


Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
A<br />
B<br />
C<br />
D<br />
E<br />
F<br />
G<br />
H<br />
I<br />
J<br />
5<br />
Revision<br />
Revision<br />
Date<br />
Datum<br />
Name<br />
Name<br />
09412_515IIIT_Bergenbier_2120331<br />
1 2 3 4 5 6 7 8 9 10<br />
Function text<br />
Funktionstext<br />
Creation<br />
Lensch<br />
Erstellung<br />
Printing date<br />
Druckdatum<br />
22.06.2012<br />
14.08.2012<br />
W51.b Cat.5e 4x2x0,14 mm²<br />
W51.a ZKS 18x1 mm²<br />
Cable name<br />
Kabelname<br />
Cable type<br />
Kabeltyp<br />
<strong>Co</strong>nnection<br />
point<br />
Anschluss<br />
Customer<br />
Kunde<br />
Target designation<br />
external<br />
Zielbezeichnung<br />
extern<br />
Bergenbier<br />
Ploiesti (RO)<br />
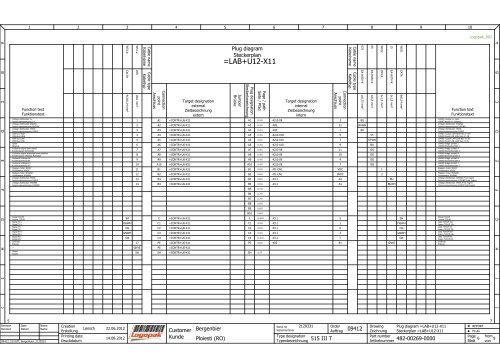
Plug diagram<br />
Steckerplan<br />
=LAB+U12-X11<br />
Jumper<br />
Brücke<br />
Plug designation<br />
Steckerbezeichnung<br />
Page / path<br />
Seite / Pfad<br />
Target designation<br />
internal<br />
Zielbezeichnung<br />
intern<br />
Voltage distribution V+<br />
Spannungsversorgung V+ 1 A1 =CONTR+U6-X11 A1 /1.2:G -K2.0-X8<br />
3<br />
BU<br />
Voltage distribution GND/0V<br />
Spannungsversorgung GND/0V 2 A2 =CONTR+U6-X11 A2 /1.2:G -X02<br />
21<br />
BUWH<br />
Voltage distribution 24VDC<br />
Spannungsversorgung 24VDC 3 A3 =CONTR+U6-X11 A3 /1.2:G -X02<br />
1<br />
BU<br />
CAN bus HIGH<br />
CAN-Bus HIGH 4 A4 =CONTR+U6-X11 A4 /1.3:G -K2.0-X10<br />
5<br />
VT<br />
CAN bus LOW<br />
CAN-Bus LOW 5 A5 =CONTR+U6-X11 A5 /1.3:G -K2.0-X10<br />
7<br />
VTWH<br />
Spare<br />
Reserve 6 A6 =CONTR+U6-X11 A6 /1.3:G -K2.0-X10<br />
9<br />
BU<br />
Customer signal door switch<br />
Kundensignal Türkontakt 7 A7 =CONTR+U6-X11 A7 /1.4:G -K2.0-X8<br />
11<br />
OG<br />
Customer signal telescope home position<br />
Kundensignal Teleskop Ruhelage 8 A8 =CONTR+U6-X11 A8 /1.4:G -K2.0-X9<br />
10<br />
OG<br />
Customer voltage 0V<br />
Kundenspannung 0V 9 A9 =CONTR+U6-X11 A9 /1.4:G -K2.0-X9<br />
4<br />
OG<br />
Customer voltage V+<br />
Kundenspannung V+ 10 A10 =CONTR+U6-X11 A10 /1.4:G -K2.0-X9<br />
7<br />
OG<br />
Stepper motor 36VDC<br />
Schrittmotor 36VDC 11 B1 =CONTR+U6-X11 B1 /1.5:G -M1-CN1<br />
VDC<br />
1<br />
Stepper motor 36VGND<br />
Schrittmotor 36VGND 12 B2 =CONTR+U6-X11 B2 /1.6:G -M1-CN1<br />
0VDC<br />
2<br />
Voltage distribution 24VDC<br />
Spannungsversorgung 24VDC 13 B3 =CONTR+U6-X11 B3 /1.6:G -X3.1<br />
A3<br />
BU<br />
Voltage distribution 24VGND<br />
Spannungsversorgung 24VGND 14 B4 =CONTR+U6-X11 B4 /1.6:G -X3.1<br />
A1<br />
BUWH<br />
Shield TCP/IP<br />
Schirm TCP/IP SH C =CONTR+U6-X11 C /1.10:G -X3.1<br />
5<br />
SH<br />
Signal TX+<br />
Signal TX+ OGWH C1 =CONTR+U6-X11 C1 /1.9:G -X3.1<br />
1<br />
OGWH<br />
Signal TX-<br />
Signal TX- OG C2 =CONTR+U6-X11 C2 /1.9:G -X3.1<br />
6<br />
OG<br />
Signal RX+<br />
Signal RX+ GNWH C3 =CONTR+U6-X11 C3 /1.9:G -X3.1<br />
2<br />
GNWH<br />
Signal RX-<br />
Signal RX- GN C4 =CONTR+U6-X11 C4 /1.10:G -X3.1<br />
7<br />
GN<br />
Earthing<br />
Erdung 17 PE =CONTR+U6-X11 PE /1.5:G -X02<br />
81<br />
GNYE<br />
= GNYE<br />
PE =CONTR+U6-X11<br />
Shield<br />
Schirm<br />
SH<br />
B5<br />
B6<br />
B7<br />
B8<br />
B9<br />
B10<br />
/1.7:G<br />
/1.7:G<br />
/1.7:G<br />
/1.8:G<br />
/1.8:G<br />
/1.8:G<br />
SH =CONTR+U6-X11<br />
SH /1.1:F<br />
Serial no<br />
Seriennummer<br />
2120331<br />
Type designation<br />
Typenbezeichnung<br />
515 III T<br />
<strong>Co</strong>nnection<br />
point<br />
Anschluss<br />
Order<br />
Auftrag<br />
Cable name<br />
Kabelname<br />
Cable type<br />
Kabeltyp<br />
09412<br />
075 EA-H05V-K 1x0,75 mm²<br />
05 EA-H05V-K 1x0,5 mm²<br />
W102 ZKSUL<br />
2x1,5 mm²<br />
Drawing<br />
Zeichnung<br />
15 EA-H07V-K 1x1,5 mm²<br />
Part number<br />
Artikelnummer<br />
W101 CAT6<br />
8x0,14 mm²<br />
Plug diagram =LAB+U12-X11<br />
Steckerplan =LAB+U12-X11<br />
482-00269-0000<br />
Function text<br />
Funktionstext<br />
CANIO module V+ input<br />
CANIO Modul V+ Eingang<br />
Voltage distribution 24VGND<br />
Spannungsversorgung 24VGND<br />
Voltage distribution 24VDC<br />
Spannungsversorgung 24VDC<br />
CANIO module CAN-HIGH Bus #1 IN<br />
CANIO Modul CAN-HIGH Bus #1 IN<br />
CANIO module CAN-LOW Bus #1 IN<br />
CANIO Modul CAN-LOW Bus #1 IN<br />
CANIO Bridge contact 1<br />
CANIO Brückenkontakt 1<br />
CANIO Bridge contact 4<br />
CANIO Brückenkontakt 4<br />
CANIO Bridge contact 8<br />
CANIO Brückenkontakt 8<br />
CANIO Bridge contact 6<br />
CANIO Brückenkontakt 6<br />
CANIO Bridge contact 7<br />
CANIO Brückenkontakt 7<br />
Stepper motor 36VDC<br />
Schrittmotor 36VDC<br />
Stepper motor 36VGND<br />
Schrittmotor 36VGND<br />
Voltage distribution 24VGND Print engine<br />
Spannungsversorgung 24VGND Print Engine<br />
Voltage distribution 24VDC Print engine<br />
Spannungsversorgung 24VDC Print Engine<br />
Shield TCP/IP<br />
Schirm TCP/IP<br />
Data TCP/IP TX+<br />
Daten TCP/IP TX+<br />
Data TCP/IP TX-<br />
Daten TCP/IP TX-<br />
Data TCP/IP RX+<br />
Daten TCP/IP RX+<br />
Data TCP/IP RX-<br />
Daten TCP/IP RX-<br />
Earthing<br />
Erdung<br />
=<br />
<strong>Logopak</strong>_002<br />
REPORT<br />
+ PLUG<br />
Page<br />
6<br />
Blatt<br />
7<br />
from<br />
von<br />
A<br />
B<br />
C<br />
D<br />
E<br />
F<br />
G<br />
H<br />
I<br />
J<br />
9