Übung 3 - ACIN
Übung 3 - ACIN
Übung 3 - ACIN

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
3 Lösung von Optimalsteuerungsproblemen mit direkten Verfahren Seite 6<br />
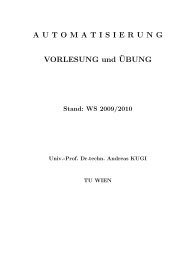
u (t)<br />
u i−1 u i u i+1 u i+2<br />
t i−1 t i t i+1 t i+2<br />
t<br />
Abbildung 3.1: Veranschaulichung der Parametrierung der Stellgröße u (t).<br />
Vektor der Optimierungsvariablen<br />
⎡<br />
x 0 ⎤<br />
u 0<br />
x 1<br />
y =<br />
u 1<br />
.<br />
⎢<br />
⎣x N−1 ⎥<br />
⎦<br />
u N−1<br />
(3.4)<br />
zusammengefasst. Damit kann das Optimalsteuerungsproblem (3.1) in ein statisches Optimierungsproblem<br />
überführt werden. Der Wert des Kostenfunktionals (3.1a) wird mit<br />
der Trapezregel in der Form<br />
(<br />
J d (y) = ϕ t N−1 , x N−1) N−2 ∑ 1 (<br />
+ t i+1 − t i) [ (<br />
l t i , x i , u i) (<br />
+ l t i+1 , x i+1 , u i+1)] (3.5)<br />
2<br />
i=0<br />
angenähert. Für die Ungleichungsbeschränkungen (3.1d) wird vereinfachend gefordert,<br />
dass sie lediglich an den Gitterpunkten erfüllt sind. Damit folgt<br />
(<br />
h t i , x i , u i) ≤ 0, i = 0, 1, . . . , N − 1 (3.6)<br />
und für die Endbedingungen (3.1c) erhält man<br />
(<br />
ψ t N−1 , x N−1) = 0. (3.7)<br />
Eine Diskretisierung des Differenzialgleichungssystems (3.1b) mit der impliziten Trapezregel<br />
liefert die algebraischen Gleichungsbedingungen<br />
x i+1 − x i − ti+1 − t i<br />
2<br />
[ (<br />
f t i , x i , u i) (<br />
+ f t i+1 , x i+1 , u i+1)] = 0, i = 0, 1, . . . , N − 2<br />
(3.8a)<br />
Vorlesung und <strong>Übung</strong> Optimierung (WS 2013/2014)<br />
© A. Kugi, Institut für Automatisierungs- und Regelungstechnik, TU Wien