1 Temat 4: Stereogram normalny poziomych zdjÄÄ naziemnych ...
1 Temat 4: Stereogram normalny poziomych zdjÄÄ naziemnych ...
1 Temat 4: Stereogram normalny poziomych zdjÄÄ naziemnych ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
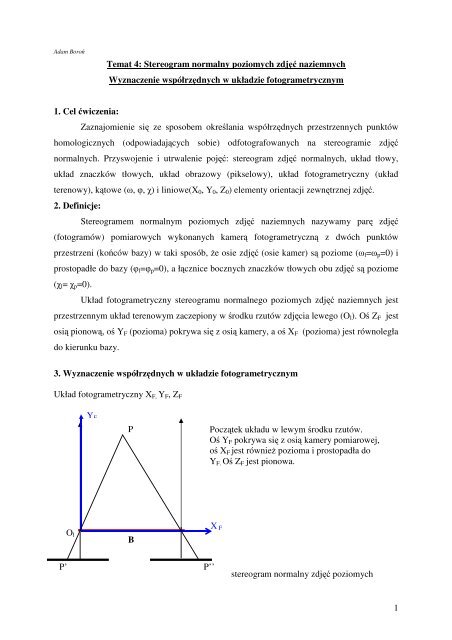
Adam Boroń<strong>Temat</strong> 4: <strong>Stereogram</strong> <strong>normalny</strong> <strong>poziomych</strong> zdjęć <strong>naziemnych</strong>Wyznaczenie współrzędnych w układzie fotogrametrycznym1. Cel ćwiczenia:Zaznajomienie się ze sposobem określania współrzędnych przestrzennych punktówhomologicznych (odpowiadających sobie) odfotografowanych na stereogramie zdjęć<strong>normalny</strong>ch. Przyswojenie i utrwalenie pojęć: stereogram zdjęć <strong>normalny</strong>ch, układ tłowy,układ znaczków tłowych, układ obrazowy (pikselowy), układ fotogrametryczny (układterenowy), kątowe (ω, φ, χ) i liniowe(X 0 , Y 0 , Z 0 ) elementy orientacji zewnętrznej zdjęć.2. Definicje:<strong>Stereogram</strong>em <strong>normalny</strong>m <strong>poziomych</strong> zdjęć <strong>naziemnych</strong> nazywamy parę zdjęć(fotogramów) pomiarowych wykonanych kamerą fotogrametryczną z dwóch punktówprzestrzeni (końców bazy) w taki sposób, że osie zdjęć (osie kamer) są poziome (ω l =ω p =0) iprostopadłe do bazy (φ l =φ p =0), a łącznice bocznych znaczków tłowych obu zdjęć są poziome(χ l = χ p =0).Układ fotogrametryczny stereogramu normalnego <strong>poziomych</strong> zdjęć <strong>naziemnych</strong> jestprzestrzennym układ terenowym zaczepiony w środku rzutów zdjęcia lewego (O l ). Oś Z F jestosią pionową, oś Y F (pozioma) pokrywa się z osią kamery, a oś X F (pozioma) jest równoległado kierunku bazy.3. Wyznaczenie współrzędnych w układzie fotogrametrycznymUkład fotogrametryczny X F, Y F , Z FY FPPoczątek układu w lewym środku rzutów.Oś Y F pokrywa się z osią kamery pomiarowej,oś X F jest również pozioma i prostopadła doY F. Oś Z F jest pionowa.O lBX FP’ P’’stereogram <strong>normalny</strong> zdjęć <strong>poziomych</strong>1
Wzory wyrażające zależność pomiędzy współrzędnymi terenowymi punktu w układziefotogrametrycznym a jego współrzędnymi tłowymi na obu zdjęciach - dla poziomegostereogramu normalnego:YXFc kFgdzie:C K – stała kameryB – długośc bazy fotografowania,x’, z’ – współrzędne tłowe zdjęcia lewego; x’’, z’’ – współrzędne tłowe zdjęcia lewegop = x’ – x’’B= ⋅pB YF= ⋅ x' = ⋅ x'p cZFkparalaksa podłużna.B YF= ⋅ z' = ⋅ z'p ck4. Wykonanie tematuW ramach realizacji tematu należy:a) pomierzyć na obu zdjęciach stereogramu cztery homologiczne punkty stanowiącenaroża prostokątnego otworu okiennego, dla dwu okien,b) określić przestrzenne współrzędne tych punktów w układzie fotogrametrycznym,c) wykonać analizę geometrii pomierzonych punktów w aspekcie: założeń budowlanych,usytuowania w stosunku do bazy fotogrametrycznej i optymalizacji skali wydruku.Ad.a) <strong>Stereogram</strong> i okna do pomiaru wyznacza prowadzący zajęcia. Szczegółowepołożenie okien do pomiaru pokazane są na szkicach ster(n).jpg Pomiar wykonywanyjest z wykorzystaniem autografu cyfrowego VSD w opcji „stereo”, wykorzystującrejestrację za pomocą klawisza „j” oraz „przeskakiwanie” z ruchem kursora zapomocą klawisza Tab. Pomiarowi poddawane są te same punktu okien na obuzdjęciach stereogramu. Jako punkty do pomiaru wybieramy łatwe do identyfikacjipunkty okna, które powinny w naturze tworzyć prostokąt leżący w płaszczyźniepionowej. Dla wyznaczenia współrzędnych tłowych mierzonych punktów okna należypomierzyć również na każdym zdjęciu wszystkie znaczki tłowe (od 1 do 4).Numeracja naroży okien nie może się powtarzać z numeracją znaczków. Wskazanejest numerować punkty okna przyjmując: jako pierwszą cyfrę numer stereogramu,drugą (i ewentualnie trzecią) – numer okna, trzecią (lub czwartą) – numer narożnikaokna (1 – lewy górny, 2- prawy górny, 3- prawy dolny, 4 – lewy dolny).2
Dzięki zeskanowaniu zdjęć równolegle do łącznic znaczków tłowych stereogram możebyć obserwowany stereoskopowo. Przestrzenny ruch znaczka pomiarowego w tejopcji pomiaru na VSD można zauważyć przy zmianie jego położenia na prawymzdjęciu ruchem kursora prawo-lewo. Zmienia się wtedy paralaksa podłużna położeniaznaczka, co obserwujemy jako ruch znaczka przód–tył. Współrzędne pikselowewszystkich pomierzonych punktów należy notować w specjalnym dzienniku.Wypełniony dziennik pomiarowy stanowi dokument, który należy dołączyć dosprawozdania z wykonania tematu.Ad b) Współrzędne przestrzenne naroży okien w układzie fotogrametrycznymwyznacza się w oparciu o podane wcześniej wzory. Występujące we wzorachwspółrzędne punktów w układzie tłowym należy wcześniej obliczyć na podstawiepomierzonych współrzędnych znaczków tłowych. Można wyrazić współrzędne tłowenaroży okna w pikselach (wówczas należy również wyrazić w pikselach stałą kameryc k ) lub wyrazić współrzędne tłowe w milimetrach (stała kamery bez zmiany). Stałąkamery c k∞ i poprawkę ∆ c k odczytujemy z ramki tłowej zdjęcia. Ostatecznewspółrzędne naroży okna wyrazić w metrach z dokładnością do 1mm.Obliczenie współrzędnych tłowych pomierzonych punktówGGP’(x’,z’)P’’(x’’,z’’)L0’PL0”PDukład tłowyzdjęcialewegoDukład tłowyzdjęciaprawegoWspółrzędne punktu przecięcia łącznic znaczków tłowych - w tym przypadkurównież współrzędne punktu głównego (d x0 = d z0 = 0).x0=x G+ x D2z0z L + z= P23
Współrzędne tłowe i c k wyrażone w pikselach:zdjęcie lewe:zdjęcie prawe:x p ’ = x – x 0 x p ” = x – x 0z p ’ = z – z 0 z p ” = z – z 0(c k ) p = (c k ) mm / (p s ) mmWspółrzędne tłowe i c k wyrażone w milimetrach:zdjęcie lewe:zdjęcie prawe:x’ = x p ’ p s x” = x p ” p sz’ = z p ’ p s z” = z p ” p sAd c) Na podstawie obliczonych wcześniej współrzędnych naroży okna należy terazsprawdzić, czy pomiar i obliczenia zostały wykonane poprawnie. Zrealizować należyto poprzez sprawdzenie, na ile kształt pomierzonego okna jest zgodny z prostokątem.W tym celu należy określić długości wszystkich odcinków okna wraz z przekątnymi izestawić różnice odpowiadających sobie odcinków. Długości należy określić zewspółrzędnych X F , i Z F . Dopuszczalne różnice związane są z dokładnością budowlanąi nie powinny być większe od 20-30mm. Jeżeli stwierdzone różnice będą większewskazywać to może na niepoprawny pomiar lub obliczenie współrzędnych. Drugąkontrolą poprawności obliczeń jest sprawdzenie pionowości bocznych krawędzi okna.Należy określić wielkości ∆Y g-d dla obu pionowych krawędzi okna. W przypadkukrawędzi pionowych wartość ∆Y g-d powinna równać się zero. Podobnie jakpoprzednio dopuszczalna różnica nie powinna przekraczać ±30mm. Poza kontrolamimożna również na podstawie obliczonych współrzędnych stwierdzić czy bazafotogrametryczna (oś X układu fotogrametrycznego) była równoległa do elewacjibudynku. Wykonujemy to poprzez analizę wartości ∆Y l-p dla odcinków <strong>poziomych</strong>okna. Jeżeli te wartości będą równe zero, (lub zbliżone do zera) to możemy przyjąć, żebaza była równoległa do elewacji. Jeżeli wielkości te będą takie same (podobne) aleróżne od zera to znaczy, że baza nie była równoległa do elewacji. Jeśli wartości będąznacznie się różnić świadczy to o błędach w pomiarach lub obliczeniach. Napodstawie obliczonych wymiarów okna należy określić jaki jest minimalnymianownik skali (liczba całkowita), w której można skartować to okno na arkuszuformatu A4 210 X 297 mm (bez marginesów)Dane: klon\vsd\zaoczni\stereogram <strong>normalny</strong>a) Pięć stereogramów zdjęć <strong>normalny</strong>ch obiektu architektonicznego wykonanych kamerąUMK 10/1318iL_n- oznaczenie lewego zdjęcia i-ego stereogramu,4
iP_n- oznaczenie prawego zdjęcia i-ego stereogramu,b) Długości baz fotografowania:B 1 = 1.468 m - dla stereogramu stereogram 1B 2 = 1.344 m - dla stereogramu stereogram 2B 3 = 2.772 m - dla stereogramu stereogram 4B 4 = 1.146 m - dla stereogramu stereogram 5B 5 = 1.594 m - dla stereogramu stereogram 6c) Stała kamery: c k = c k∞ + ∆ c k (c k∞ i ∆ c k odczytujemy ze zdjęć)d) Wielkość piksela skanowania p s = 0.014 mmxzDziennik pomiaru stereogramu zdjęć <strong>normalny</strong>ch2L1 3 Obserwator1341=2x21= z1+ z32( x + ) ..............0 4=( ) ..................0=….piksele. pikseleZdjęcie lewe:Data.............................................................Nr <strong>Stereogram</strong>u.......................................Stała kamery C k =.....................................[mm]Długość bazy B=.................................. [m]Piksel skanowania p s =[mm]exz1=2x21= z1+ z32( x + ) ..............0 4=( ) ............0=Zdjęcie prawe:24Ppiksele…pikselNr1(L)2(G)3(P)4(D)Układ obrazu cyfrowego Układ tłowy zdjęcia Układ obrazu cyfrowego Układ tłowy zdjęciaNrx z x p ’= x-x 0 z p ’= z-z 0x z x ’’ p = x-x 0z ’’ p = z-z 0[px][px][px]][px][px][px][px]][px]]1(L)2(G)3(P)4(D)5