predavanje-8 2011 dinamika - male oscilacije
predavanje-8 2011 dinamika - male oscilacije
predavanje-8 2011 dinamika - male oscilacije

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
8.0 STRUKTURNA ANALIZA KONSTRUKCIJA – DR MIOMIR JOVANOVIĆ MAŠINSKI FAKULTET NIŠ<br />
Predavanje - 8<br />
DINAMIKA NOSEĆIH STRUKTURA<br />
Generacija 2010/<strong>2011</strong><br />
Male <strong>oscilacije</strong> mehaničkih sistema<br />
Materijalni mašinski sistemi, izloženi promenljivim spoljašnjim uticajima, osciluju. Oscilatorni procesi su jedan od oblika<br />
dinamičkog ponašanja mehaničkog sistema. Dinamičko ponašanje opisuje radna stanja mehaničkih sistema pogonskih mehanizama ili<br />
noseće konstrukcije. Izučavanje oscilatornih dinamičkih procesa je osnov projektovanja najvećeg broja mašinskih sistema. Osnovna<br />
teorijska podloga za dinamičku analizu je u klasičnoj mehanici. Materijalni sistemi se postupcima mehanike svode (diskretizuju) na<br />
mehaničke sisteme sa konačnim brojem stepeni slobode oscilovanja. Takvi mehanički sistemi se dalje tretiraju Teorijom malih oscilacija<br />
sa konačnim brojem stepeni slobode, koja predstavlja osnov najvećeg broja univerzalnih softvera za dinamičku analizu. Zavisno od<br />
namene komercijalnih programa za računare, dinamička analiza se može izvršiti i sa znatno većom širinom.<br />
Teorija malih oscilacija sa konačnim brojem stepeni slobode kretanja pogodna je za analizu oscilacija nosećih struktura<br />
različitih tipova mašina. Ova teorija opisuje dinamičko ponašanje konstrukcije, talasnim parcijalnim diferencijalnim jednačinama sa<br />
odgovarajućim graničnim i početnim uslovima. Polazeći od pretpostavke o solidifikaciji pojedinih elemenata, zanemarivanjem elastičnih<br />
deformacija i inercionih svojstava nekih elemenata, zadržavajući se samo na elastičnim osobinama konstrukcije, prelazimo na<br />
ekvivalentni model. Na bazi energije ekvivalentnog modela, primenom nekog od principa mehanike (Lagrange-II), formiraju se obične<br />
diferencijalne jednačine kretanja.<br />
Matematički modeli, koji uzimaju i elastične deformacije u obzir, vode nelinearnim diferencijalnim jednačinama koje se ne<br />
mogu tačno analitički rešiti, pa se rešavaju aproksimativno. Ponekad je moguće izvršiti linearizaciju jednačina, čime se ubrzava postupak<br />
traženja rešenja. Očigledno da su ovako dobijena rešenja malih oscilacija približna, ali su osnovna dinamička karakteristika, dobijena<br />
primenom nelinearne analize.<br />
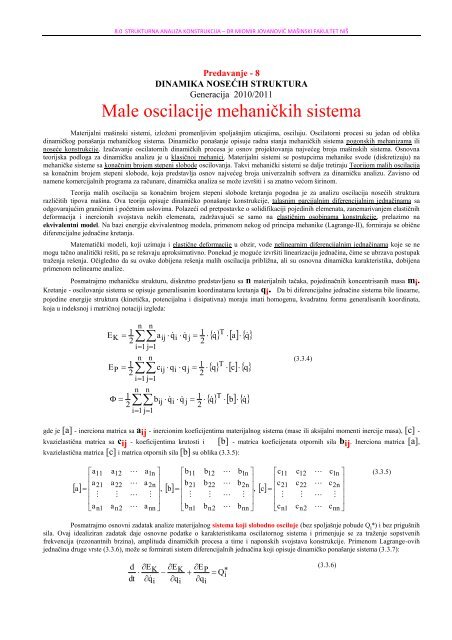
Posmatrajmo mehaničku strukturu, diskretno predstavljenu sa n materijalnih tačaka, pojedinačnih koncentrisanih masa m i .<br />
Kretanje - oscilovanje sistema se opisuje generalisanim koordinatama kretanja q i . Da bi diferencijalne jednačine sistema bile linearne,<br />
pojedine energije struktura (kinetička, potencijalna i disipativna) moraju imati homogenu, kvadratnu formu generalisanih koordinata,<br />
koja u indeksnoj i matričnoj notaciji izgleda:<br />
EK<br />
<br />
EP<br />
<br />
1<br />
2<br />
1<br />
2<br />
n n<br />
aij<br />
q<br />
i q<br />
j <br />
i1<br />
j1<br />
n n<br />
cij<br />
qi<br />
q j <br />
i1<br />
j1<br />
1<br />
2<br />
1<br />
2<br />
<br />
<br />
q<br />
<br />
q<br />
<br />
T<br />
<br />
T<br />
<br />
1 n n<br />
b q q 1 q<br />
<br />
T<br />
2 ij i<br />
j <br />
2<br />
i1<br />
j1<br />
a<br />
q<br />
<br />
c<br />
q<br />
<br />
b<br />
q<br />
<br />
(3.3.4)<br />
gde je [a] - inerciona matrica sa a ij - inercionim koeficijentima materijalnog sistema (mase ili aksijalni momenti inercije masa), [c] -<br />
kvazielastična matrica sa c ij - koeficijentima krutosti i [b] - matrica koeficijenata otpornih sila b ij . Inerciona matrica [a],<br />
kvazielastična matrica [c] i matrica otpornih sila [b] su oblika (3.3.5):<br />
a11<br />
<br />
a<br />
<br />
<br />
an1<br />
a12<br />
a<br />
a1n<br />
b11<br />
b12<br />
b1n<br />
c11<br />
c12<br />
c1n<br />
(3.3.5)<br />
a<br />
<br />
b b b<br />
<br />
<br />
<br />
c21<br />
c22<br />
c2n<br />
<br />
<br />
<br />
<br />
<br />
ann<br />
bn1<br />
bn2<br />
bnn<br />
cn1<br />
cn2<br />
cnn<br />
<br />
21 22 2n<br />
<br />
21 22 2n<br />
a<br />
, b<br />
,<br />
c<br />
<br />
an2<br />
Posmatrajmo osnovni zadatak analize materijalnog sistema koji slobodno osciluje (bez spoljašnje pobude Q i<br />
*) i bez prigušnih<br />
sila. Ovaj idealiziran zadatak daje osnovne podatke o karakteristikama oscilatornog sistema i primenjuje se za traženje sopstvenih<br />
frekvencija (rezonantnih brzina), amplituda dinamičkih procesa a time i naponskih svojstava konstrukcije. Primenom Lagrange-ovih<br />
jednačina druge vrste (3.3.6), može se formirati sistem diferencijalnih jednačina koji opisuje dinamičko ponašanje sistema (3.3.7):<br />
d<br />
dt<br />
E<br />
K<br />
q<br />
i<br />
E<br />
K<br />
qi<br />
E<br />
P<br />
qi<br />
Q<br />
<br />
i<br />
(3.3.6)
a11<br />
q<br />
1 a12<br />
q2<br />
<br />
a1n<br />
qn<br />
c11q1<br />
c12q2<br />
c1n<br />
qn<br />
0<br />
a21<br />
q1<br />
a22<br />
q2<br />
<br />
a2n<br />
qn<br />
c21q1<br />
c22q2<br />
c2nqn<br />
0<br />
an1<br />
q1<br />
an2<br />
q2<br />
<br />
ann<br />
qn<br />
cn1q1<br />
cn2q2<br />
cnnqn<br />
0<br />
(3.3.7a)<br />
Ovaj sistem jednačina u matričnoj formi ima oblik:<br />
a q<br />
<br />
c<br />
q<br />
<br />
0<br />
<br />
<br />
(3.3.7b)<br />
Rešenje se prema tipu diferencijalnih jednačina i oscilatornom karakteru problema, može potražiti u trigonometrijskom obliku, forme:<br />
qi<br />
(3.3.8)<br />
Ai<br />
sin(<br />
t<br />
)<br />
gde su Ai<br />
, i i i<br />
(i=1n), karakteristike oscilovanja sistema (amplituda, kružna frekvencija oscilovanja i fazna pomeranja).<br />
Ova forma rešenja u diferencijalnim jednačinama daje oblik:<br />
Ili matrično:<br />
(c a<br />
2<br />
) A (c a<br />
2<br />
) A (c a<br />
2<br />
11 11<br />
1 12 12<br />
2 1n 1n<br />
) An<br />
0<br />
(c a<br />
2<br />
) A (c a<br />
2<br />
) A (c a<br />
2<br />
21 21<br />
1 22 22<br />
2 2n 2n<br />
) An<br />
0<br />
(c a<br />
2<br />
) A (c a<br />
2<br />
) A (c a<br />
2<br />
n1 n1<br />
1 n2 n2<br />
2 nn nn<br />
) An<br />
0<br />
H A<br />
<br />
0<br />
<br />
(3.3.9b)<br />
(3.3.9a)<br />
Uvedena matrica [H] je karakteristična matrica sistema. Pomoću nje se formira frekventna jednačina (3.3.10) njenim<br />
izjednačavanjem sa nulom. Rešenja frekventne jednačine daju sopstvene frekvencije posmatranog sistema. Zato je ova jednačina poznata<br />
pod imenom frekventna ili karakteristična jednačina sistema.<br />
c a<br />
2<br />
c a<br />
2<br />
c a<br />
2<br />
(3.3.10)<br />
<br />
11 11<br />
11 11<br />
1n 1n<br />
<br />
<br />
<br />
c a<br />
2<br />
c a<br />
2<br />
c a<br />
2<br />
detH<br />
H 21 21<br />
22 22<br />
2n 2n<br />
<br />
<br />
c <br />
2<br />
<br />
<br />
a<br />
0<br />
<br />
<br />
<br />
<br />
c<br />
a<br />
2<br />
c a<br />
2<br />
c a<br />
2<br />
n1 n1<br />
n2 n2<br />
nn nn<br />
<br />
Rešenja frekventne jednačine se mogu poredjati po veličini (3.3.11) i predstavljaju kvadrate sopstvenih kružnih frekvencija sistema:<br />
<br />
2 2 2 2<br />
( 1)<br />
(2)<br />
(3)<br />
(n)<br />
, (1)<br />
<br />
<br />
0<br />
(3.3.11)<br />
Rešenja polinoma frekventne jednačine se traže nekom od numeričkih metoda (postupak Bairstowa). Najniža kružna frekvencija ovog<br />
polinoma ω (1) , naziva se osnovnom frekvencijom. Ona je jedan od osnovnih dinamičkih svojstava konstrukcije i na osnovu nje se<br />
može birati prinudna frekvencija mašine tako da je izvan oblasti sopstvenih frekvencija.<br />
Amplitude oscilovanja se ne mogu analitički direktno odrediti u zatvorenom obliku, već samo njihovi odnosi. Ovi odnosi se<br />
traže za svaku sopstvenu frekvenciju konstrukcije ω (r) . Da bi sistem homogenih algebarskih jednačina imao n-1 nezavisno rešenje,<br />
obično se izostavlja jedna jednačina (prva). Deljenjem sa A 1 i prebacivanjem slobodnog člana na desnu stranu sledi:<br />
A<br />
(c a<br />
2<br />
) 2<br />
11 11<br />
<br />
A1<br />
A<br />
(c a<br />
2<br />
) 2<br />
22 22<br />
<br />
A1<br />
<br />
A<br />
(c a<br />
2<br />
) 2<br />
n2 n2<br />
<br />
A1<br />
<br />
<br />
<br />
<br />
A<br />
(c a<br />
2<br />
) n<br />
1n 1n<br />
<br />
A1<br />
A<br />
(c a<br />
2<br />
) n<br />
2n 2n<br />
<br />
A1<br />
<br />
A<br />
(c a<br />
2<br />
) n<br />
nn nn<br />
<br />
A1<br />
(c<br />
a<br />
2<br />
11 11<br />
)<br />
(c<br />
a<br />
2<br />
21 21<br />
)<br />
<br />
(c<br />
a<br />
2<br />
n1 n1<br />
)<br />
(3.3.12)<br />
Nepoznati količnici amplituda mogu se označiti sa ik<br />
i odredjuju se pomoću kofaktora k (r) ik<br />
sopstvenu frekvenciju:<br />
determinante matrice H, za svaku r-tu<br />
(r)<br />
(r) A<br />
2<br />
21<br />
<br />
(r)<br />
A<br />
1<br />
(r)<br />
k<br />
12 ,<br />
(r)<br />
k<br />
11<br />
(r)<br />
(r) A<br />
3<br />
31<br />
<br />
(r)<br />
A<br />
1<br />
(r)<br />
k<br />
(r)<br />
13 (r) A<br />
,...... n<br />
(r) n1<br />
<br />
(r)<br />
k<br />
11<br />
A<br />
1<br />
(r)<br />
k<br />
1n<br />
(r)<br />
k<br />
11<br />
(3.3.13)
8.0 STRUKTURNA ANALIZA KONSTRUKCIJA – DR MIOMIR JOVANOVIĆ MAŠINSKI FAKULTET NIŠ<br />
Kofaktori k (r) 11 , k(r) 12 , k(r) 1n<br />
kolone. Tako, recimo, imamo kofaktore:<br />
c a<br />
2<br />
22 22<br />
(r)<br />
c a<br />
2<br />
(r)<br />
k ( 1)<br />
1 1 32 32<br />
(r)<br />
11<br />
<br />
<br />
<br />
<br />
c a<br />
2<br />
n2 n2<br />
(r)<br />
se odredjuju iz determinante matrice H izostavljanjem odgovarajuće vrste i odgovarajuće<br />
c a<br />
2<br />
c a<br />
2 (3.3.14a)<br />
23 23<br />
(r)<br />
2n 2n<br />
(r)<br />
c a<br />
2<br />
33 33<br />
(r)<br />
<br />
<br />
<br />
c a<br />
2<br />
3n 3n<br />
(r)<br />
,<br />
<br />
c a<br />
2<br />
n3 n3<br />
(r)<br />
c a<br />
2<br />
nn nn<br />
(r)<br />
c a<br />
2<br />
21 21<br />
(r)<br />
c a<br />
2<br />
(r)<br />
k ( 1)<br />
1 2 31 31<br />
(r)<br />
12<br />
<br />
<br />
<br />
<br />
c a<br />
2<br />
n1 n1<br />
(r)<br />
c a<br />
2<br />
23 23<br />
(r)<br />
c a<br />
2<br />
33 33<br />
(r)<br />
<br />
c a<br />
2<br />
n3 n3<br />
(r)<br />
<br />
<br />
<br />
<br />
c a<br />
2<br />
2n 2n<br />
(r)<br />
c a<br />
2<br />
3n 3n<br />
(r)<br />
,<br />
<br />
c a<br />
2<br />
nn nn<br />
(r)<br />
(3.3.14b)<br />
c<br />
2<br />
21 a21<br />
(r)<br />
2<br />
(r) 1 3 c31<br />
a31<br />
k<br />
(r)<br />
13<br />
( 1)<br />
<br />
<br />
<br />
c<br />
2<br />
n1 an1<br />
(r)<br />
c<br />
2<br />
22 a22<br />
(r)<br />
c<br />
2<br />
32 a32<br />
(r)<br />
<br />
c<br />
2<br />
n2 an2<br />
(r)<br />
<br />
<br />
<br />
<br />
c<br />
2<br />
2n a2n<br />
(r)<br />
c<br />
2<br />
3n a3n<br />
(r)<br />
<br />
c<br />
2<br />
nn ann<br />
(r)<br />
(3.3.14c)<br />
Na ovaj način se mogu naći koeficijenti (r) za svaku r-tu sopstvenu frekvenciju i oni se nazivaju koeficijentima oblika oscilovanja.<br />
ik<br />
Kako fizički ovi koeficijenti pokazuju načine, oblike, kako diskretne mase zauzimaju medjusobno položaje, ovi oblici se nazivaju i<br />
modovi oscilovanja ili harmonici. Jasno je da modova ima onoliko koliko i sopstvenih frekvencija. Preostalo je još da se definišu zakoni,<br />
)<br />
generalisane koordinate kretanja. Podjimo od partikularnih integrala rešenja:<br />
q<br />
(r)<br />
A<br />
(r)<br />
sin(<br />
(r)<br />
t (r)<br />
(3.3.15)<br />
Opšta rešenja problema (opšti integrali diferencijalnih jednačina) se, prema teoriji diferencijalnih jednačina, traže kao zbir partikularnih<br />
rešenja, (3.3.16a), (3.3.16b), (3.3.16c):<br />
(3.3.16a)<br />
n<br />
(r) (1) (2) (n)<br />
q1<br />
q<br />
1<br />
q<br />
1<br />
q<br />
1<br />
<br />
q<br />
1<br />
r1<br />
n<br />
(r) (1) (2) (n)<br />
q2<br />
q<br />
2<br />
q<br />
2<br />
q<br />
2<br />
<br />
q<br />
2<br />
r1<br />
<br />
n<br />
( r) ( 1) ( 2) ( n)<br />
q n q<br />
n q n q n <br />
q n<br />
r1<br />
q q<br />
( 1) q<br />
(2) <br />
q<br />
(n)<br />
(3.3.16b)<br />
<br />
n<br />
(r) (r)<br />
q A<br />
1<br />
<br />
1<br />
sin(<br />
(r)<br />
t (r)<br />
)<br />
(3.3.16c)<br />
r1<br />
Konstante A (1) 1<br />
, A (2) 1<br />
, A (3) 1<br />
, ... , A (n) 1<br />
, 1<br />
, 2<br />
, .... , n<br />
, se dobijaju iz početnih uslova:<br />
t = 0, q1 = q10,<br />
q2<br />
= q20,...<br />
qn<br />
= qn0,<br />
q<br />
1 = q<br />
10,<br />
q<br />
2 = q<br />
20,...q<br />
n = q<br />
n0.<br />
Rad se može znatno uprostiti uvodjenjem glavnih koordinata. To su generalisane koordinate tako izabrane, da izrazi za E k i E p sadrže<br />
samo kvadratne članove (pa je a jk<br />
=c jk<br />
=0, za slučaj jk). To se izvodi homogenom linearnom transformacijom.<br />
PRIMER:<br />
Posmatrajmo transportnu mašinu – odlagač mase oko 168 t, oslonjen na obrtnom ležaju. Odlagač je izložen različitim atmosferskim i<br />
pogonskim delovanjima. Odrediti nekoliko prvih oblika oscilovanja. Koristiti FEM metodu, softver MSC Nastran 2004.<br />
Tabela VII Mod-1 Mod-28 Mod-31 Mod-47 Mod-56 Mod-57 Mod-58 Mod-68<br />
Ω [Hz] 0.0199 0.9213 0.9868 2.6878 3.9978 4.5699 5.0794 8.7624
Title : MODALNA analiza sa gornjim osloncem<br />
Output Set 01 - Mode 1, ω= 0.0199211 Hz<br />
Set MAX/MIN Summary Table Set ID Value<br />
T1 Translation Minimum 101 1068 -0.00028391<br />
Maximum 101 1008 0.00028391<br />
T2 Translation Minimum 101 1065 -0.0013422<br />
Maximum 101 1005 0.0013422<br />
T3 Translation Minimum 101 1039 -0.0011061<br />
Maximum 101 170 0.008734<br />
R1 Rotation Minimum 101 1150 0.00051951<br />
Maximum 101 1149 0.00055493<br />
R2 Rotation Minimum 101 1150 -0.00018757<br />
Maximum 101 1152 -0.000040145<br />
R3 Rotation Minimum 101 1147 -1.2894E-6<br />
Maximum 101 1150 0.0000012896<br />
Mod 1, Frekvencija 0.0199211 Hz (bočno kladenje celine oko uzdužne ose strele)<br />
Output Set 28 - Mode 28, ω= 0.921305 Hz<br />
Set MAX/MIN Summary Table Set ID Value<br />
T1 Translation Minimum 128 1151 -0.0077007<br />
Maximum 128 1147 0.00071326<br />
T2 Translation Minimum 128 1151 -0.019526<br />
Maximum 128 1150 0.015404<br />
T3 Translation Minimum 128 532 -0.00027012<br />
Maximum 128 750 0.0002698<br />
R1 Rotation Minimum 128 217 -0.000065389<br />
Maximum 128 216 0.0001008<br />
R2 Rotation Minimum 128 234 -0.000062802<br />
Maximum 128 182 0.000066206<br />
R3 Rotation Minimum 128 1150 -0.0029217<br />
Maximum 128 1152 0.0033823<br />
Mod 28, Frekvencija 0.921305 Hz<br />
Output Set 47 - Mode 47, ω= 2.687841 Hz<br />
Set MAX/MIN Summary Table Set ID Value<br />
T1 Translation Minimum 147 1149 -0.00062309<br />
Maximum 147 215 0.0010408<br />
T2 Translation Minimum 147 215 -0.00091302<br />
Maximum 147 472 0.0048171<br />
T3 Translation Minimum 147 218 -0.00048009<br />
Maximum 147 234 0.00053636
8.0 STRUKTURNA ANALIZA KONSTRUKCIJA – DR MIOMIR JOVANOVIĆ MAŠINSKI FAKULTET NIŠ<br />
R1 Rotation Minimum 147 1038 -0.00060863<br />
Maximum 147 1097 0.00068772<br />
R2 Rotation Minimum 147 1097 -0.00030119<br />
Maximum 147 1038 0.00029156<br />
R3 Rotation Minimum 147 1036 -0.0005846<br />
Maximum 147 318 0.0023072<br />
Output Set 87 - Mode 87, ω= 15.95396 Hz<br />
Mod 47, Frekvencija 2.6878 Hz (poskakivanje krajeva)<br />
Set MAX/MIN Summary Table Set ID Value<br />
T1 Translation Minimum 187 651 -0.010046<br />
Maximum 187 1048 0.0054741<br />
T2 Translation Minimum 187 824 -0.0091452<br />
Maximum 187 505 0.0091113<br />
T3 Translation Minimum 187 307 -0.010581<br />
Maximum 187 306 0.0097016<br />
R1 Rotation Minimum 187 391 -0.0064671<br />
Maximum 187 476 0.006184<br />
R2 Rotation Minimum 187 359 -0.011596<br />
Maximum 187 388 0.012048<br />
R3 Rotation Minimum 187 1054 -0.0094465<br />
Maximum 187 651 0.017005<br />
Mod 87, Frekvencija 15.9539 Hz (dvostruki vertikalni sinusni talas)<br />
Numeričke metode za rešavanje problema malih oscilacija<br />
Rešavanje diferencijalnih jednačina oscilovanja konstrukcija stvara ozbiljne poteškoće kod velikih i složenih sistema konstrukcija<br />
izloženih dejstvu proizvoljnih pobudnih sila. Tada se po pravilu rešenje traži numerički. U tu svrhu, razvijene su numeričke metode koje<br />
se zasnivaju na prevodjenju diferencijalnih jednačina u približne jednačine. Osnovna metoda je metoda konačnih razlika, kod koje se<br />
kontinualni proces izučava u konačnom broju dovoljno malih vremenskih intervala. U tim malim intervalima moguće je funkcije<br />
vremena (koordinate, sile, brzine) aproksimovati približnim izrazima. Zatim se vrši integracija u svakom elementarnom intervalu, pri<br />
čemu se rezultati integracije u prethodnom intervalu uzimaju kao početni za naredni vremenski interval. U okviru ovog koncepta koriste<br />
se dve opšte metode: metoda direktnog integraljenja i metoda slaganja glavnih oblika oscilovanja. Metode direktnog integraljenja se<br />
sastoje u zameni diferencijalnih jednačina malih oscilacija sistema, sistemom algebarskih jednačina sa nepoznatim priraštajima<br />
koordinata. To se realizuje tako što se funkcija pomeranja (generalisana koordinata), funkcija brzine i ubrzanja u malim vremenskim<br />
intervalima mogu zameniti približnim funkcijama, pa se onda uvode u sistem diferencijalnih jednačina i vrši njihova integracija. Termin<br />
"direktna" integracija je vezan za činjenicu da se ne vrše mnogobrojne operacije nad sistemom jednačina, već se neposredno integrale.<br />
Danas se u dinamičkoj analizi koriste tri metode za direktnu integraciju: Metoda centralnih razlika, Wilson-ova "teta" metoda i<br />
Newmark-ova metoda.