. Vučković: Električni pogoni, Elektrotehnički fakultet, Beograd, 1997.<br />
44