

Neuromorphic Computing From Materials to Systems Architecture
Neuromorphic-Computing-Report_FNLBLP
Neuromorphic-Computing-Report_FNLBLP

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
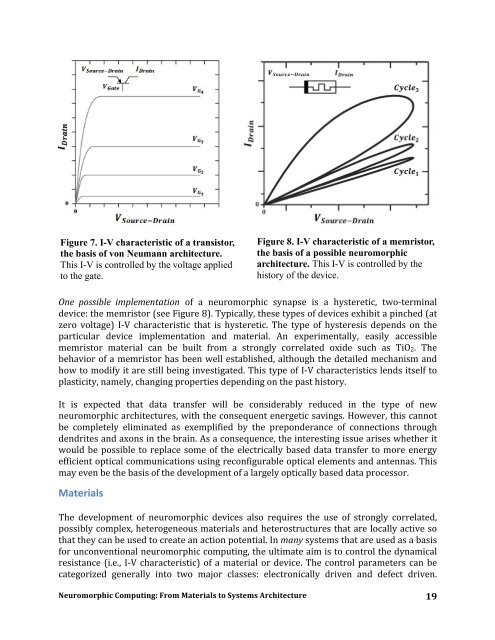
Figure 7. I-V characteristic of a transis<strong>to</strong>r,<br />
the basis of von Neumann architecture.<br />
This I-V is controlled by the voltage applied<br />
<strong>to</strong> the gate.<br />
Figure 8. I-V characteristic of a memris<strong>to</strong>r,<br />
the basis of a possible neuromorphic<br />
architecture. This I-V is controlled by the<br />
his<strong>to</strong>ry of the device.<br />
One possible implementation of a neuromorphic synapse is a hysteretic, two-‐‐terminal <br />
device: the memris<strong>to</strong>r (see Figure 8). Typically, these types of devices exhibit a pinched (at <br />
zero voltage) I-‐‐V characteristic that is hysteretic. The type of hysteresis depends on the <br />
particular device implementation and material. An experimentally, easily accessible <br />
memris<strong>to</strong>r material can be built from a strongly correlated oxide such as TiO2. The <br />
behavior of a memris<strong>to</strong>r has been well established, although the detailed mechanism and <br />
how <strong>to</strong> modify it are still being investigated. This type of I-‐‐V characteristics lends itself <strong>to</strong> <br />
plasticity, namely, changing properties depending on the past his<strong>to</strong>ry. <br />
It is expected that data transfer will be considerably reduced in the type of new <br />
neuromorphic architectures, with the consequent energetic savings. However, this cannot <br />
be completely eliminated as exemplified by the preponderance of connections through <br />
dendrites and axons in the brain. As a consequence, the interesting issue arises whether it <br />
would be possible <strong>to</strong> replace some of the electrically based data transfer <strong>to</strong> more energy <br />
efficient optical communications using reconfigurable optical elements and antennas. This <br />
may even be the basis of the development of a largely optically based data processor. <br />
<strong>Materials</strong><br />
The development of neuromorphic devices also requires the use of strongly correlated, <br />
possibly complex, heterogeneous materials and heterostructures that are locally active so <br />
that they can be used <strong>to</strong> create an action potential. In many systems that are used as a basis <br />
for unconventional neuromorphic computing, the ultimate aim is <strong>to</strong> control the dynamical <br />
resistance (i.e., I-‐‐V characteristic) of a material or device. The control parameters can be <br />
categorized generally in<strong>to</strong> two major classes: electronically driven and defect driven. <br />
<strong>Neuromorphic</strong> <strong>Computing</strong>: <strong>From</strong> <strong>Materials</strong> <strong>to</strong> <strong>Systems</strong> <strong>Architecture</strong> <br />
19