

Skuba 2011 Extended Team Description - Small Size Robot League
Skuba 2011 Extended Team Description - Small Size Robot League
Skuba 2011 Extended Team Description - Small Size Robot League

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4 <strong>Robot</strong> High Level Control<br />
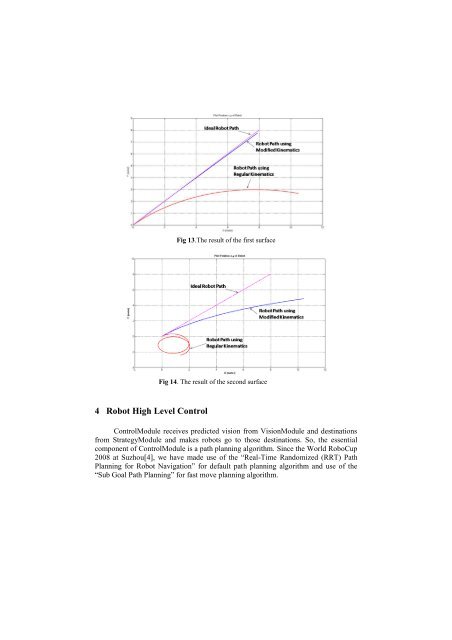
Fig 13.The result of the first surface<br />
Fig 14. The result of the second surface<br />
ControlModule receives predicted vision from VisionModule and destinations<br />
from StrategyModule and makes robots go to those destinations. So, the essential<br />
component of ControlModule is a path planning algorithm. Since the World RoboCup<br />
2008 at Suzhou[4], we have made use of the “Real-Time Randomized (RRT) Path<br />
Planning for <strong>Robot</strong> Navigation” for default path planning algorithm and use of the<br />
“Sub Goal Path Planning” for fast move planning algorithm.