Dijagram položaja korena karakteristiÄne jednaÄine zatvorenog ...
Dijagram položaja korena karakteristiÄne jednaÄine zatvorenog ...
Dijagram položaja korena karakteristiÄne jednaÄine zatvorenog ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
OSNOVI AUTOMATSKOG UPRAVLJANJA PROCESIMA<br />
Vežba br. 10: <strong>Dijagram</strong> položaja <strong>korena</strong> karakteristične<br />
jednačine <strong>zatvorenog</strong> regulacionog kola<br />
I Analiza stabilnosti <strong>zatvorenog</strong> regulacionog kola<br />
Analiza stabilnosti je jedan od najvažnijih zahteva pri projektovanju regulacionih kola.<br />
Sistem je stabilan ako se za svaku ograničenu promenu ulaza dobija ograničena<br />
promena izlaza iz sistema. Suprotno tome, sistem je nestabilan ako se za ograničenu<br />
promenu ulaza dobija neograničena promena izlaza. Za ispitivanje stabilnosti<br />
<strong>zatvorenog</strong> regulacionog kola koriste se različite metode, u zavisnosti od složenosti i<br />
karaktera elemenata kola. Najčešće korišćene metode su: Rut-Hurvicov kriterijum<br />
stabilnosti, <strong>Dijagram</strong> položaja <strong>korena</strong> karakteristične jednačine ZRK, Bode-ov i<br />
Nyquist-ov kriterijum stabilnosti.<br />
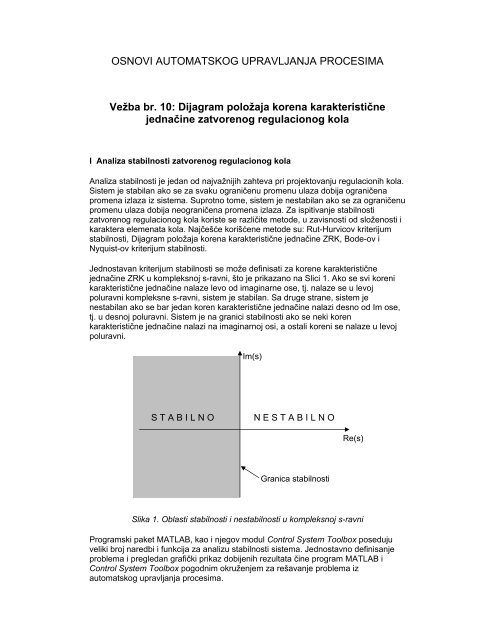
Jednostavan kriterijum stabilnosti se može definisati za korene karakteristične<br />
jednačine ZRK u kompleksnoj s-ravni, što je prikazano na Slici 1. Ako se svi koreni<br />
karakteristične jednačine nalaze levo od imaginarne ose, tj. nalaze se u levoj<br />
poluravni kompleksne s-ravni, sistem je stabilan. Sa druge strane, sistem je<br />
nestabilan ako se bar jedan koren karakteristične jednačine nalazi desno od Im ose,<br />
tj. u desnoj poluravni. Sistem je na granici stabilnosti ako se neki koren<br />
karakteristične jednačine nalazi na imaginarnoj osi, a ostali koreni se nalaze u levoj<br />
poluravni.<br />
Im(s)<br />
S T A B I L N O<br />
N E S T A B I L N O<br />
Re(s)<br />
Granica stabilnosti<br />
Slika 1. Oblasti stabilnosti i nestabilnosti u kompleksnoj s-ravni<br />
Programski paket MATLAB, kao i njegov modul Control System Toolbox poseduju<br />
veliki broj naredbi i funkcija za analizu stabilnosti sistema. Jednostavno definisanje<br />
problema i pregledan grafički prikaz dobijenih rezultata čine program MATLAB i<br />
Control System Toolbox pogodnim okruženjem za rešavanje problema iz<br />
automatskog upravljanja procesima.
II <strong>Dijagram</strong> položaja <strong>korena</strong> (DPK) u Control System modulu<br />
Jedna od najčešće korišćenih metoda za ispitivanje stabilnosti je dijagram položaja<br />
<strong>korena</strong> karakteristične jednačine (DPK). Ova metoda se zasniva na analizi u<br />
kompleksnoj ravni (Slika 1), kao i Rut-Hurvicov kriterijum. Za razliku od njega, pored<br />
kriterijuma stabilnosti, DPK pruža dodatne informacije o oscilatornosti, dominantnim<br />
korenima i dr.<br />
<strong>Dijagram</strong> položaja <strong>korena</strong> (DPK) karakteristične jednačine služi za ispitivanje<br />
stabilnosti <strong>zatvorenog</strong> regulacionog kola za pojačanja regulatora K c od 0 do ∞.<br />
Svakom pojačanju odgovara tačno onoliko tačaka u kompleksnoj s-ravni, koliko<br />
<strong>korena</strong> ima karakteristična jednačina datog sistema. Skup tačaka u s-ravni daje<br />
granu DPK. Broj grana je jednak redu sistema, odnosno stepenu karakteristične<br />
jednačine. Uobičajeno je da se polovi u DPK označavaju znakom množenja (x), a<br />
nule otvorenim kružićima. Grane polaze iz polova otvorenog kola, za K c =0, i<br />
završavaju u nulama otvorenog kola ili u beskonačnosti, za K c = ∞.<br />
U MATLABu se DPK dobija primenom naredbe rlocus. Na primer:<br />
>> rlocus([2], [1 6 11 6])<br />
kreira DPK za otvoreno kolo<br />
do ∞.<br />
2 ⋅ Kc<br />
G(<br />
s)<br />
=<br />
( s + 1)( s + 2)( s + 3)<br />
i pojačanja regulatora od 0<br />
Granica stabilnosti sistema je određena Im osom i korenima koji se nalaze na toj osi.<br />
Stoga je, u prethodnom primeru, kolo stabilno za pojačanja manja od krajnjeg<br />
pojačanja koje odgovara preseku konjugovano-kompleksnih grana sa imaginarnom<br />
osom. ZRK je oscilatorno kada ima makar jedan par konjugovano-kompleksnih<br />
<strong>korena</strong>, odnosno kompleksne grane. Ili drugačije, kolo je neoscilatorno ako ima sve<br />
realne korene karakteristične jednačine. Ovo znači da kriterijum oscilatornosti<br />
određuju tačke razdvajanja (ili spajanja) koje se nalaze na realnoj osi i predstavljaju<br />
tačke dvostrukih realnih <strong>korena</strong>.<br />
! Uočiti tačku razdvajanja u prethodnom primeru.<br />
U MATLABu, u okviru grafičkog prozora pritiskom miša na granu DPK aktivira se novi<br />
prozor sa podacima (pojačanje, koren karakteristične jednačine, frekvencija i dr.) koji<br />
odgovaraju izabranoj tački. Zadržavanjem levog tastera miša moguće je pomerati se<br />
duž grane DPK pri čemu se u skladu sa položajem menjaju i podaci u prozoru. Na taj<br />
način moguće je odrediti krajnje pojačanje ZRK koje odgovara preseku grana sa<br />
imaginarnom osom. Takođe se mogu odrediti tačke razdvajanja i spajanja grana i<br />
pojačanja koja im odgovaraju.<br />
? Odrediti za koja pojačanja je sistem iz prethodnog primera stabilan, a za koja<br />
oscilatoran.<br />
U sledećem primeru, prenosna funkcija objekta upravljanja u širem smislu je trećeg<br />
reda i sadrži dve nule:
locus([1 8 15],[1 1 1 1])<br />
Prethodna naredba kreira dijagram položaja <strong>korena</strong> karakteristične jednačine<br />
<strong>zatvorenog</strong> regulacionog kola sistema sa prenosnom funkcijom otvorenog kola:<br />
2<br />
s + 8s<br />
+ 15<br />
G( s)<br />
= Kc .<br />
3 2<br />
s + s + s + 1<br />
? Kakav je ovaj sistem u otvorenom kolu (stabilan, nestabilan ili na granici<br />
stabilnosti?<br />
? Odrediti kritičnu frekvenciju, krajnje pojačanje, tačku spajanja i pojačanje koje joj<br />
odgovara za ZRK definisano u prethodnom primeru.<br />
! Uočiti da je u ovom primeru kolo nestabilno za manja pojačanja, a da je za veća<br />
pojačanja stabilno. Takođe je oscilatorno za manja pojačanja, a neoscilatorno za<br />
veća, što je suprotno od zaključaka za prethodni primer.<br />
Osim već opisanog postupka, vrednosti pojačanja i odgovarajući koreni karakt. jedn.<br />
za izabranu tačku na dijagramu položaja <strong>korena</strong> se alternativno mogu odrediti<br />
korišćenjem naredbe rlocfind. Na primer, niz naredbi:<br />
>> rlocus([1 8 15],[1 1 1 1])<br />
>> [K,P]=rlocfind([1 8 15],[1 1 1 1])<br />
ponovo kreira prozor u kome se nalazi DPK sistema definisanog u prethodnom<br />
primeru, a korišćenjem miša se može odabrati tačka za koju program automatski<br />
određuje vrednost pojačanja i odgovarajuće vrednosti <strong>korena</strong> i ispisuje u osnovni<br />
prozor MATLABa.<br />
Pomoću DPK se, takođe, mogu predvideti oblici odziva ZRK na promenu postavne<br />
tačke za različita pojačanja regulatora. Ovakva analiza je moguća na osnovu<br />
položaja <strong>korena</strong> karakteristične jednačine, tj. određivanja dominantnih <strong>korena</strong>.<br />
Dominantni koreni su oni koji se nalaze bliže imaginarnoj osi i oni određuju ukupnu<br />
brzinu i oblik odziva.<br />
Na primer, u prethodnom primeru, za manja pojačanja u oblasti stabilnosti (K c >0.749)<br />
dominantni su konjugovano-kompleksni koreni. U tom slučaju oblik odziva sistema je<br />
kao kod oscilatornog sistema drugog reda. Za nešto veća pojačanja u oblasti<br />
stabilnosti, a ipak manja od K c =25.3, dominantni su realni koreni. U tom slučaju odziv<br />
sistema je takođe oscilatoran, ali kriva ima ukupan oblik kao odziv sistema prvog<br />
reda. Koji su koreni dominantni može se odrediti grafički u MATLABu pomoću miša i<br />
prozora sa podacima, ili se može odrediti računski ako se u karakterističnu jednačinu<br />
zamene vrednosti traženog pojačanja regulatora.<br />
? Kreirati dijagram položaja <strong>korena</strong> <strong>zatvorenog</strong> regulacionog kola sa P regulatorom.<br />
Objekat upravljanja u širem smislu je definisan prenosnom funkcijom:<br />
s + 3<br />
G ( s)<br />
=<br />
. Odrediti za koja pojačanja je sistem stabilan, a za koja<br />
( s − 0.5)( s + 1)( s + 2)<br />
oscilatoran.
! Obratiti pažnju na uslovnu stabilnost sistema iz prethodnog primera, odnosno na<br />
nestabilni element u kolu.<br />
? Kreirati dijagram položaja <strong>korena</strong> <strong>zatvorenog</strong> regulacionog kola, čiji je proces<br />
1<br />
definisan sa prenosnom funkcijom G p<br />
( s)<br />
= i odrediti vrednost krajnjeg<br />
3<br />
8( s + 1)<br />
pojačanja. Dinamika mernog i izvršnog elementa se mogu zanemariti<br />
( Gm ( s)<br />
= Gv<br />
( s)<br />
= 1).<br />
? Kreirati dijagram položaja <strong>korena</strong> karakteristične jednačine <strong>zatvorenog</strong><br />
1<br />
regulacionog kola sa procesom G p<br />
( s)<br />
= i PI regulatorom<br />
3<br />
8( s + 1)<br />
⎛ 1 ⎞<br />
Gc<br />
( s)<br />
= K<br />
c ⎜1<br />
+ ⎟ i odrediti vrednost krajnjeg pojačanja.<br />
⎝ 3.02s<br />
⎠<br />
? Kreirati dijagram položaja <strong>korena</strong> karakteristične jednačine <strong>zatvorenog</strong><br />
1<br />
regulacionog kola sa procesom G p<br />
( s)<br />
= i PID<br />
3<br />
8( s + 1)<br />
⎛ 1 ⎞<br />
regulatorom Gc ( s)<br />
= K<br />
c ⎜1+<br />
+ 0. 45s⎟ i odrediti vrednost krajnjeg pojačanja.<br />
⎝ 1.81s<br />
⎠<br />
III Približan dijagram položaja <strong>korena</strong> sistema sa mrtvim vremenom<br />
−Ds<br />
Kontinualna prenosna funkcija mrtvog vremena G( s)<br />
= e sadrži beskonačno<br />
mnogo polova i nula, te se ne može direktno koristiti za numeričke proračune u<br />
MATLABu, već se mora aproksimirati. Najčešće se koristi Pade-ova aproksimacija<br />
koja se zasniva na razvijanju eksponencijalne funkcije u Teylor-ov red i predstavlja<br />
odnos dva polinoma n-tog stepena. U MATLABU se aproksimacija mrtvog vremena<br />
dobija primenom naredbe pade. Na primer:<br />
>> pade(1,2)<br />
kreira grafički prikaz odziva sistema na stepenastu promenu i faznu karakteristiku čija<br />
−s<br />
prenosna funkcija G( s)<br />
= e (čisto kašnjenje D=1 s) je aproksimirana Pade-ovom<br />
aproksimacijom drugog reda.<br />
Brojilac i imenilac Pade-ove aproksimacije mogu se dobiti primenom naredbe:<br />
>> [num, den]=pade(1,2)<br />
za čisto kašnjnje od 1 s i aproksimaciju drugog reda.<br />
<strong>Dijagram</strong> položaja <strong>korena</strong> za element mrtvog vremena iz predhodnog primera se<br />
kreira pomoću:<br />
>> rlocus(num, den)
! Tačnost aproksimacije se povećava sa povećanjem stepena polinoma.<br />
−3s<br />
? Čisto kašnjnje sistema G(<br />
s)<br />
= aproksimirati Pade-ovom aproksimacijom 4 reda.<br />
Kreirati grafike: odziva aproksimacije na stepenatu promenu, frekventne<br />
karakteristike i dijagrama položaja <strong>korena</strong>.<br />
? Varirati stepen aproksimacije: 6, 10, 15, 30 za sistem definisan u prethodnom<br />
primeru i uočiti kako se menjaju grafici odziva i DPK.<br />
###<br />
1. a) Kreirati dijagram položaja <strong>korena</strong> ZRK sa objektom upravljanja u širem smislu<br />
definisanim prenosnom funkcijom:<br />
2<br />
s − 0.5s<br />
+ 1<br />
G ( s)<br />
=<br />
2<br />
s(<br />
s + 2s<br />
+ 1)<br />
b) odrediti pojačanja za koja je sistem stabilan i pojačanja kada je sistem oscilatoran.<br />
2. a) Kreirati DPK karakteristične jednačine <strong>zatvorenog</strong> regulacionog kola, kome<br />
odgovara prenosna funkcija otvorenog kola:<br />
G(<br />
s)<br />
= K<br />
c<br />
1<br />
( s + 1)( s + 2)( s + 3)( s − 0.2)<br />
pri promeni pojačanja regulatora od Kc=0 do Kc=∞.<br />
b) Za koje vrednosti pojačanja regulatora je ovo regulaciono kolo stabilno, a za koje<br />
oscilatorno?<br />
3. Prenosna funkcija procesa je:<br />
G 4<br />
= p 2<br />
2s<br />
+ 2s<br />
+ 1<br />
,<br />
a dinamika mernog elementa se može prikazati prenosnom funkcijom:<br />
G 0.5<br />
= m s + 1<br />
,<br />
dok se dinamika izvršnog elementa može zanemariti.<br />
Upravljanje se vrši PI regulatorom, čije je integralno vreme 3.<br />
a) Skicirati dijagram položaja <strong>korena</strong> <strong>zatvorenog</strong> regulacionog kola za pojačanja PI<br />
regulatora od 0 do ∞.<br />
b) Odrediti pojačanja regulatora za koja je kolo stabilno i oscilatorno.<br />
c) Skicirati odzive <strong>zatvorenog</strong> regulacionog kola na jediničnu stepanastu promenu<br />
postavne tačke za slučajeve da je pojačanje PI regulatora: 0.1, 1, 1.5 i 2.