Uvodno predavanje
Uvodno predavanje
Uvodno predavanje

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
1. UVOD<br />
Teorija elastičnosti i plastičnosti ili mehanika čvrstog deformabilnog tijela je dio šireg pojma<br />
mehanike kontinuuma. Bavi se proučavanjem stanja naprezanja i deformacija koja nastaju kao<br />
poslijedica djelovanja vanjskih i unutarnjih sila na čvrsto deformabilno tijelo. U daljnjim<br />
razmatranjima umjesto ‘čvrsto deformabilno tijelo’ često će se koristiti izraz „realno čvrsto<br />
tijelo“ ili samo‘tijelo’. Realno čvrsto tijelo je dio materijalnog kontinuuma koji se giba i<br />
deformira pod djelovanjem vanjskog opterećenja.<br />
Postoje dva osnovna pristupa u proučavanju ponašanja tijela pod vanjskim opterećenjem. To<br />
su: mikroskopski i makroskopski.<br />
Mikroskopski pristup proučavanja tijela uzima u obzir atomsku i molekularnu strukturu<br />
materije, te ponašanje tijela postavlja na mikrorazini.<br />
Makroskopski pristup podrazumijeva tijelo sastavljeno od makro čestica kao djelova<br />
materjalnog kontinuuma sastavjlenih od skupine molekula, a proučavanje deformacije tijela<br />
svodi na makrorazinu. Pri tome se smatra da makro čestice potpuno i neprekidno ispunjavaju<br />
dio prostora, te su meñusobno čvrsto povezane bez pukotina. Tijelo je dakle sastavljeno od<br />
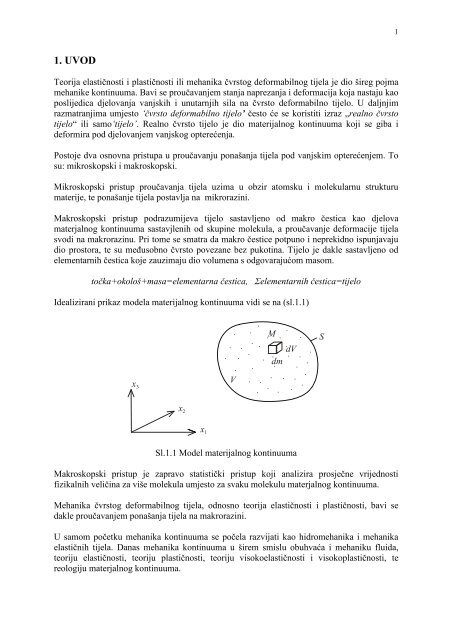
elementarnih čestica koje zauzimaju dio volumena s odgovarajućom masom.<br />
točka+okološ+masa=elementarna čestica, Σelementarnih čestica=tijelo<br />
Idealizirani prikaz modela materijalnog kontinuuma vidi se na (sl.1.1)<br />
x 3<br />
x 2<br />
x 1<br />
.<br />
. . .<br />
. M . .<br />
.<br />
. . . .<br />
. dV .<br />
. . .<br />
. . .<br />
dm<br />
. . .<br />
.<br />
.<br />
.<br />
.<br />
V .<br />
.<br />
.<br />
.<br />
.<br />
.<br />
. . .<br />
Sl.1.1 Model materijalnog kontinuuma<br />
Makroskopski pristup je zapravo statistički pristup koji analizira prosječne vrijednosti<br />
fizikalnih veličina za više molekula umjesto za svaku molekulu materjalnog kontinuuma.<br />
Mehanika čvrstog deformabilnog tijela, odnosno teorija elastičnosti i plastičnosti, bavi se<br />
dakle proučavanjem ponašanja tijela na makrorazini.<br />
U samom početku mehanika kontinuuma se počela razvijati kao hidromehanika i mehanika<br />
elastičnih tijela. Danas mehanika kontinuuma u širem smislu obuhvaća i mehaniku fluida,<br />
teoriju elastičnosti, teoriju plastičnosti, teoriju visokoelastičnosti i visokoplastičnosti, te<br />
reologiju materjalnog kontinuuma.<br />
S<br />
1
U klasičnoj mehanici kontinuuma, a posebno u teoriji elastičnosti uglavnom se pretpostavlja<br />
da je materijal elastičan „izotropan“ i „homogen“. Izotropan znači da su mu elastična<br />
svojstva u svim smjerovima jednaka, a homogen da su mu elastična svojstva u svim točkama<br />
jednaka. Anizotropija podrazumjeva različita elastična svojstva u različitim smjerovima, dok<br />
nehomogenost znači nejednaka elastična svojstva u točkama tijela.<br />
Teorija elastičnosti i plastičnosti kao dio mehanike kontinuuma u užem smislu proučavaju<br />
zavisnost izmeñu vanjskih i unutarnjih sila, te pomaka i deformacija realnih čvrstih tijela.<br />
Opća rješenja ovakvih ovisnosti za slučajeve složenih oblika tijela u strogom matematičkom<br />
smislu teško se mogu dobiti zbog složenosti matematičkog aparata. Tek je jedan dio problema<br />
teorije elastičnosti i plastičnosti s jednostavnijim oblicima kontura riješen u zatvorenome<br />
matematičkoj formi. Složenije probleme moguće je rješavati numeričkim i eksperimentalnim<br />
postupcima koji se danas u tom smislu intenzivno razvijaju.<br />
Linearna teorija elastičnosti bavi se proučavanjem naprezanja i deformacija uzrokovanih<br />
vanjskim silama i to za slučaj njihove linearne povezanosti. S druge pak strane nelinearna<br />
teorija elastičnosti proučava probleme s nelinearnom vezom izmeñu naprezanja i deformacija<br />
unutar realnog čvrstog tijela. Tu svakako spadaju problemi velikih defornacija kao i problemi<br />
stabilnosti.<br />
Teorija plastičnosti, takoñer, kao uža disciplina mehanike kontinuuma proučava uvjete pojave<br />
plastičnosti te vezu izmeñu plastičnih deformacija i odgovarajućih naprezanja. U ovom<br />
slučaju, dakako, postoje još veće poteškoće u matematičkoj formulaciji i rješavanju<br />
odgovarajućih problema u zatvorenoj matematičkoj formi.<br />
Teorija visokoelastičnosti i visokoplastičnosti proučava zakonitosti nastanka i razvoja<br />
deformacija čvrstog tijela u ovisnosti o vremenu. U svojim postavkama služi se različitim<br />
idealiziranim modelima elastičnih i viskoznih svojstava, te uglavnom ostaje na razini teorije.<br />
Treba takoñer spomenuti da se paralelno s razvojem teorijske mehanike kontinuuma razvijala<br />
i eksperimentalna mehanika kontinuuma koja je svoj smisao nalazila u verifikaciji raznih<br />
analitičkih i numeričkih modela.<br />
U povjesnome razvoju mehanike kontinuuma sudjelovali su mnogi znanstvenici, no ipak treba<br />
istaknuti neka značajnija imena kao: Arhimed, Galilei, Hooke, Navier, Stokes, St. Venant,<br />
Poisson, Cauchy, Newton, Lagrange, Euler, Bernoulli, Young, Pascal, Maxwell, Laplace,<br />
Prandtl, Kirchhoff, Von Mises, Hencky, Reuss, Boltzman, Kelvin, Prager, Von Karman,<br />
Reynolds, Green, Reissner, Ritz, Galerkin, Rabotnov, Iljušin, Timošenko, Treuesdell itd.<br />
2
2. ELEMENTI VEKTORSKOG I TENZORSKOG RAČUNA<br />
Mehanika kontinuuma pa tako i teorija elastičnosti radi s fizikalnim veličinama koje ne ovise<br />
o izboru koordinatnog sustava. Meñutim iako same fizikalne veličine ne ovise o izboru<br />
koordinatnog sustava, ipak njihove pojedine komponente ovise o njegovu izboru. Takve se<br />
veličine u mehanici kontinuuma zovu „tenzori“. Ako su poznate komponente tenzora u<br />
jednom koordinatnom sustavu mogu se pomoću izraza za transformaciju odrediti komponente<br />
tenzora u drugom, zarotiranom koordinatnom sustavu.<br />
U teoriji elastičnosti uglavnom se bavimo trodimenzionalnim „Euklidovim vektorskim<br />
prostorom“ E, 3 u kojem je definirana udaljenost izmeñu točaka i kut u smislu skalarnog<br />
produkta, dakle metrika, a zove se Euklidov „metrički prostor“. To je trodimenzionalni<br />
r r r<br />
vektorski prostor omeñen koordinatnim bazičnim vektorima ( e1<br />
, e2<br />
, e3<br />
) koji moraju biti<br />
nekomplanarni i različiti od nulvektora. Ovi vektori čine bazu trodimenzionalnog vektorskog<br />
prostora E 3 koja općenito nije ortogonalna. Svaki vektor u toj bazi može se prikazati kao<br />
r r r<br />
linearna kombinacija bazičnih vektora ( e1<br />
, e2<br />
, e3<br />
). Tako se primjerice radijus vektor r točke<br />
M u prostoru E 3 (Sl 2.1) može napisati u obliku.<br />
x1<br />
r<br />
M<br />
r r r<br />
= x e + x e + x e<br />
(2.1)<br />
e1<br />
1M<br />
e3<br />
1<br />
x3<br />
x1M<br />
2M<br />
r<br />
e2<br />
2<br />
M<br />
x3M<br />
3M<br />
3<br />
x2M<br />
Sl. 2.1 Baza vektorskog prostora<br />
Gdje su: x1M e1rM r r<br />
= , x2M e2rM r r<br />
= , x3M e3rM r r<br />
= koeficijenti linearne kombinacije ili komponente<br />
radijus vektora r u smjeru odgovarajućih bazičnih vektora, odnosno koordinate točke M.<br />
2.1 Kosokutni bazični vektori i metrički tenzori<br />
Kako bismo općenito objasnili linearne transformacije u Euklidovu vektorskom prostoru E 3 ,<br />
promotrimo opću kosokutnu bazu sastavljenu od tri nekomplanarna vektora, 2 3 ,e e e<br />
r r r<br />
( 1 , ) tako da<br />
r r r r<br />
je e1<br />
≠ e2<br />
≠ e3<br />
≠ o i u njoj radijus vektor r 1 2 3<br />
s koordinatama vrha ( x , x , x ), pri čemu su<br />
r r r<br />
(1,2,3) gornji indeksi i nemaju značenje eksponenata. Bazične vektore ( e1,<br />
e2<br />
,e3)<br />
zovemo<br />
kovarijantnim vektorima s indeksom dolje (Sl.2.2).<br />
x2<br />
3
Radijus vektor u toj bazi izgleda<br />
0<br />
e 3<br />
e 2<br />
e 1<br />
x 3<br />
Sl. 2.2. Opća kosokutna baza i koordinate<br />
x 2<br />
r 3<br />
1r<br />
2r<br />
3r<br />
nr<br />
= x e1<br />
+ x e2<br />
+ x e3<br />
= ∑ x e<br />
n=<br />
1<br />
1 2 3<br />
Koordinate ( x , x , x ) zovemo opće kosokutne koordinate ili „kontravarijantne koordinate“,<br />
označene s indeksima gore, dok će „kovarijantne koordinate“ biti označene s indeksima dolje.<br />
Izraz (2.2) možemo u skladu s „Einsteinovom konvencijom“ o indeksnom zapisivanju napisati<br />
jednostavnije ispuštajući sumu i oznaku strelice iznad vektora kojeg ćemo označiti<br />
podebljanim, odnosno boldanim slovom.<br />
n<br />
x 1<br />
4<br />
(2.2)<br />
n<br />
r = x en;<br />
( n = 1,<br />
2,<br />
3)<br />
(2.3)<br />
Možemo sada napisati meñusobne skalarne produkte bazičnih vektora. Prema Einsteinovoj<br />
konvenciji skalarni produkti bazičnih vektora em i e n mogu se napisati u obliku:<br />
e ⋅e = g ; ( m, n = 1,2,3) , ili po pojedinim komponentama i matrično kao:<br />
m<br />
n<br />
mn<br />
2<br />
2<br />
2<br />
e 1 ⋅ e1<br />
= (e1)<br />
= g11<br />
e 2 ⋅ e2<br />
= (e2<br />
) = g22<br />
e 3 ⋅ e3<br />
= ( e3<br />
) = g33<br />
e 1 ⋅ e2<br />
= e2<br />
⋅ e1<br />
= g 12 = g<br />
e ⋅ e = e ⋅ e = g = g<br />
2<br />
3<br />
3<br />
1<br />
3<br />
1<br />
2<br />
3<br />
23<br />
e ⋅ e = e ⋅ e = g = g<br />
31<br />
21<br />
32<br />
13<br />
⎡g<br />
11 g12<br />
g13<br />
⎤<br />
g =<br />
⎢<br />
⎥<br />
mn ⎢<br />
g21<br />
g22<br />
g23<br />
⎥<br />
(2.4)<br />
⎢⎣<br />
g<br />
⎥<br />
31 g32<br />
g33<br />
⎦<br />
gdje je g mn - „metrički tenzor“ drugog reda kovarijantnog tipa.<br />
Veličinom g mn odreñene su duljine i kutevi izmeñu koordinatnih vektora ( e 1,e2,e3) , jer<br />
vrijedi:
e m = gmm<br />
, odnosno, n = gnn<br />
e e )<br />
e<br />
⋅ e<br />
e , (norma ili duljina bazičnih vektora)<br />
g<br />
m n<br />
mn<br />
cos( m , n = =<br />
(kutevi izmeñu bazičnih vektora)<br />
em<br />
⋅ en<br />
gmm<br />
gnn<br />
5<br />
(2.5)<br />
(2.6)<br />
Uvedimo sada novi kosokutni koordinatni sustav s istim ishodištem u odnosu na prethodni, a<br />
1 2 3<br />
sastoji od koordinatnih vektora ( e , e , e ). Novi sustav je „recipročan“ sustavu ( e 1 , e2<br />
, e3<br />
) s<br />
uvjetima recipročnosti kako slijede:<br />
e<br />
1<br />
=<br />
e<br />
×<br />
e<br />
2 3<br />
( e1,e2,e3<br />
)<br />
2 3<br />
e × e<br />
e1<br />
= 1 2 3<br />
( e ,e ,e )<br />
e<br />
e<br />
2<br />
2<br />
=<br />
e<br />
×<br />
e<br />
3 1<br />
( e1,e2,e3<br />
3<br />
e × e<br />
= 1 2<br />
( e ,e ,e<br />
V )<br />
) ( = × ⋅<br />
e ,e ,e e e<br />
i<br />
= 1 2 3 1 ( 2 e3<br />
V ⋅V<br />
1<br />
1<br />
1<br />
1<br />
3<br />
)<br />
)<br />
e<br />
e<br />
3<br />
3<br />
=<br />
e<br />
×<br />
e<br />
1 2<br />
( e1,e2,e3<br />
1<br />
e × e<br />
= 1 2<br />
( e ,e ,e<br />
1 2 3 1 2 3<br />
( e ,e ,e ) = e ⋅ ( e × e ) = V<br />
1 2 3<br />
= ( e1 ,e2,e3<br />
)( e ,e ,e ) = 1;<br />
(uvjet recipročnosti baza) (2.7)<br />
V1 i V 1 su volumeni paralelopipeda razapetih nad osnovnom i recipročnom bazom. U novom<br />
recipročnom koordinatnom sustavu definirene su komponente novog kontravarijantnog<br />
metričkog tenzora recipročnog sustava u obliku:<br />
e<br />
m<br />
⋅ e<br />
n<br />
= g<br />
mn<br />
;<br />
2<br />
3<br />
)<br />
)<br />
mn nm<br />
g = g<br />
(2.8)<br />
Ako se napravi skalarni produkt baznih vektora osnovnog i recipročnog koordinatnog sustava<br />
dobiva se:<br />
n n ⎧1.......m<br />
= n<br />
e m ⋅ e = δ m = ⎨<br />
(2.9)<br />
⎩0......m<br />
≠ n<br />
što pretstavlja novi mješoviti metrički tenzor drugog reda ili „Kroneckerov tenzor“ drugog<br />
reda. Kao što se vidi on je kovarijantan i kontravarijantan.<br />
Radijus vektor u recipročnom koordinatnom sustavu izgleda<br />
r =<br />
1 2 3 m<br />
= x1e + x2e<br />
+ x3e<br />
xme<br />
(2.10)<br />
Iz jednakosti radijus vektora u oba sustava dobivamo vezu izmeñu kovarijantnih i<br />
kontravarijantnih koordinata u obliku:<br />
1
Analogno jednadžbi (2.11) imamo relaciju<br />
1 2 3<br />
1 2 3<br />
x e 1 + x e2<br />
+ x e3<br />
= x1<br />
e + x2e<br />
+ x3e<br />
/ e2<br />
1 2 3<br />
x g12<br />
+ x g22<br />
+ x g32<br />
=<br />
x<br />
2<br />
n<br />
x m = x g nm<br />
(2.11)<br />
m nm<br />
x = xn<br />
g<br />
(2.12)<br />
Jednadžbama (2.11) i (2.12) pokazane su veze izmeñu kovarijantnih i kontravarijantnih<br />
koordinata vektora u osnovnom i recipročnom sustavu.<br />
Na sličan način se može izvesti veza izmeñu samih koordinatnih vektora odnosno baznih<br />
vektora osnovnog i recipročnog sustava:<br />
m mn<br />
e = g en<br />
i<br />
e = (2.13)<br />
n<br />
m gmne kao i veza izmeñu metričkih tenzora osnovnog i recipročnog sustava u obliku:<br />
g<br />
G<br />
g<br />
gdje su: g − determinanta od g mn , ili<br />
G<br />
g<br />
1<br />
g<br />
mn<br />
mn<br />
= ; g mn = mn = , mn<br />
2<br />
g = ( e , e , e ) = ( V )<br />
1<br />
2<br />
3<br />
1<br />
2<br />
= e e e<br />
, 1 2 3 2 1 2<br />
g ( , , ) = ( V )<br />
V1 = g - volumen paralelopipeda nad ( e , e , e ) baznim vektorima,<br />
,<br />
g<br />
V 1 1 2 3<br />
= - volumen paralelopipeda nad ( e , e , e ) baznim vektorima,<br />
g<br />
mn ps pt<br />
G = -kofaktori u determinanti g metričkog tenzora mn<br />
g<br />
rs<br />
g<br />
g<br />
rt<br />
g<br />
11 22 23<br />
G = ,<br />
g<br />
32<br />
g<br />
g<br />
33<br />
g<br />
12 23 21<br />
G = ,<br />
2.1.1. Skalarni produkt vektora u kosokutnim sustavima<br />
g<br />
33<br />
g<br />
g<br />
31<br />
1<br />
2<br />
3<br />
g , na primjer<br />
g<br />
31<br />
32<br />
6<br />
13 21 22<br />
G = (2.14.)<br />
Metrički vektorski prostor po svojim osnovnim svojstvima podrazumijeva definiciju<br />
skalarnog produkta. Prema tome za bilo koja dva vektora a i b vrijedi:<br />
m<br />
n<br />
u osnovnoj bazi ( e 1 , e2<br />
, e3)<br />
; a = a em<br />
i b = b en<br />
m n<br />
m n<br />
a ⋅ b = ( a em<br />
)( b en<br />
) = gmna<br />
b<br />
(2.15)<br />
g<br />
g<br />
g
1 2 3<br />
u recipročnoj bazi ( e , e , e ) ;<br />
m<br />
a = ame i<br />
1 2 3<br />
m<br />
u obje baze ( e 1 , e2<br />
, e3)<br />
i ( e , e , e ) ; a = a em<br />
; i<br />
b = b e<br />
n<br />
n<br />
m n mn<br />
a ⋅b = (a me<br />
)(bne<br />
) = g ambn<br />
(2.16)<br />
m<br />
(a em<br />
)(bn<br />
n<br />
) =<br />
m n<br />
(a me<br />
)(b n ) =<br />
a ⋅b = e<br />
b = b e<br />
n<br />
n<br />
a b δ<br />
m n<br />
n m<br />
a ⋅ b = e a b δ<br />
(2.17)<br />
m<br />
n m<br />
n<br />
1 2 3<br />
U slučaju da su baze ( e e , e ) i ( e , e , e ) ortonormirane biti će:<br />
g mn = mn<br />
g =<br />
1,<br />
2 3<br />
mn<br />
δ mn = δ ; 1<br />
m<br />
m<br />
g = ; x = xn<br />
; a = an<br />
2.2. Transformacije baza s istim ishodištem<br />
⎧=<br />
0....m ≠ n<br />
δmn ⎨<br />
(2.18)<br />
⎩=<br />
1....m = n<br />
Promatramo općenito dvije kosokutne baze s istim ishodištem. Prva s bazičnim vektorima<br />
1 2 3<br />
( e 1 , e2<br />
, e3)<br />
i sustavom koordinata radijus vektora ( x , x , x ) . Druga s bazičnim vektorima<br />
1 2 3<br />
( e '1 , e'2<br />
, e'3<br />
) i sustavom koordinata ( x ' , x'<br />
, x'<br />
) . Obje baze pripadaju Euklidovu vektorskom<br />
prostoru E 3 , i nisu meñusobno recipročne (Sl.2.3).<br />
x 3<br />
x 3<br />
e 3<br />
e 3<br />
e 2<br />
x 2<br />
e 2<br />
e 1<br />
Sl. 2.3. Kosokutne baze s istim ishodištem<br />
Kontravarijantne koordinate jednog sustava izražavaju se kontravarijantnim koordinatama<br />
drugog sustava linearnim vezama u obliku:<br />
e 1<br />
x 2<br />
x 1<br />
x 1<br />
7
n n m<br />
x' = αmx<br />
n n m<br />
x = α'm<br />
x'<br />
(2.19)<br />
gdje su:<br />
n<br />
αm − koeficijent direktne transformacije iz sustava ( e 1 , e2<br />
, e3)<br />
u sustav<br />
( e '1 , e'2<br />
, e'3<br />
) , −<br />
n<br />
( e 1 , e2<br />
, e3)<br />
.<br />
α'm koeficijenti obratne transformacije iz sustava ( e '1 , e'2<br />
, e'3<br />
) u sustav<br />
Analogno izrazu (2.19) kovarijantne komponente jednog sustava izražavaju se pomoću<br />
kovarijantnih komponenata drugog sustava linearnim vezama u obliku:<br />
x' = α'<br />
n<br />
n<br />
m<br />
n<br />
m<br />
n<br />
x<br />
m<br />
x = α x'<br />
(2.20)<br />
Na isti se način transformiraju i bazični vektori ( e 1 , e2<br />
, e3)<br />
i ( e'1 , e'2<br />
, e'3<br />
) kao:<br />
kontravarijantne komponente<br />
kovarijantne komponente<br />
e ' = e<br />
i i<br />
αk<br />
k<br />
α' ' e<br />
m<br />
k<br />
i i k e = k<br />
i i k<br />
2.2.1. Značenje koeficijenata transformacije<br />
i i k<br />
e = α'k e'<br />
(2.21)<br />
8<br />
e = α e'<br />
(2.22)<br />
Neka je zadan vektor a. Suma umnožaka njegovih komponenata u osnovnom i zaokrenutom<br />
sustavu je jednaka, pa vrijedi<br />
Pomnožimo li lijevu i desnu stranu sa<br />
k i<br />
a k a' e'i<br />
e = (2.23)<br />
i<br />
e' dobivamo:<br />
i k i<br />
a' = a ( e k ⋅ e'<br />
i k<br />
) = αka<br />
i<br />
α k<br />
i<br />
= ek ⋅ e'<br />
(2.24)<br />
Koeficijenti direktne transformacije pretstavljaju umnoške bazičnih vektora osnovnog sustava<br />
i bazičnih vektora recipročnog zaokrenutog sustava. Na sličan način dolazimo do veze<br />
k k<br />
α'i e ⋅ e'i<br />
= (2.25)<br />
Vidimo da koeficijenti obratne transformacije pretstavljaju umnoške bazičnih vektora<br />
recipročnog osnovnog sustava i zaokrenutog sustava. Umnožak koeficijenta direktne i obratne<br />
transformacije jednak je Kroneckerovu tenzoru pa imamo:
k i<br />
α'i<br />
αk<br />
= 1 (za i=k )<br />
k i<br />
α'i<br />
αk<br />
= 0 (za i≠k ) (2.26)<br />
2.2.2. Transformacije metričkih tenzora u kosokutnim sustavima<br />
Neka su zadani vektori a i b sa kontravarijantnim komponentama u osnovnom i zaokrenutom<br />
sustavu. Njihov skalarni produkt iražem preko metričkih tenzora u oba sustava izgleda:<br />
u osnovnom sustavu s bazičnim vektorima ( e 1 , e2<br />
, e3)<br />
u zaokrenutom sutsavu s bazičnim vektorima ( e '1 , e'2<br />
, e'3<br />
)<br />
k<br />
a<br />
k i<br />
= α 'i a'<br />
i<br />
s s r<br />
b = α'r<br />
b'<br />
k s<br />
ks b a g = a ⋅ b<br />
(2.27)<br />
'<br />
i<br />
a<br />
i k<br />
α ka<br />
i<br />
r r s<br />
b = α sb<br />
i r<br />
a ⋅ b = g'ir a'<br />
b'<br />
(2.28)<br />
= '<br />
skalarni produkt tih vektora je isti u oba koordinatna sustava, pa vrijedi jednakost<br />
pa na temelju (2.27) i (2.28), zamjenom<br />
koeficijenata obratne transformacije dobivamo:<br />
izmjenom mjesta izraz (2.30) postaje<br />
odnosno, konačno<br />
a<br />
k s<br />
i r<br />
gksa b = g'ir<br />
a'<br />
b'<br />
(2.29)<br />
k 'k<br />
'i<br />
= α i a i<br />
k<br />
a i<br />
s<br />
b odgovarajućim izrazima pomoću<br />
s<br />
b =<br />
α<br />
b<br />
' s ' r<br />
r<br />
k i s r<br />
i r<br />
ksα<br />
' i a'<br />
α'r<br />
b'<br />
= g'ir<br />
a'<br />
b<br />
(2.30)<br />
g '<br />
k s i r<br />
i r<br />
g α ' α'<br />
( a'<br />
b'<br />
) = g'<br />
( a'<br />
b'<br />
)<br />
(2.31)<br />
ir<br />
ks<br />
i<br />
k<br />
i<br />
r<br />
s<br />
r<br />
ks<br />
ir<br />
g' = α' α' g (2 × kovarijantan) (2.32)<br />
Gdje su: ir<br />
g' - metrički tenzor zaokrenutog transformiranog sustava, a ks<br />
g - metrički tenzor<br />
osnovnog sustava. Izraz (2.32) pokazuje zakonitost transformacije kovarijantnih komponenata<br />
metričkog tenzora zaokrenutog transformiranog sustava preko kovarijantnih komponenata<br />
metričkog tenzora osnovnog sustava. Na analogan način mogu se napisati i slijedeće<br />
transformacije komponenata metričkih tenzora:<br />
9
ir i<br />
' = α k<br />
r ks<br />
s g (2×kontravarijantan)<br />
ir i r ks<br />
= α'k<br />
α'<br />
s g (2×kontravarijantan)<br />
g α<br />
g '<br />
g = α α g'<br />
(2×kovarijantan) (2.33)<br />
ir<br />
k<br />
i<br />
s<br />
r<br />
ks<br />
Isto tako vrijedi zakonitost transformacije mješovitih komponenata metričkog tenzora drugog<br />
reda u obliku<br />
g' = α' α g (1×kovarijantan i 1×kontravarijantan) (2.34)<br />
i<br />
r<br />
s<br />
r<br />
i<br />
k<br />
k<br />
s<br />
Kako se bilo koji tenzor drugog reda unutar dvaju opisanih kosokutnh sustava transformira po<br />
zakonu metričkih tenzora, općenito vrijedi:<br />
Veličine ik T i T' ik (i,k=1,2,3) tvori kovarijantni tenzor drugog reda ako se kod afine<br />
transformacije izmeñu dvaju koordinatnih sustava transformiraju prema:<br />
T = α α T' (2 x kovarijantan)<br />
ik<br />
ik<br />
m<br />
i<br />
m<br />
i<br />
n<br />
k<br />
n<br />
k<br />
mn<br />
T' = α' α' T (2×kovarijantan) (2.35)<br />
mn<br />
ik ik<br />
Veličine T i T' (i,k=1,2,3) tvore kontravarijantne tenzore drugog reda ako se kod afine<br />
transformacije izmeñu dvaju kosokutnih sustava s istim ishodištem transformirju prema:<br />
ik i k mn<br />
T = α'm<br />
α'n<br />
T' (2 x kontravarijantan)<br />
ik i k mn<br />
T' = αmαnT<br />
(2×kontravarijantan) (2.36)<br />
i<br />
Veličina T' k (i,k=1,2,3) tvori (1×kontravarijantni) i (1×kovarijantni) tenzor drugog reda ako<br />
se pri transformaciji izmeñu dva sustava s istim ishodištem transformira prema<br />
T' = α α' T (1 x kovarijantan i 1 x kontravarijantan) (2.37)<br />
i<br />
k<br />
i<br />
m<br />
n<br />
k<br />
m<br />
n<br />
analogno tome transformiraju se mješoviti tenzori trećeg reda kao<br />
T ' = α' α'<br />
α T (2×kovarijantan i 1×kontravarijantan) (2.38)<br />
i<br />
kr<br />
m<br />
k<br />
n<br />
r<br />
i s<br />
s mn<br />
ili općenito tenzori viših redova, na primjer petog reda.<br />
T' = α' α'<br />
α'<br />
α α T (3 x kovarijantan i 2 x kontravarijantan) (2.39)<br />
ij<br />
pqr<br />
m<br />
p<br />
n<br />
q<br />
t<br />
r<br />
i<br />
k<br />
j kl<br />
l mnt<br />
U trodimenzionalnom vektorskom prostoru broj komponenata tenzora je<br />
red tenzora.<br />
10<br />
n<br />
3 gdje n znači n-ti<br />
Tako skalar kao tenzor nultog reda ima jednu komponentu: 1<br />
3 0 = , a pomoću njega se opisuje<br />
temperatura, gustoća ili masa u nekoj točki prostora.
Vektor kao tenzor prvog reda ima 3 komponente: 3 3<br />
1 = , pomoću njega se opisuje npr. sila,<br />
brzina, ubrzanje itd.<br />
Tenzor drugog reda ima 9 komponenata ( 2<br />
3 =9), a koristimo ga za opisivanje naprezanja ili<br />
deformacija u E 3 prostoru. Pomoću tenzora drugog reda opisuju se i momenti tromosti u E 3<br />
prostoru.<br />
Postoje pojave koje se opisuju tenzorima viših redova kao primjerice tenzor elastičnosti je<br />
četvrtog reda, koji za opće anizotropno tijelo ima 81 komponentu 3 81<br />
4 = itd. Meñutim broj<br />
komponenata nije isključivo mjerodavan za procjenu je li neka veličina tenzor ili nije, nego<br />
način i zakonitost transformacije njegovih komponenata.<br />
2.3. Opći tenzori i transformacije krivocrtnih koordinata<br />
Neka su u Euklidovu E 3 1 2 3<br />
prostoru date koordinate neke točke ( x , x , x ) = x i .<br />
Uvedemo li nove promjenjene koordinate te točke<br />
koordinatama povezane relacijom:<br />
1 2 3<br />
( x' , x'<br />
, x'<br />
) '<br />
11<br />
k<br />
= x koje su sa starim<br />
k k 1 2 3 'k<br />
i<br />
x ' = x'<br />
( x , x , x ) = x ( x )<br />
(2.40)<br />
k<br />
Funkcije koordinata x' su kontinuirane i imaju parcijalne derivacije 1. reda, tako da je<br />
Jacobieva determinanta transformacije iz jdnih koordinata u druge „Jacobiana“ različita od<br />
nule, odnosno vrijedi<br />
k<br />
∂x'<br />
J = ≠ 0<br />
(2.41)<br />
i<br />
∂x<br />
Ako vrijedi izraz (2.41), odnosno, ako je Jacobieva detetminanta različita od nule, tada postoji<br />
i inverzno preslikavanje i vrijedi:<br />
0<br />
e 3<br />
e 2<br />
e 1<br />
x 3<br />
x 2<br />
i i 1 2 3 i 'k<br />
x = x ( x'<br />
, x'<br />
, x'<br />
) = x ( x )<br />
(2.42)<br />
x 1<br />
0<br />
e 3<br />
e 2<br />
Sl. 2.4. Transformacija krivocrtnih koordinata<br />
e 1<br />
x 3<br />
x 1<br />
x 2
Sada promotrimo transformaciju diferencijala izraza (2.40) koji izgleda<br />
dx<br />
∂x'<br />
∂x<br />
12<br />
k<br />
' =<br />
k<br />
i<br />
i<br />
dx<br />
(2.43)<br />
Izraz (2.43) pretstavlja transformaciju kontravarijantnih komponenata tenzora prvog reda<br />
odnosno vektora. Koeficijenti transformacije su parcijalne derivacije jednih koordinata po<br />
i<br />
drugima. Vrijedi takoñer općenito, ako imamo skup veličina b koje čine komponente vektora<br />
b u koordinatnom sustavu x ( i = 1,<br />
2,<br />
3)<br />
i<br />
, kažemo da je definiran tenzor prvog reda, ako se<br />
komponente<br />
i<br />
b transformiraju u sustav komponenata<br />
b<br />
∂x'<br />
∂x<br />
k<br />
b' po zakonu<br />
k<br />
' =<br />
k<br />
i<br />
i<br />
b<br />
(2.44)<br />
Logičnom ekstenzijom općeg tenzorskog koncepta (2.44) može se definirati i opći<br />
kontravarijantni tenzor drugog reda kao<br />
B<br />
∂x'<br />
∂x<br />
∂x'<br />
∂x<br />
k j<br />
kj<br />
' = r s<br />
rs<br />
B<br />
(2.45)<br />
Na analogan način se dobiju i opći tenzori viših redova kao na pr. trećeg reda u obliku<br />
T<br />
∂x'<br />
∂x<br />
∂x'<br />
∂x<br />
∂x'<br />
∂x<br />
k j m<br />
kjm<br />
' = r s<br />
rsq<br />
T q<br />
(2.46)<br />
Analognim pristupom dobiva se zakon transformacije kovarijantnih komponenata općeg<br />
tenzora u obliku:<br />
b'<br />
∂x<br />
∂x'<br />
∂x<br />
∂x'<br />
∂x<br />
∂x'<br />
∂x<br />
∂x<br />
∂x<br />
= (2.47)<br />
∂x'<br />
∂x'<br />
∂x'<br />
i<br />
r s<br />
r s q<br />
k = b k i B'kj<br />
= k B j rs T 'kjm<br />
k j T m rsq<br />
2.3.1. Opći metrički tenzor<br />
i<br />
Neka x predstavlja sistem koordinata u Euklidovu E 3 k<br />
prostoru, a x' neka pretstavlja sistem<br />
novih koordinata koji su funkcijski povezane sa starim. Neka je x vektor pozicije točke<br />
1 2 3<br />
P ( x , x . x ) u odnosu na početni koordinatni sustav. Kvadrat diferencijala koji predstavlja<br />
udaljenost točke P (x)<br />
i susjedne točke Q ( x + dx)<br />
je dan u obliku:<br />
diferencijal<br />
i<br />
dx izgleda<br />
2 i i i i 1 2 3<br />
( ds ) = dx dx ; x = x ( x'<br />
, x'<br />
, x'<br />
)<br />
(2.48)<br />
∂x<br />
dx '<br />
∂x'<br />
i<br />
=<br />
i<br />
k<br />
dx k<br />
(2.49)
Temeljem prethodnih izraza (2.48) i (2.49) možemo pisati<br />
( ds) ∂x<br />
∂x'<br />
∂x<br />
∂x'<br />
'<br />
i<br />
∂x<br />
gdje je g kl = k<br />
∂x'<br />
i<br />
∂x<br />
opći metrički tenzor pri transformaciji općih krivolinijskih koordinata.<br />
l<br />
∂x'<br />
13<br />
i i<br />
2<br />
= k l<br />
k l<br />
k l<br />
dx'<br />
dx'<br />
= gkldx'<br />
dx<br />
(2.50)<br />
Ako se transformacija odvija unutar Cartesievih ortonormiranih sustava tada vrijedi:<br />
∂x<br />
=<br />
∂x'<br />
i<br />
g kl k<br />
kl<br />
i<br />
∂x<br />
⎧1....<br />
k = l<br />
= δ = ⎨<br />
(2.51)<br />
l<br />
∂x'<br />
⎩0....<br />
k ≠ l<br />
Prethodna transformacija (2.51) je ortogonalna transformacija, a definirani tenzor drugog reda<br />
u zove se Cartesiev tenzor drugog reda.<br />
Kod Cartesievih tenzora gubi se razlika izmeñu kontravarijantnih i kovarijantnih<br />
komponenata pa se po volji mogu koristiti gornji ili donji indeksi. Najčešće u tom slučaju<br />
stavljamo indekse dolje.<br />
2.4. Cartesievi tenzori u ortogonalnim bazama i uvjeti ortogonalnosti<br />
Neka su ( O , x1,<br />
x2,<br />
x3)<br />
i ( O , x'1<br />
, x'2<br />
, x'3<br />
) zadana dva ortogonalna Cartesieva koordinatna<br />
sustava sa zajedničkim početkom u točki O . (sl.6.) Neka je koordinatni sustav<br />
( O , x'1<br />
, x'2<br />
, x'3<br />
) dobiven iz osnovnog ( O , x1,<br />
x2,<br />
x3)<br />
rotacijom oko točke O . Kosinusi kuteva<br />
izmeñu i -tih početnih i j -tih zarotiranih koordinatnih osiju su koeficijenti ortogonalne<br />
transformacije a ij = cos( x'i<br />
, x j ) prikazani u Tab. 1.<br />
x 1<br />
x 3<br />
e 3<br />
e 1<br />
x 1<br />
x 3<br />
e 3<br />
0<br />
e 1<br />
e 2<br />
e 2<br />
v<br />
x 2<br />
Sl. 2.5 Transformacija okomitih sustava<br />
x 2
Tablica 1. koeficijenti transformacije okomitih baza<br />
Jedinični vektor e '1<br />
u zaokrenutom sustavu možemo izraziti preko jediničnih vektora<br />
nezaokrenutog sustava i e kao e '1 = a11e1<br />
+ a12e2<br />
+ a13e3<br />
= aije<br />
j ili općenito e 'i = aije<br />
j .<br />
Komponente proizvoljnog vektora v u osnovnom sustavu izgledaju u obliku<br />
a u zarotiranom sustavu u obliku<br />
j<br />
j<br />
14<br />
v = v e<br />
(2.52)<br />
v = v' e<br />
(2.53)<br />
Prikažemo li i ' e kao linearnu kombinaciju vektora e j i uvrstimo u izraz (52) dobijemo<br />
usporedbom (2.52) s (2.54) vidimo da je<br />
i 'i<br />
v' v = e<br />
(2.54)<br />
j<br />
i ij a<br />
ij<br />
i<br />
j<br />
v = a v'<br />
(2.55)<br />
Prethodni izraz (2.55) pretstavlja zakon transformacije Cartesieva tenzora prvog reda,<br />
odnosno vektora u ortogonalnim bazama j e i i ' e . Inverzijom izraza (2.55) dobivamo<br />
Uvrštenjem (2.56) u (2.55), te zamjenom indeksa j=k dobivamo:<br />
v' = a v<br />
(2.56)<br />
i<br />
ji<br />
j<br />
v j = aijakivk<br />
; ( v j = vk<br />
)<br />
(2.57)<br />
iz čega slijedi da ij ki a a mora biti 1 ili 0 ovisno o indeksima j i k , dakle:<br />
⎧1....j<br />
= k<br />
ij aki<br />
= δ = ⎨<br />
(Kroneckerov simbol) (2.58)<br />
⎩0....j<br />
≠ k<br />
a jk<br />
x 1 x 2<br />
3 x<br />
x '1<br />
a 11 a 12 a 13<br />
x '2<br />
a 21 a 22 a 23<br />
x '3<br />
a 31 a 32 a<br />
33
što predstavlja uvjet ortogonalnosti, odnosno radi se o ortogonalnoj transformaciji u<br />
ortogonalnim vektorskim bazama prostora E 3 .<br />
U skladu s izrazom (2.56) dobivamo komponente dijadnog produkta dvaju vektora<br />
zarotiranom koordinatnom sustavu u obliku.<br />
gdje su: T ' ij = u'i<br />
v'<br />
j i pq p q<br />
i<br />
j<br />
ip<br />
p<br />
jq<br />
q<br />
ip<br />
jq<br />
p<br />
q<br />
'<br />
u i i<br />
15<br />
'<br />
v j u<br />
u ' v'<br />
= ( a u )( a v ) = a a u v<br />
(2.59)<br />
T = u v tenzori drugog reda pa (58) izgleda:<br />
T ' = a a T<br />
(2.60)<br />
ij<br />
Izraz (2.60) predstavlja transformaciju komponenata tenzora drugog reda unutar dvaju<br />
okomitih sustava. Analogno izrazu (2.60) imamo definiranu obratnu transformaciju u obliku.<br />
ij<br />
pi<br />
ip<br />
qj<br />
jq<br />
pq<br />
pq<br />
T = a a T '<br />
(2.61)<br />
Isto vrijedi za Cartesieve tenzore viših redova, npr. Za tenzor četvrtog. reda:<br />
2.5. Operacije s tenzorima i njihova svojstva<br />
T ' = a a a a T<br />
(2.62)<br />
ijkl<br />
Tenzori se mogu meñusobno zbrajati i množiti, a posjeduju i neka bitna svojstva kao što su<br />
simerija, antimetrija, svojstvene vrijednosti itd.<br />
2.5.1. Zbrajanje<br />
Zbrajati se mogu samo tenzori istog reda, a njihovim zbrajanjem dobije se novi tenzor istog<br />
reda kao i tenzori koji se zbrajaju, kao na primjer.<br />
2.5.2. Množenje<br />
ijpqr<br />
ip<br />
ijpqr<br />
jq<br />
kr<br />
ls<br />
ijpqr<br />
pqrs<br />
P + Q = R<br />
(2.63)<br />
Množiti se mogu tenzori različitih redova, a kao rezultat dobije se tenzor čiji je red jednak<br />
zbroju redova pomnoženih tenzora, kao na primjeru:<br />
a ib<br />
j = Tij<br />
; i jk ijk<br />
v F = A ; D ijTkm<br />
= Fijkm<br />
(2.64)
2.5.3. Simetrija i antimetrija tenzora<br />
Svaki asimetrični odnosno nesimetrični tenzor dade se rastaviti na simetrični i antimetrični<br />
dio. Tenzor je simetričan ako za njegove komponente vrijedi<br />
Tenzor je antimetričan ako za njegove komponente vrijedi<br />
ij<br />
ji<br />
16<br />
T T = (2.65)<br />
T = −T<br />
(2.66)<br />
ij<br />
Ako je tenzor asimetričan, tada se dade napraviti negov jedinstveni aditivni rastav u obliku:<br />
ji<br />
1 1<br />
T ij = ( Tij<br />
+ Tji)<br />
+ ( Tij<br />
− Tji)<br />
= Sij<br />
+ A<br />
2 2<br />
gdje je ij S simetrični dio, a Aij antimetrični dio tenzora.<br />
2.5.4. Vlastite vrijednosti tenzora<br />
ij<br />
(2.67)<br />
U mehanici kontinuuma vrlo su važna neka bitna svojstva tenzora. Posebno pažnja je<br />
usmijerena na tenzore drugog reda zbog tenzora deformacija i tenzora naprezanja. Jedno od<br />
najvažnijih svojstava tenzora je posjedovanje vlastitih vrijednosti.<br />
Polazimo od toga da svakom tenzoru drugog reda T ij pripada vektor u nekom smjeru koji se<br />
dobiva kao skalarni produkt tenzora i vektora normale u tom smjeru.<br />
v = T n<br />
(2.68)<br />
i<br />
Ako v i odgovara svojstvenom odnosno glavnom smjeru tada je vi pisati kao<br />
= λni<br />
, pa se (67) može<br />
λ n = T n<br />
(2.69)<br />
i<br />
gdje je i n jedinični vektor i pretstavlja glavni smjer tenzora T ij , a λ skalar, i predstavlja<br />
svojstvenu vrijednost tenzora T u tom smijeru<br />
ij<br />
ij<br />
ij<br />
j<br />
j<br />
T n λ n = 0<br />
(2.70)<br />
ij<br />
j − i<br />
budući da i n možemo napisati preko tenzora interpolacije δ ij u obliku ni = δijn<br />
j , tada je.<br />
( T λδ ) n = 0<br />
(2.71)<br />
ij − ij j<br />
Sustav (2.71) pretstavlja tri jednadžbe sa četiri nepoznanaice, i<br />
n i λ za svaki glavni smjer. U<br />
razvijenom obliku taj se sustav može napisati kao:
( T11 − λ ) n1<br />
+ T12n2<br />
+ T13n3<br />
= 0<br />
T n + T − λ ) n + T n = 0<br />
21<br />
1<br />
( 22 2 23 3<br />
T32n2<br />
+ ( T33<br />
− ) 3<br />
T n + λ n = 0<br />
(2.72)<br />
31<br />
1<br />
Netrivijalno riješenje sustava (2.72) može se dobiti jedino ako je determinanta sustava<br />
jednaka nuli, dakle.<br />
det . T λδ = 0<br />
(2.73)<br />
ij − ij<br />
Razvojem determinante (2.73) dolazimo do karakterističnog polinoma u obliku.<br />
17<br />
3 2<br />
λ − I λ + I λ − I = 0<br />
(2.74)<br />
1<br />
gdje su I 1, I2<br />
i I3 redom: prva, druga i treća invarijanta tenzora T ij , a mogu se izraziti u obliku:<br />
I 2 ( TiiT<br />
jj − TijTij<br />
1<br />
11<br />
2<br />
22<br />
3<br />
I = Tii<br />
= T + T + T<br />
(2.75)<br />
1<br />
2 2 2<br />
= ) = T11T22<br />
+ T22T33<br />
+ T33T11<br />
− T12<br />
− T23<br />
− T31<br />
(2.76)<br />
2<br />
3<br />
ij<br />
ij<br />
T<br />
T<br />
11<br />
21<br />
31<br />
T<br />
T<br />
12<br />
22<br />
32<br />
T<br />
T<br />
33<br />
13<br />
I = T = det. T = T T T<br />
(2.77)<br />
Kubna jednadžba (2.74) ili svojstveni polinom ima tri realna riješenja λ ≥ λ ≥ λ > 0 koja<br />
zovemo glavnim ili svojstvenim vrijednostima simetričnog tenzora T ij .<br />
Za simetrični tenzor s realnim komponentama postoji i realno riješenje za glavne vrijednosti<br />
λ neovisno o bazi prostora.<br />
λ 1 , λ 2 i 3<br />
Drugi pristup odreñivanju glavnih vrijednosti jest dijagonalizacija matrice komponenata<br />
tenzora T ij . Postoji ortogonalni linearni operator α koji matricu komponenata zadanog<br />
realnog tenzora prevodi u dijagonalnu matricu.<br />
T<br />
23<br />
33<br />
−1<br />
λ = α Tα<br />
(2.78)<br />
gdje je Tλ dijagonalna matrica u kojoj su na dijagonali glavne vrijednosti, a T simetrični<br />
tenzor s realnim komponentama.<br />
1<br />
T 0 λ 0<br />
(2.79)<br />
λ =<br />
λ<br />
0<br />
0<br />
2<br />
0<br />
0<br />
λ<br />
3<br />
1<br />
2<br />
3
Izvandijagonalni elementi matrice T λ jednaki su nuli. Matrica α ortogonalna je matrica<br />
transformacije koja početnu ortonormiranu bazu ( e 1 , e2<br />
, e3<br />
) prevodi u bazu svojstvenih<br />
vektora ( e' 1 , e'2<br />
, e'3<br />
) = ( n1<br />
, n2<br />
, n3)<br />
. Njeni koeficijenti transformacije su α ij dobiveni na temelju<br />
transformacije dviju ortogonalnih baza.<br />
i<br />
ij<br />
j<br />
18<br />
α e ' = e<br />
(2.80)<br />
Baza i ' e pokazuje smjerove glavnih vrijednosti. Kada odredimo glavne vrijednosti,<br />
rješavanjem sustava (2.78) odreñujemo smjerove vlastitih vrijednosti n i za svaku vlastitu<br />
vrijednost<br />
tenzora.<br />
λ i . Glavne vrijednosti simetričniog tenzora su ujedno i ekstremne vrijednosti<br />
2.5.5. Supstituirajući ili Kroneckerov tenzor<br />
Supstituirajući ili Kroneckerov tenzor definira se na slijedeći način.<br />
⎧1....i<br />
= j<br />
δij = ⎨<br />
(2.81)<br />
⎩0....i<br />
≠ j<br />
Ovaj tenzor ima iste komponente u svim koordinatnim sustavima, pa ga još zovemo i<br />
izotropan tenzor.<br />
Pomoću njega možemo izvršiti zamjenu indeksa. npr.<br />
2.5.6. Alternirajući tenzor<br />
Predstavlja tenzor trećeg reda, a definiran je na slijedeći način:<br />
e ijk<br />
e ijk<br />
= + 1 , ako je i , j i k ciklička permutacija brojeva 1,2, 3<br />
= −1,<br />
ako je i , j i k anticiklička permutacija brojeva 1,2, 3<br />
eijk = 0 , u svim ostalim slučajevima.<br />
δ ' = δ<br />
(2.82)<br />
ij<br />
ij<br />
j<br />
ij<br />
δ v = v<br />
(2.83)<br />
i<br />
e = e = e = + 1<br />
(2.84)<br />
123<br />
231<br />
312<br />
e = e = e = −1<br />
(2.85)<br />
321<br />
213<br />
132
2.5.7. Vektorski produkt u tenzorskom obliku<br />
Vektorski produkt u tenzorskom obliku se izražava pomoću alternirajućeg tenzora i izgleda.<br />
2.5.8. Tenzorska polja i derivacije tenzora<br />
a × b = c ; c i = eijka<br />
jbk<br />
(2.86)<br />
Realne, vektorske i tenzorske funkcije u trodimenzionalmom Euklidovu prostoru E 3 zovemo<br />
poljima. Tenzorsko polje označava prostor tenzora T ( x, t)<br />
u kojem se pridruženi par x i t<br />
mogu mijenjati u prostoru i vremenu. To polje je kontinuirano ako su komponente iz T ( x , t)<br />
kontinuirane funkcije od x i t. Tenzorsko polje je stacionarno ako tenzorske funkcije ne ovise<br />
o vremenu nego su samo funkcije koordinata. Razlikujemo polja:<br />
φ = φ(<br />
x,<br />
t)<br />
(skalarno polje)<br />
= v ( x,<br />
t)<br />
(vektorsko polje)<br />
vi i<br />
Tij Tij<br />
= ( x,<br />
t)<br />
(tenzorsko polje) (2.87)<br />
Ako se parcijalno derivira tenzor m-tog reda po koordinatama xi dobiva se tenzor m+1 reda. U<br />
indeksnom zapisivanju parcijalna derivacija se označava sa zarezom iza indeksa iza kojeg<br />
slijedi indeks koordinate po kojoj se derivira kao na primjer:<br />
∂v<br />
∂x<br />
i<br />
j<br />
= ∂<br />
j<br />
v<br />
i<br />
= v<br />
i,<br />
j<br />
∂ v<br />
∂x<br />
2<br />
i = vi,<br />
jk<br />
j∂xk<br />
2<br />
∂ T<br />
k<br />
ij<br />
∂x<br />
∂x<br />
m<br />
= T<br />
ij,<br />
km<br />
19<br />
(2.88)<br />
Isto tako važan je i tenzorski prikaz nekih diferencijalnih operatora koji se koriste u mehanici<br />
kontinuuma. To su:<br />
∂φ<br />
grad φ = ∇φ<br />
= ei<br />
= ∂iφ<br />
= φ,<br />
i (vektorsko polje)<br />
∂x<br />
Simbol<br />
∇ φ =<br />
2<br />
i<br />
div = ∇ ⋅ v = ∂iv<br />
i = vi,<br />
i<br />
v (skalarno polje)<br />
rot = ∇ × v = e ijk∂<br />
jvk<br />
= eijkvk<br />
, j<br />
v (vektorsko polje)<br />
div grad φ = ∇ ⋅ ∇φ<br />
= ∆φ<br />
= ∂ii<br />
φ = φ,<br />
ii (vektorsko polje) (2.89)<br />
∂ ∂ ∂ ∂<br />
∇ = = + + zove se „nabla“ ili „Hamiltonov diferencijalni<br />
∂ ∂x<br />
∂x<br />
∂x<br />
operator“, a simbol = ∇ ⋅∇<br />
operator“.<br />
x i<br />
1<br />
2<br />
∂<br />
3<br />
2 2 2<br />
∆ = 2<br />
∂x1<br />
+ + 2 2<br />
∂x2<br />
∂x3<br />
∂<br />
∂<br />
je „delta“ ili „Laplaceov diferencijalni
2.5.9. Integriranje tenzora, Stokesov i Gaussov teorem<br />
Integriranjem tenzora m-tog reda prema smjeru koordinata dobivamo novi tenzor reda m+1<br />
tako na pr. ∫ ij k dx T daje tenzor trećeg reda. Jedan od značajnijih poučaka u vektorskoj i<br />
tenzorskoj analizi koji uključuje integriranje tenzora je „Stokesov teorem“. Ovaj teorem daje<br />
vezu izmeñu linijskog i površinskog integrala, a izgleda<br />
∫<br />
C<br />
∫<br />
20<br />
T dx = n e T dS<br />
(2.90)<br />
ijk<br />
i<br />
S<br />
q qpi ijk, p<br />
gdje je ijk T tenzor proizvoljnog reda, S je zakrivljena ploha omeñena krivuljom C , dx i je<br />
element tangente na krivulju C, q n je vanjska normala na plohu S , a e qpi je alternirajući<br />
tenzor sa karakterističnim svojstvima (2.84) i (2.83).<br />
x 1<br />
x 3<br />
C<br />
S<br />
. .<br />
. .<br />
. .<br />
. . .<br />
.<br />
.<br />
.<br />
. .<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
.<br />
. . . .<br />
. . . .<br />
.<br />
.<br />
.<br />
dx i<br />
Sl. 2.6 Stokesov teorem<br />
Drugi vrlo značajni teorem koji se koristi u mehanici kontinuuma je „Gaussov teorem“ o<br />
divergenciji koji povezuje površinski i volumenski integral, a često se zove i „Green-Gauss-<br />
Ostrogradski teorem“ (Sl. 2.7).<br />
∫<br />
S<br />
∫<br />
nq<br />
x 2<br />
n T dS = T dV<br />
(2.91)<br />
gdje je V volumen omeñen plohom S , a n p vanjska normala na plohi S.<br />
x 1<br />
x 3<br />
p<br />
ijk<br />
V<br />
ijk, p<br />
S n p<br />
.<br />
.<br />
. .<br />
. . .<br />
.<br />
.<br />
. . .<br />
. .<br />
.<br />
.<br />
.<br />
. . .<br />
. . .<br />
. .<br />
.<br />
.<br />
. . . V.<br />
.<br />
Sl. 2.7 Gaussov teorem<br />
x 2
3. MODELI DEFORMIRANJA MATERIJALNOG KONTINUUMA<br />
Promatramo model deformiranja materijalnog kontinuuma. Tijelo označeno s t=t0 nalazi se u<br />
prirodnom nedeformiranom stanju. Nakon djelovanja stanovitog opterećenja tijelo se<br />
deformira i pomakne u položaj označen s t=t1 u deformirano stanje (Sl. 3.1)<br />
x 3<br />
e 3<br />
0<br />
t=t1<br />
t=to<br />
S .<br />
. . .<br />
.<br />
. .<br />
. .<br />
. .<br />
.<br />
M<br />
. . .<br />
. . . .<br />
.<br />
. M<br />
.<br />
.<br />
. .<br />
.<br />
. .<br />
.<br />
dV<br />
.<br />
. dV . u . . .<br />
. . . .<br />
.<br />
.<br />
. . . . .<br />
.<br />
.<br />
x . V . . .<br />
2<br />
.<br />
.<br />
V<br />
.<br />
. . .<br />
r .<br />
. .<br />
.<br />
.<br />
e 2<br />
e 1<br />
r<br />
x 1<br />
Sl. 3.1 Model deformiranja materijalnog kontinuuma<br />
Simboli bez crtice označavaju referentno, početno ili nedeformirano stanje, a simboli sa<br />
crticama deformirano ili trenutno stanje. Tijelo se sastoji od nebrojeno mnogo čestica koje<br />
imaju svoj volumen i masu. One su kontinuirano povezane sa susjednim točkama s kojima<br />
čine neprekidnu sredinu. Tijelo zauzima dio trodimenzionalnog prostora E 3 joji je omeñen<br />
zatvorenom plohom S i pripadaćućim volumenom V.<br />
3.1. Prirodna ili referentna konfiguracija ) t t =<br />
( 0<br />
Tijelo V zauzima svoj prirodni nedeformirani položaj. Točki M(x1 , x2<br />
, x3<br />
, t0<br />
) u tom položaju<br />
pridružen je radijus vektor izražen preko prirodnih koordinata kao<br />
r = x e + x e + x e = x e<br />
(3.1)<br />
1<br />
1<br />
Koordinate (x 1,<br />
x2<br />
, x3<br />
, t0)<br />
u nedeformiranoj konfiguraciji zovemo „materijalne koordinate“ ,<br />
„Lagrangeove koordinate“ ili prirodne koordinate.<br />
3.2. Deformirana ili trenutna konfiguracija t = t )<br />
2<br />
2<br />
3<br />
3<br />
( 1<br />
Pod opterećenjem se tijelo deformira i giba. Točke tijela mijenjaju svoj položaj u odnosu na<br />
početno stanje, pa dakle vrijedi:<br />
M → M ';<br />
dV → dV ';<br />
V → V ' ; S → S'<br />
(3.2)<br />
j<br />
j<br />
S<br />
21
U novom položaju točki M odgovara točka M ' s novin koordinatama (x'1 , x'2<br />
, x'3<br />
, t1<br />
) i novim<br />
radijus vektorom:<br />
r' = x' e + x' e + x' e = x' e<br />
(3.3)<br />
1<br />
1<br />
Koordinate (x'1 , x'2<br />
, x'3<br />
, t1<br />
) u novoj deformiranoj konfiguraciji zovemo „prostorne<br />
koordinate“' ili „Eulerove koordinate“.<br />
Na temelju dvaju radijus vektora točke M u nedeformiranom stanju i točke M ' u<br />
deformiranom stanju možemo definirati vektor pomaka točke M izmeñu dva stanja kao:<br />
2<br />
2<br />
3<br />
3<br />
u = r'−r<br />
(temeljna jednadžba deformiranja) (3.4)<br />
Skup pomaka svih točaka tijela čini polje pomaka. To je vektorsko polje u<br />
komponentama koje čine skalarna polja:<br />
i<br />
i<br />
22<br />
3<br />
E sa skalarnim<br />
u = , u , u )<br />
(3.5)<br />
(u1 2 3<br />
U indeksnoj notaciji u i , ( i = 1,2,3 ). Komponente pomaka su funkcije koordinata.<br />
3.3. Lagrangeov pristup deformiranju tijela<br />
Ako je proces deformiranja realnog čvrstog tijela iz početne konfiguracije u tekuću ili<br />
trenutnu izražen preko materjalnih koordinata (xi ) i prostornih koordinata (x'i ) u obliku:<br />
(O, 0<br />
ui i ( 1 2 3<br />
x'i x'i<br />
( x1,<br />
x2,<br />
x3<br />
x1<br />
, x2<br />
, x3<br />
, t ) - referentni koordinatni sustav<br />
= u x , x , x , t)<br />
- pomaci<br />
= , t)<br />
- koordinatne funkcije, (3.6)<br />
gdje su prostorne koordinate x' i funkcija materjalnih ili Lagrangeovih koordinata, zovemo<br />
„Lagrangeovom formulacijom deformiranja realnog čvrstog tijela“, ili „Lagrangeovim<br />
opisom deformiranja realnog čvrstog tijela“ a pomaci su prikazani u obliku<br />
3.4. Eulerov pristup deformiranju tijela<br />
u = x' −x<br />
(3.7)<br />
i<br />
Ako je proces deformacije čvrstog tijela opisan pomoću prostornih i materijalnih koordinata<br />
slijedećim vezama:<br />
( x 1 x 2 3<br />
ui ui(x'1<br />
, x'2<br />
, x'3<br />
xi xi<br />
( x'1<br />
, x'2<br />
, x'3<br />
i<br />
i<br />
O , ' , ' , x'<br />
) - trenutni koordinatni sustav<br />
= , t)<br />
- pomaci<br />
= , t)<br />
- koordinatne funkcije, (3.8)
gdje su materjalne koordinate x i funkcije od prostornih ili Eulerovih koordinata, tada takvu<br />
formulaciju zovemo „Eulerovom formulacijom deformiranja realnog čvrstog tijela“, ili<br />
„Eulerovim opisom deformiranja realnog čvrstog tijela“. Vezano za temeljnu jednadžbu<br />
deformiranja tijela imamo.<br />
Opisana preslikavanja u prostoru<br />
različita od nule.<br />
J<br />
i<br />
i<br />
i<br />
23<br />
x' = x + u<br />
(3.9)<br />
3<br />
E meñusobno su inverzna ako je Jacobieva determinanta<br />
∂ x' i = ≠ 0 dV'<br />
; ( J = )<br />
(3.10)<br />
∂ x<br />
dV<br />
Opisano preslikavanje čuva masu tijela tako da vrijedi<br />
j<br />
'<br />
∫ ρ(xi<br />
, t0<br />
)dV = ∫ ρ' (x'i<br />
, t)dV ) = ∫ ρ' (xi<br />
, t) JdV<br />
(3.11)<br />
V '<br />
V V<br />
gdje je ρ gustoća tijela u početnom nedeformiranom stanju, a ρ ' gustoća tijela u trenutnom<br />
deformiranom stanju. Kako gornja relacija vrijedi za svaki proizvoljni volumen onda vrijedi<br />
ρ = ρ' J<br />
(3.12)<br />
Prikazano preslikavanje povezuje elementarne volumene u oba stanja kao:<br />
dV' = J dV<br />
(3.13)<br />
Ovdje fizikalni smisao Jacobiane slijedi iz zakona očuvanja mase za vrijeme preslikavanja.<br />
ρdV = ρ' dV' = ρ' JdV ;<br />
dm =<br />
ρ<br />
J = ;<br />
ρ'<br />
dm'<br />
ρ<br />
ρ<br />
ρ ' = ; dV' = dV (3.14)<br />
J<br />
ρ'<br />
iz čega slijedi da se pri deformaciji tijela mijenja gustoća materije i volumen u prikazanom<br />
odnosu.