Maturitná téma: Kinematika hmotného bodu - Zmaturuj.sk
Maturitná téma: Kinematika hmotného bodu - Zmaturuj.sk
Maturitná téma: Kinematika hmotného bodu - Zmaturuj.sk

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
1 <strong>Kinematika</strong> hmotného <strong>bodu</strong><br />
- kinematika sa zaoberá určením polôh bodov a ich zmien v čase (kinematika pohyb telesa opisuje,<br />
nezaoberá sa príčinami pohybu)<br />
- pri teoretickom štúdiu mechanického pohybu (proces, pri ktorom sa mení poloha jedného telesa<br />
vzhľadom na iné teleso) sa zavádza pojem hmotný bod<br />
o<br />
hmotný bod je teleso, pri ktorom sa hmotnosť telesa zachováva, ale jeho rozmery sa<br />
zanedbávajú<br />
- na opis mechanického pohybu sa zavádza vzťažný bod a vzťažná sústava, vzhľadom na ktorú<br />
určujeme polohu telesa a jej zmenu v závislosti od času<br />
- pokoj alebo pohyb môžeme určovať len vzhľadom na vzťažnú sústavu – relatívnosť pokoja<br />
a pohybu (relatívnosť mechanického pohybu znamená, že opis pohybu závisí od voľby vzťažnej<br />
sústavy)<br />
- trajektória je množina (súhrn) všetkých polôh, v ktorých sa hmotný bod pri pohybe vy<strong>sk</strong>ytuje,<br />
dĺžka trajektórie sa nazýva dráha<br />
- ak trajektória hmotného <strong>bodu</strong> je časť priamky, koná bod priamočiary pohyb, v ostatných<br />
prípadoch je to krivočiary pohyb<br />
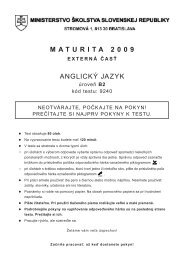
1.1 polohový vektor<br />
z<br />
- veľkosť polohového vektora:<br />
o<br />
y<br />
k r i<br />
j<br />
r r<br />
P<br />
2 2<br />
r = x + y + z<br />
x<br />
- polohový vektor určuje polohu hmotného <strong>bodu</strong> vzhľadom na<br />
súradnicovú sústavu<br />
- poloha v priestore je jednoznačne daná polohovým vektorom<br />
OP = r , pre ktorý platí:<br />
o<br />
r = xi + y j + zk<br />
r =<br />
( x,<br />
y,<br />
z)<br />
- x, y, z sú súradnice vektora a i , j , k sú jednotkové<br />
vektory v smere jednotlivých osí, platí:<br />
o<br />
i ⊥ j ⊥ k<br />
i<br />
=<br />
j = k =1<br />
- smer polohového vektora:<br />
o smer polohového vektora sa určuje pomocou uhlov α, β, γ, ktoré zviera smer polohového<br />
vektora so smermi jednotlivých súradnicových osí x, y, z<br />
x y z<br />
2<br />
2<br />
2<br />
o cos α = , cos β = , cos γ = , zároveň platí: cos α + cos β + cos γ = 1<br />
r r r<br />
1.2 rýchlosť<br />
- rýchlosť pohybujúceho sa <strong>bodu</strong> sa môže v každom okamihu meniť,<br />
nemusí byť konštantná<br />
- priemerná rýchlosť hmotného <strong>bodu</strong>:<br />
o zmena polohového vektora <strong>bodu</strong> za čas t<br />
r( t) − r( t ) ∆r<br />
0<br />
o v p<br />
= = v = m s<br />
t − t0<br />
∆t<br />
- okamžitá rýchlosť hmotného <strong>bodu</strong>:<br />
1<br />
, [ ] . −<br />
y<br />
z<br />
r(t 0 )<br />
r(t)<br />
x<br />
1
o<br />
prvá derivácia polohového vektora podľa času<br />
( t) − r( t )<br />
r<br />
o v0<br />
= lim<br />
t → t0<br />
t − t0<br />
- zložky rýchlosti:<br />
dr d<br />
v0<br />
dt dt<br />
- veľkosť rýchlosti:<br />
xi<br />
0<br />
=<br />
y j<br />
dr<br />
dt<br />
zk<br />
dx<br />
i<br />
dt<br />
o = = ( + + ) = + + k = v i + v j v k<br />
dy<br />
dt<br />
j<br />
dz<br />
dt<br />
2<br />
2<br />
2<br />
2 2 2 ⎛ dx ⎞ ⎛ dy ⎞ ⎛ dz ⎞<br />
0<br />
= vx<br />
+ v<br />
y<br />
+ vz<br />
= ⎜ ⎟ + ⎜ ⎟ + ⎜ ⎟<br />
⎠<br />
x y<br />
+<br />
o v<br />
⎝ dt ⎠ ⎝ dt ⎠ ⎝ dt<br />
- smer rýchlosti:<br />
o keďže hodnota derivácie funkcie v bode sa rovná smernici dotyčnice ku grafu funkcie, tak<br />
rýchlosť má smer dotyčnice k trajektórii<br />
o smer rýchlosti sa určuje pomocou uhlov α, β, γ, ktoré zviera smer rýchlosti so smermi<br />
jednotlivých súradnicových osí x, y, z<br />
z<br />
o<br />
v x<br />
v y<br />
cos α = , cos β = ,<br />
v v<br />
v z<br />
cos γ = , zároveň platí: cos<br />
2 cos<br />
2 cos<br />
2<br />
α + β + γ = 1<br />
v<br />
1.3 zrýchlenie<br />
- zrýchlenie pohybujúceho sa <strong>bodu</strong> sa môže v každom okamihu meniť, nemusí byť konštantné<br />
- charakterizuje zmenu pohybového stavu<br />
- priemerné zrýchlenie hmotného <strong>bodu</strong>:<br />
o zmena vektora rýchlosti za čas t<br />
v ( t)<br />
( t) − v( t )<br />
v<br />
0 ∆v<br />
2<br />
o a p<br />
= = , [ a ] = m. s<br />
−<br />
t − t0<br />
∆t<br />
- okamžité zrýchlenie hmotného <strong>bodu</strong>:<br />
o prvá derivácia rýchlosti podľa času (druhá derivácia<br />
polohového vektora podľa času)<br />
o<br />
a<br />
0<br />
( t) − v( t )<br />
v<br />
= lim<br />
t → t0<br />
t − t0<br />
dv d<br />
dt dt<br />
- zložky zrýchlenia:<br />
dv d<br />
a0<br />
= =<br />
dt dt<br />
- veľkosť zrýchlenia:<br />
0<br />
=<br />
d d r<br />
dt dt<br />
dv<br />
dt<br />
d d<br />
dt dt<br />
d r<br />
dt<br />
2<br />
o a<br />
0<br />
= = v = = r =<br />
2<br />
dv<br />
dt<br />
x<br />
z<br />
o ( v i + v j + v k) = i + j + k = a i + a j a k<br />
dv<br />
dt<br />
dv<br />
dt<br />
y<br />
x y z<br />
x y<br />
+<br />
2<br />
2<br />
2<br />
2 2 2 ⎛ dv ⎞ ⎛ dv ⎞<br />
x<br />
y ⎛ dvz<br />
⎞<br />
⎜ ⎟<br />
0<br />
= ax<br />
+ a<br />
y<br />
+ az<br />
= ⎜ ⎟ + + ⎜ ⎟<br />
⎠<br />
o a<br />
⎜ ⎟<br />
⎝ dt ⎠ ⎝ dt ⎠ ⎝ dt<br />
- smer zrýchlenia:<br />
o smer zrýchlenia sa určuje pomocou uhlov α, β, γ, ktoré zviera smer zrýchlenia so smermi<br />
jednotlivých súradnicových osí x, y, z<br />
v ( t 0<br />
)<br />
z<br />
o<br />
a x<br />
a y<br />
cos α = , cos β = ,<br />
v v<br />
a z<br />
cos γ = , zároveň platí: cos<br />
2 cos<br />
2 cos<br />
2<br />
α + β + γ = 1<br />
v<br />
2
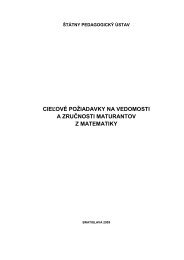
1.4 zrýchlenie pri krivočiarom pohybe<br />
- zrýchlenie pri krivočiarom pohybe sa rozdeľuje ne zložku tangenciálnu (dotyčnicovú) a zložku<br />
normálovú (dostredivú), pričom výsledné zrýchlenie je vektorovým súčtom týchto zložiek:<br />
o<br />
a = a t<br />
+ an<br />
- pre obvodovú rýchlosť platí: v = vτ<br />
- τ (má smer dotyčnice ku krivke) a ρ (má smer normály ku krivke) sú<br />
jednotkové vektory, pričom platí:<br />
o<br />
τ ⊥ ρ a zároveň τ = ρ = 1<br />
- pre zrýchlenie platí:<br />
dv d<br />
o a = = ( v )<br />
- pre τ platí:<br />
o<br />
o<br />
dt<br />
τ .τ = 1 ⇒<br />
o<br />
- podľa obr. platí:<br />
o<br />
- platí:<br />
dt<br />
dv dτ<br />
τ = τ + v<br />
dt dt<br />
dτ<br />
dτ<br />
dτ<br />
dτ<br />
dτ<br />
τ + τ = 0 ⇒ 2. τ = 0 ⇒ τ ⊥ ⇒ ⊥ ρ<br />
dt dt dt<br />
dt dt<br />
d τ je zmena vektora τ za čas dt<br />
d τ = τ . dα<br />
= dα<br />
a<br />
ds<br />
d α =<br />
R<br />
dτ<br />
dτ<br />
dτ<br />
dα<br />
ds 1 v<br />
o = .( − ρ) = .( − ρ) = ( − ρ ) = . ( − ρ) = .( − ρ)<br />
dt<br />
dt<br />
- pre zrýchlenie platí:<br />
dt<br />
dt<br />
2<br />
dv v<br />
( − ρ) = τ − ρ<br />
dv dτ<br />
dv v<br />
a = τ + v = τ + v<br />
dt dt dt R dt R<br />
- tangenciálne (dotyčnicové) zrýchlenie:<br />
o pôsobí v smere dotyčnice, mení veľkosť (obvodovej) rýchlosti<br />
o a t<br />
dv<br />
=<br />
dt<br />
- normálové (dostredivé) zrýchlenie:<br />
o pôsobí v kolmom smere na smer rýchlosti, mení smer rýchlosti<br />
o<br />
2<br />
v<br />
a n<br />
=<br />
R<br />
- veľkosť celkového zrýchlenia:<br />
o<br />
a = +<br />
2 2<br />
a t<br />
a n<br />
dt<br />
R<br />
R<br />
τ<br />
a<br />
t<br />
τ<br />
a<br />
τ<br />
ds<br />
d α<br />
a<br />
n<br />
ρ<br />
d τ<br />
ρ<br />
1.5 uhlová rýchlosť a uhlové zrýchlenie<br />
- uhlová rýchlosť:<br />
dα<br />
−1<br />
o ω = , [ ω ] = s<br />
dt<br />
- uhlové zrýchlenie:<br />
2<br />
dω<br />
d α<br />
−2<br />
o ε = = , [ ε ] = s<br />
2<br />
dt dt<br />
- uhlová rýchlosť súvisí s obvodovou rýchlosťou pohybujúceho sa <strong>bodu</strong> vzťahom:<br />
3
o v = Rω<br />
, kde R je príslušný polomer krivosti<br />
- pre obvodovú rýchlosť platí:<br />
ds<br />
o v =<br />
dt<br />
- pre a<br />
t<br />
platí:<br />
o a t<br />
= Rε<br />
1.6 niektoré druhy pohybov<br />
1.6.1 rovnomerný priamočiary pohyb<br />
- pre rýchlosť zrýchlenie a dráhu platí:<br />
o v = konšt.<br />
dv<br />
o a = = 0 dt<br />
v<br />
s<br />
s<br />
o s ∫ v. dt = vt + s<br />
=<br />
0<br />
, kde s 0 je dĺžka<br />
t<br />
t<br />
dráhy v čase t=0<br />
1.6.2 rovnomerne zrýchlený priamočiary pohyb<br />
- pre zrýchlenie, rýchlosť a dráhu platí:<br />
v<br />
o a = konšt.<br />
o v ∫ a. dt = at + v , kde v 0 je začiatočná<br />
=<br />
0<br />
rýchlosť<br />
s<br />
1 2<br />
o s = ∫ v. dt = ∫ ( at + v ) dt = at + v0t<br />
+ s0<br />
2<br />
t<br />
t<br />
- ak a
- frekvencia f:<br />
o počet obehov za jednotku času<br />
1 ω<br />
o f = = T 2π<br />
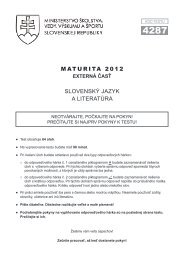
- iné odvodenie normálového (dostredivého) zrýchlenia:<br />
o za dobu ∆t hmotný bod prejde oblúk dĺžky ∆ s = R.<br />
∆ϕ<br />
,<br />
ktorému zodpovedá uhol ∆ ϕ = ω.<br />
∆t<br />
o pre zmenu okamžitej rýchlosti v dôsledku zmeny jej smeru<br />
platí:<br />
2<br />
v<br />
- ∆ v = v.<br />
∆ϕ = v.<br />
ω.<br />
∆t<br />
= . ∆t<br />
a z toho<br />
R<br />
2<br />
2<br />
∆v<br />
v<br />
2 4π<br />
- a d<br />
= = = vω = ω R = R<br />
2<br />
∆t<br />
R<br />
T<br />
1.6.4 rovnomerne zrýchlený pohyb po kružnici<br />
- pre uhlové zrýchlenie, uhlovú rýchlosť a uhol platí:<br />
o ε = konšt.<br />
o ω ∫ ε. dt = εt<br />
+ ω<br />
=<br />
0<br />
1<br />
. α<br />
2<br />
2<br />
∫ ∫ 0<br />
dt = εt<br />
+ ω<br />
0t<br />
+<br />
o α ω dt = ( εt<br />
+ ω )<br />
=<br />
0<br />
∆φ<br />
∆v<br />
v B ∆φ v ' A<br />
B<br />
R<br />
∆s<br />
a d A<br />
v A<br />
5