Základy mechaniky a kinematiky el. pohonů (prezentace v pdf)
Základy mechaniky a kinematiky el. pohonů (prezentace v pdf)
Základy mechaniky a kinematiky el. pohonů (prezentace v pdf)

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
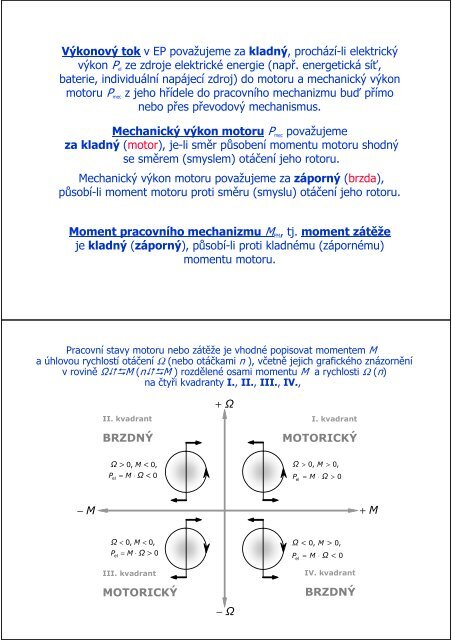
Výkonový tok v EP považujeme za kladný, prochází-li <strong>el</strong>ektrickývýkon P <strong>el</strong> ze zdroje <strong>el</strong>ektrické energie (např. energetická síť,baterie, individuální napájecí zdroj) do motoru a mechanický výkonmotoru P mec z jeho hříd<strong>el</strong>e do pracovního mechanizmu buď přímonebo přes převodový mechanismus.Mechanický výkon motoru P mec považujemeza kladný (motor), je-li směr působení momentu motoru shodnýse směrem (smyslem) otáčení jeho rotoru.Mechanický výkon motoru považujeme za záporný (brzda),působí-li moment motoru proti směru (smyslu) otáčení jeho rotoru.Moment pracovního mechanizmu M PM , tj. moment zátěžeje kladný (záporný), působí-li proti kladnému (zápornému)momentu motoru.Pracovní stavy motoru nebo zátěže je vhodné popisovat momentem Ma úhlovou rychlostí otáčení Ω (nebo otáčkami n ), včetně jejich grafického znázorněnív rovině ΩM (nM ) rozdělené osami momentu M a rychlosti Ω (n)na čtyři kvadranty I., II., III., IV.,II. kvadrantBRZDNÝ+ΩI. kvadrantMOTORICKÝ>Ω 0, MP = M ⋅ Ω 0,PΩ= M ⋅ ><strong>el</strong>0− M+MΩ < 0, M < 0,P = M ⋅ Ω 0<strong>el</strong>>III. kvadrantMOTORICKÝ−ΩΩ < 0, M > 0,P= M ⋅ Ω