Single-sensor hand and footprint-based multimodal biometric ...
Single-sensor hand and footprint-based multimodal biometric ...
Single-sensor hand and footprint-based multimodal biometric ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
elative frequency (%)<br />
30<br />
25<br />
20<br />
15<br />
10<br />
5<br />
0<br />
39 40 41 42 43 44 45 46 47 48 49<br />
shoe size<br />
3.1 Sensor properties<br />
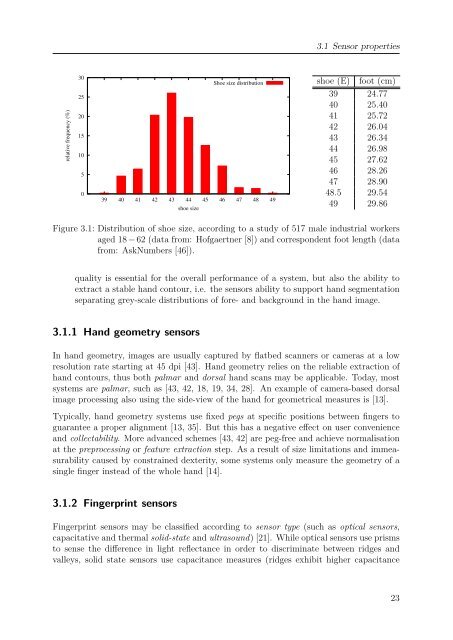
Shoe size distribution shoe (E) foot (cm)<br />
39 24.77<br />
40 25.40<br />
41 25.72<br />
42 26.04<br />
43 26.34<br />
44 26.98<br />
45 27.62<br />
46 28.26<br />
47 28.90<br />
48.5 29.54<br />
49 29.86<br />
Figure 3.1: Distribution of shoe size, according to a study of 517 male industrial workers<br />
aged 18 − 62 (data from: Hofgaertner [8]) <strong>and</strong> correspondent foot length (data<br />
from: AskNumbers [46]).<br />
quality is essential for the overall performance of a system, but also the ability to<br />
extract a stable <strong>h<strong>and</strong></strong> contour, i.e. the <strong>sensor</strong>s ability to support <strong>h<strong>and</strong></strong> segmentation<br />
separating grey-scale distributions of fore- <strong>and</strong> background in the <strong>h<strong>and</strong></strong> image.<br />
3.1.1 H<strong>and</strong> geometry <strong>sensor</strong>s<br />
In <strong>h<strong>and</strong></strong> geometry, images are usually captured by flatbed scanners or cameras at a low<br />
resolution rate starting at 45 dpi [43]. H<strong>and</strong> geometry relies on the reliable extraction of<br />
<strong>h<strong>and</strong></strong> contours, thus both palmar <strong>and</strong> dorsal <strong>h<strong>and</strong></strong> scans may be applicable. Today, most<br />
systems are palmar, such as [43, 42, 18, 19, 34, 28]. An example of camera-<strong>based</strong> dorsal<br />
image processing also using the side-view of the <strong>h<strong>and</strong></strong> for geometrical measures is [13].<br />
Typically, <strong>h<strong>and</strong></strong> geometry systems use fixed pegs at specific positions between fingers to<br />
guarantee a proper alignment [13, 35]. But this has a negative effect on user convenience<br />
<strong>and</strong> collectability. More advanced schemes [43, 42] are peg-free <strong>and</strong> achieve normalisation<br />
at the preprocessing or feature extraction step. As a result of size limitations <strong>and</strong> immeasurability<br />
caused by constrained dexterity, some systems only measure the geometry of a<br />
single finger instead of the whole <strong>h<strong>and</strong></strong> [14].<br />
3.1.2 Fingerprint <strong>sensor</strong>s<br />
Fingerprint <strong>sensor</strong>s may be classified according to <strong>sensor</strong> type (such as optical <strong>sensor</strong>s,<br />
capacitative <strong>and</strong> thermal solid-state <strong>and</strong> ultrasound) [21]. While optical <strong>sensor</strong>s use prisms<br />
to sense the difference in light reflectance in order to discriminate between ridges <strong>and</strong><br />
valleys, solid state <strong>sensor</strong>s use capacitance measures (ridges exhibit higher capacitance<br />
23