

Handbuch
Handbuch
Handbuch

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
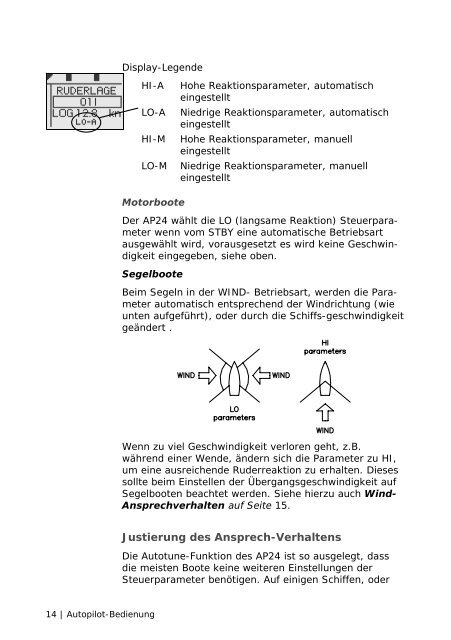
Display-Legende<br />
HI-A<br />
LO-A<br />
HI-M<br />
LO-M<br />
Hohe Reaktionsparameter, automatisch<br />
eingestellt<br />
Niedrige Reaktionsparameter, automatisch<br />
eingestellt<br />
Hohe Reaktionsparameter, manuell<br />
eingestellt<br />
Niedrige Reaktionsparameter, manuell<br />
eingestellt<br />
Motorboote<br />
Der AP24 wählt die LO (langsame Reaktion) Steuerparameter<br />
wenn vom STBY eine automatische Betriebsart<br />
ausgewählt wird, vorausgesetzt es wird keine Geschwindigkeit<br />
eingegeben, siehe oben.<br />
Segelboote<br />
Beim Segeln in der WIND- Betriebsart, werden die Parameter<br />
automatisch entsprechend der Windrichtung (wie<br />
unten aufgeführt), oder durch die Schiffs-geschwindigkeit<br />
geändert .<br />
Wenn zu viel Geschwindigkeit verloren geht, z.B.<br />
während einer Wende, ändern sich die Parameter zu HI,<br />
um eine ausreichende Ruderreaktion zu erhalten. Dieses<br />
sollte beim Einstellen der Übergangsgeschwindigkeit auf<br />
Segelbooten beachtet werden. Siehe hierzu auch Wind-<br />
Ansprechverhalten auf Seite 15.<br />
Justierung des Ansprech-Verhaltens<br />
Die Autotune-Funktion des AP24 ist so ausgelegt, dass<br />
die meisten Boote keine weiteren Einstellungen der<br />
Steuerparameter benötigen. Auf einigen Schiffen, oder<br />
14 | Autopilot-Bedienung