- Page 1 and 2: Robot Builder’s Sourcebook
- Page 3 and 4: Robot Builder’s Sourcebook Gordon
- Page 5 and 6: Dedication For Lane. Continuing the
- Page 7 and 8: Contents For more information about
- Page 9 and 10: viii contents Electronics-Sound & M
- Page 11 and 12: x contents Robots-Walking 544 Senso
- Page 13 and 14: xii introduction Those that are lis
- Page 15 and 16: xiv Introduction • Newsgroup read
- Page 17 and 18: xvi how to use the source listings
- Page 19 and 20: This page intentionally left blank.
- Page 21 and 22: 2 SEE ALSO: Actuators Motor Control
- Page 23 and 24: 4 Actuators-motion products � (83
- Page 25 and 26: 6 Actuators-motion products � sal
- Page 27 and 28: 8 Actuators-motion products What's
- Page 29 and 30: 10 Actuators-motion products What
- Page 31 and 32: 12 Actuators-motion products � (8
- Page 33 and 34: 14 + Actuators-Motors Motors that t
- Page 35 and 36: 16 Actuators-motors Compumotor / Pa
- Page 37 and 38: 18 Actuators-motors See other techn
- Page 39 and 40: 20 Actuators-motors Bear in mind th
- Page 41 and 42: 22 Actuators-motors Cross Compariso
- Page 43 and 44: 24 Actuators-motors There is some d
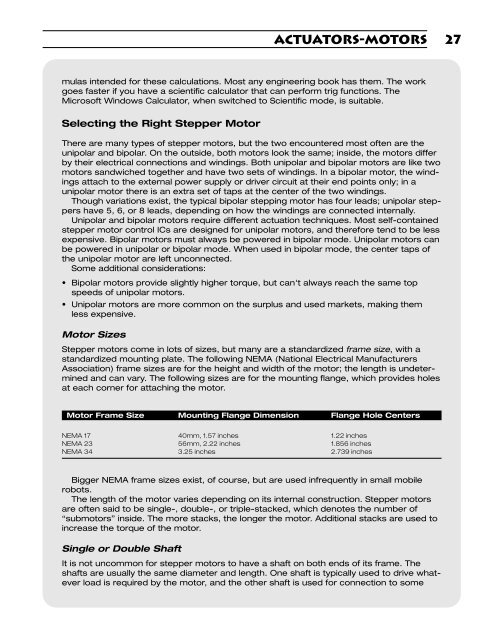
- Page 45: 26 Actuators-motors into the box an
- Page 49 and 50: 30 Actuators-motors � http://www.
- Page 51 and 52: 32 Actuators-motors Micromech 20218
- Page 53 and 54: 34 Actuators-motors you can find ma
- Page 55 and 56: 36 Superior Electric 202628 383 Mid
- Page 57 and 58: 38 Actuators-motors High powered Et
- Page 59 and 60: 40 Actuators-pneumatic In Europe th
- Page 61 and 62: 42 Actuators-pneumatic • Mosier-p
- Page 63 and 64: 44 Actuators-shape memory alloys Bu
- Page 65 and 66: 46 Bar coding �Bar Coding Bar cod
- Page 67 and 68: 48 Bar coding Using a Brother P-Tou
- Page 69 and 70: 50 Bar coding � info@symbol.com
- Page 71 and 72: 52 batteries and power Battery Mart
- Page 73 and 74: 54 batteries and power Chemical Mak
- Page 75 and 76: 56 batteries and power Common Batte
- Page 77 and 78: 58 batteries and power bly need reg
- Page 79 and 80: 60 batteries and power Pico Electro
- Page 81 and 82: 62 books { Books Books are still th
- Page 83 and 84: 64 books-robotics Robotics Universe
- Page 85 and 86: 66 books-technical U.S. Government
- Page 87 and 88: 68 books-technical Google.com searc
- Page 89 and 90: 70 books-technical Stiquito: Advanc
- Page 91 and 92: 72 books-technical Robotics Essays
- Page 93 and 94: 74 books-technical A small but high
- Page 95 and 96: 76 books-technical Entry-level text
- Page 97 and 98:
78 books-technical �CMOS Cookbook
- Page 99 and 100:
80 books-technical Use of a PC Prin
- Page 101 and 102:
82 books-technical with age just as
- Page 103 and 104:
84 communications-infrared Help—M
- Page 105 and 106:
86 communications-rf Bluetooth 2041
- Page 107 and 108:
88 communications-rf Robot Radio Li
- Page 109 and 110:
90 communications-rf North Country
- Page 111 and 112:
92 communications-rf RF Digital Cor
- Page 113 and 114:
94 competitions nize other opponent
- Page 115 and 116:
96 SEE ALSO: competitions-combat Co
- Page 117 and 118:
98 competitions-combat Movers and S
- Page 119 and 120:
100 competitions-entrant “Home of
- Page 121 and 122:
102 competitions-other � http://w
- Page 123 and 124:
104 competitions-soccer & ball play
- Page 125 and 126:
106 computers V Computers Listings
- Page 127 and 128:
108 computers-data acquisition Prai
- Page 129 and 130:
110 computers-i/o Of Inputs and Out
- Page 131 and 132:
112 • Opto I/O • Relay • Digi
- Page 133 and 134:
114 computers-single board computer
- Page 135 and 136:
116 computers-single board computer
- Page 137 and 138:
118 computers-single board computer
- Page 139 and 140:
120 distributor/wholesaler @ Distri
- Page 141 and 142:
122 distributor/wholesaler-industri
- Page 143 and 144:
124 distributor/wholesaler-industri
- Page 145 and 146:
126 distributor/wholesaler-industri
- Page 147 and 148:
128 distributor/wholesaler-other co
- Page 149 and 150:
130 @ Electronics This section enco
- Page 151 and 152:
132 electronics-circuit examples Bo
- Page 153 and 154:
134 electronics-circuit examples
- Page 155 and 156:
136 electronics-display Sample code
- Page 157 and 158:
138 electronics-display � info@se
- Page 159 and 160:
140 Of course, you're not limited t
- Page 161 and 162:
142 electronics-pcb-design � +61
- Page 163 and 164:
144 electronics-pcb-design Custom (
- Page 165 and 166:
146 electronics-pcb-production bugs
- Page 167 and 168:
148 SEE ALSO: electronics-soldering
- Page 169 and 170:
150 electronics-sound & music Makin
- Page 171 and 172:
152 electronics-sound & music • F
- Page 173 and 174:
154 electronics-sound & music SoftV
- Page 175 and 176:
156 Entertainment { Entertainment W
- Page 177 and 178:
158 Entertainment-Art Movie Poster
- Page 179 and 180:
160 Entertainment-books & movies Fo
- Page 181 and 182:
162 Entertainment-books & movies Wh
- Page 183 and 184:
164 the physical traits of the fast
- Page 185 and 186:
166 fasteners American Bolt and Scr
- Page 187 and 188:
168 fasteners � (616) 748-1246
- Page 189 and 190:
170 fasteners McFeely's Square Driv
- Page 191 and 192:
172 fasteners � (724) 452-8003
- Page 193 and 194:
174 fasteners Wicks Aircraft Supply
- Page 195 and 196:
176 fests and shows Hoosier Hills H
- Page 197 and 198:
178 internet-bulletin board/mailing
- Page 199 and 200:
180 Yahoo Groups: Rug Warrior 20374
- Page 201 and 202:
182 internet-EDU/GOVERNMENT LABS Au
- Page 203 and 204:
184 internet-EDU/GOVERNMENT LABS Co
- Page 205 and 206:
186 internet-EDU/GOVERNMENT LABS ma
- Page 207 and 208:
188 internet-EDU/GOVERNMENT LABS ar
- Page 209 and 210:
190 internet-EDU/GOVERNMENT LABS Ro
- Page 211 and 212:
192 internet-informational Autonomo
- Page 213 and 214:
194 internet-informational The Robo
- Page 215 and 216:
196 internet-informational Omniscie
- Page 217 and 218:
198 internet-informational All aboa
- Page 219 and 220:
200 internet-links Open Directory P
- Page 221 and 222:
202 Meccano Sources 202309 http://w
- Page 223 and 224:
204 internet-personal web page edge
- Page 225 and 226:
206 internet-personal web page G-Bo
- Page 227 and 228:
208 internet-personal web page Roga
- Page 229 and 230:
210 internet-plans & Guides Cricket
- Page 231 and 232:
212 One of the better instructional
- Page 233 and 234:
214 Internet-research Searching for
- Page 235 and 236:
216 internet-research stock of over
- Page 237 and 238:
218 internet-research ToyDirectory.
- Page 239 and 240:
220 internet-search Google, the kin
- Page 241 and 242:
222 internet-search Searching Wisel
- Page 243 and 244:
224 internet-search At the time of
- Page 245 and 246:
226 internet-search Google Search:
- Page 247 and 248:
228 Of course, you can view the arc
- Page 249 and 250:
230 Newsgroups: rec.crafts .metalwo
- Page 251 and 252:
232 internet-usenet newsgroups Web
- Page 253 and 254:
234 { Journals and Magazines Whethe
- Page 255 and 256:
236 journals and magazines From the
- Page 257 and 258:
238 journals and magazines Science
- Page 259 and 260:
240 kits t Kits A great way to lear
- Page 261 and 262:
242 kits-electronic Electronic Rain
- Page 263 and 264:
244 kits-electronic � +44 (0) 207
- Page 265 and 266:
246 kits-electronic Ozitronics 2026
- Page 267 and 268:
248 kits-robotics You’ll find tha
- Page 269 and 270:
250 I LEGO LEGO has become such an
- Page 271 and 272:
252 lego-general LEGO can be used a
- Page 273 and 274:
254 lego-MINDSTORMS Under the Hood
- Page 275 and 276:
256 lego-MINDSTORMS How to retrofit
- Page 277 and 278:
258 lego-MINDSTORMS RCX IO Extender
- Page 279 and 280:
260 machine framing Futura Industri
- Page 281 and 282:
262 machine framing Aluminum extrus
- Page 283 and 284:
264 machine framing Machine Framing
- Page 285 and 286:
266 � Manufacturer The following
- Page 287 and 288:
268 Manufacturer-components � (40
- Page 289 and 290:
270 Manufacturer-glues & adhesives
- Page 291 and 292:
272 Manufacturer-semiconductors •
- Page 293 and 294:
274 Manufacturer-semiconductors Ela
- Page 295 and 296:
276 Manufacturer-semiconductors bus
- Page 297 and 298:
278 Manufacturer-semiconductors Zar
- Page 299 and 300:
280 Manufacturer-tools Dremel 20213
- Page 301 and 302:
282 Manufacturer-tools � (781) 89
- Page 303 and 304:
284 materials Graybar Electric Comp
- Page 305 and 306:
286 materials The MSC Web page. Out
- Page 307 and 308:
288 WESCO International, Inc. 20397
- Page 309 and 310:
290 materials-fiberglass & carbon c
- Page 311 and 312:
292 materials-fiberglass & carbon c
- Page 313 and 314:
294 materials-foam Jim Allred Taxid
- Page 315 and 316:
296 materials-foam Sign Foam makes
- Page 317 and 318:
298 materials-lighting Sequencing e
- Page 319 and 320:
300 materials-lighting example, the
- Page 321 and 322:
302 � Materials-Metal Some lament
- Page 323 and 324:
304 materials-metal Show your patri
- Page 325 and 326:
306 materials-metal � (765) 675-8
- Page 327 and 328:
308 materials-metal Extensive listi
- Page 329 and 330:
310 materials-metal Small aircraft
- Page 331 and 332:
312 materials-other � (800) 355-2
- Page 333 and 334:
314 materials-other Useful sizes:
- Page 335 and 336:
316 materials-other Gummy Transfer
- Page 337 and 338:
318 materials-paper & plastic lamin
- Page 339 and 340:
320 materials-paper & plastic lamin
- Page 341 and 342:
322 materials-plastics Types of Pla
- Page 343 and 344:
324 materials-plastics and mold mak
- Page 345 and 346:
326 materials-plastics Plasti-kote
- Page 347 and 348:
328 materials-plastics If you’re
- Page 349 and 350:
330 materials-plastics � (614) 88
- Page 351 and 352:
332 materials-plastics � http://w
- Page 353 and 354:
334 • 1- to 2-inch diameter light
- Page 355 and 356:
336 materials-transfer film � mic
- Page 357 and 358:
338 materials-transfer film � htt
- Page 359 and 360:
340 microcontrollers-hardware � +
- Page 361 and 362:
342 microcontrollers-hardware The B
- Page 363 and 364:
344 microcontrollers-hardware Also
- Page 365 and 366:
346 microcontrollers-hardware Embed
- Page 367 and 368:
348 microcontrollers-hardware The B
- Page 369 and 370:
350 microcontrollers-hardware Suppo
- Page 371 and 372:
352 microcontrollers-hardware of wi
- Page 373 and 374:
354 microcontrollers-hardware objec
- Page 375 and 376:
356 microcontrollers-hardware Peter
- Page 377 and 378:
358 microcontrollers-hardware � (
- Page 379 and 380:
360 microcontrollers-programming
- Page 381 and 382:
362 microcontrollers-programming Se
- Page 383 and 384:
364 microcontrollers-software Crown
- Page 385 and 386:
366 + Motor Control In this section
- Page 387 and 388:
368 • System Calculations-Linear
- Page 389 and 390:
370 motor control � (858) 450-102
- Page 391 and 392:
372 motor control J R Kerr 203854 9
- Page 393 and 394:
374 motor control Informational pag
- Page 395 and 396:
376 motor control � (973) 423-239
- Page 397 and 398:
378 motor control robot, but also s
- Page 399 and 400:
380 outside-of-the-box �Outside-o
- Page 401 and 402:
382 Portal xPortal The listings in
- Page 403 and 404:
384 Portal-programming Pekee.fr htt
- Page 405 and 406:
386 Portal-robotics Robot Channel,
- Page 407 and 408:
388 power transmission � sales@be
- Page 409 and 410:
390 power transmission Roller Chain
- Page 411 and 412:
392 power transmission Drives, Inco
- Page 413 and 414:
394 power transmission A spur gear,
- Page 415 and 416:
396 power transmission matic and hy
- Page 417 and 418:
398 power transmission trade. The c
- Page 419 and 420:
400 power transmission RMB Roulemen
- Page 421 and 422:
402 power transmission The company
- Page 423 and 424:
404 power transmission you’re bui
- Page 425 and 426:
406 professional societies Annual c
- Page 427 and 428:
408 Programming-examples Fawcette T
- Page 429 and 430:
410 Programming-languages Opensourc
- Page 431 and 432:
412 Programming-platforms & softwar
- Page 433 and 434:
414 Programming-robotic simulations
- Page 435 and 436:
416 Programming-telerobotics Autono
- Page 437 and 438:
418 :Radio Control Though not prima
- Page 439 and 440:
420 radio control Hobbico is a mast
- Page 441 and 442:
422 radio control RC Yellow Pages.
- Page 443 and 444:
424 radio control an airplane. Obvi
- Page 445 and 446:
426 Walther’s Model Railroad Mall
- Page 447 and 448:
428 radio control-accessories � (
- Page 449 and 450:
430 radio control-servo control Rev
- Page 451 and 452:
432 radio control-servo control Rol
- Page 453 and 454:
434 radio control-servos Hobby Hors
- Page 455 and 456:
436 retail �Retail The retail est
- Page 457 and 458:
438 �Retail-Armatures & Doll Part
- Page 459 and 460:
440 retail-armatures & doll parts S
- Page 461 and 462:
442 retail-arts & crafts � http:/
- Page 463 and 464:
444 retail-arts & crafts Hobby Lobb
- Page 465 and 466:
446 retail-arts & crafts � (800)
- Page 467 and 468:
448 retail-auctions • Toys & Hobb
- Page 469 and 470:
450 � info@govliquidation.com �
- Page 471 and 472:
452 up to determine which stuff is
- Page 473 and 474:
454 retail-discount & department Li
- Page 475 and 476:
456 retail-educational supply � l
- Page 477 and 478:
458 retail-general electronics Loca
- Page 479 and 480:
460 retail-general electronics AE A
- Page 481 and 482:
462 retail-general electronics A pr
- Page 483 and 484:
464 retail-general electronics Spec
- Page 485 and 486:
466 retail-general electronics Aust
- Page 487 and 488:
468 retail-general electronics �
- Page 489 and 490:
470 retail-general electronics Of c
- Page 491 and 492:
472 retail-general electronics MCM
- Page 493 and 494:
474 retail-general electronics �
- Page 495 and 496:
476 Tech America retail-general ele
- Page 497 and 498:
478 retail-hardware & home improvem
- Page 499 and 500:
480 retail-hardware & home improvem
- Page 501 and 502:
482 retail-office supplies Supplies
- Page 503 and 504:
484 retail-opticals and lasers Gene
- Page 505 and 506:
486 retail-other Darby Drug Co., In
- Page 507 and 508:
488 retail-other Nelson Appliance R
- Page 509 and 510:
490 video, and tools sections will
- Page 511 and 512:
492 retail-other materials Where to
- Page 513 and 514:
494 retail-robotics specialty • P
- Page 515 and 516:
496 retail-robotics specialty • S
- Page 517 and 518:
498 retail-robotics specialty Robot
- Page 519 and 520:
500 retail-robotics specialty � 1
- Page 521 and 522:
502 retail-science • Optics-Every
- Page 523 and 524:
504 retail-science • Tamiya Educa
- Page 525 and 526:
506 retail-science As you can imagi
- Page 527 and 528:
508 @ Retail-Surplus Electronics Su
- Page 529 and 530:
510 retail-surplus electronics BCD
- Page 531 and 532:
512 retail-surplus electronics �
- Page 533 and 534:
514 retail-surplus electronics tran
- Page 535 and 536:
516 retail-surplus mechanical New a
- Page 537 and 538:
518 retail-surplus mechanical Gatew
- Page 539 and 540:
520 servo motors and related hardwa
- Page 541 and 542:
522 retail-train & hobby � (800)
- Page 543 and 544:
524 retail-train & hobby Hobbylinc.
- Page 545 and 546:
526 t Robots You’ll find real, wo
- Page 547 and 548:
528 robots-beam � (403) 226-3741
- Page 549 and 550:
530 robots-experimental t Robots-Ex
- Page 551 and 552:
532 robots-hobby & kit � stevejon
- Page 553 and 554:
534 robots-hobby & kit Internationa
- Page 555 and 556:
536 robots-hobby & kit ple, the com
- Page 557 and 558:
538 robots-hobby & kit research rob
- Page 559 and 560:
540 robots-industrial/research �
- Page 561 and 562:
542 robots-industrial/research Kita
- Page 563 and 564:
544 robots-personal � http://www.
- Page 565 and 566:
546 sensors �Sensors A robot with
- Page 567 and 568:
548 sensors Crossbow Technology, In
- Page 569 and 570:
550 sensors Picard Indistries 20236
- Page 571 and 572:
552 sensors-encoders � (800) 235-
- Page 573 and 574:
554 sensors-encoders require softwa
- Page 575 and 576:
556 sensors-encoders � (973) 427-
- Page 577 and 578:
558 sensors-gps You can buy accesso
- Page 579 and 580:
560 sensors-gps � (408) 615-5100
- Page 581 and 582:
562 sensors-gps When the Swiss see
- Page 583 and 584:
564 sensors-optical Proximity Sensi
- Page 585 and 586:
566 sensors-optical Maker of optica
- Page 587 and 588:
568 sensors-other Making a Conducti
- Page 589 and 590:
570 sensors-other Sensing Touch wit
- Page 591 and 592:
572 sensors-other Fancy sensors for
- Page 593 and 594:
574 sensors-rfid Radio Frequency Id
- Page 595 and 596:
576 sensors-strain gauges & load ce
- Page 597 and 598:
578 sensors-tilt & accelerometer di
- Page 599 and 600:
580 sensors-tilt & accelerometer
- Page 601 and 602:
582 sensors-ultrasonic Ultrasonic D
- Page 603 and 604:
584 sensors-ultrasonic � (781) 74
- Page 605 and 606:
586 sensors-ultrasonic Robobix 2037
- Page 607 and 608:
588 ” Supplies-Casting & Mold Mak
- Page 609 and 610:
590 supplies-casting & mold making
- Page 611 and 612:
592 supplies-casting & mold making
- Page 613 and 614:
594 supplies-casting & mold making
- Page 615 and 616:
596 supplies-casting & mold making
- Page 617 and 618:
598 supplies-casting & mold making
- Page 619 and 620:
600 supplies-casting & mold making
- Page 621 and 622:
602 The listings in the section are
- Page 623 and 624:
604 supplies-glues & adhesives avai
- Page 625 and 626:
606 supplies-paints Manufacturers o
- Page 627 and 628:
608 test and measurement � (847)
- Page 629 and 630:
610 test and measurement Do You Nee
- Page 631 and 632:
612 test and measurement Logic Prob
- Page 633 and 634:
614 tools House of Tools 203829 #10
- Page 635 and 636:
616 tools • Go-Kart parts (such a
- Page 637 and 638:
618 tools � (800) 321-9260 � ht
- Page 639 and 640:
620 tools-cnc CNC Routers For the r
- Page 641 and 642:
622 tools-cnc CNC Retro-Fit Links.
- Page 643 and 644:
624 tools-cnc machine from computer
- Page 645 and 646:
626 tools-hand • Chesco-hex tools
- Page 647 and 648:
628 tools-hand Brookstone Company,
- Page 649 and 650:
630 tools-machinery � (570) 549-3
- Page 651 and 652:
632 tools-power Delta Machinery htt
- Page 653 and 654:
634 tools-precision & miniature Car
- Page 655 and 656:
636 tools-precision & miniature She
- Page 657 and 658:
638 toys Toys Some of the earliest
- Page 659 and 660:
640 toys Toys"R"Us 203887 461 From
- Page 661 and 662:
642 toys-construction EduBots 20242
- Page 663 and 664:
644 toys-construction Specialty rob
- Page 665 and 666:
646 toys-construction Model A Techn
- Page 667 and 668:
648 toys-construction Timberdoodle
- Page 669 and 670:
650 toys-robots � Obiwall@aol.com
- Page 671 and 672:
652 toys-robots Rocket USA 202075 7
- Page 673 and 674:
654 user groups Web page for Cybot
- Page 675 and 676:
656 user groups in electronics for
- Page 677 and 678:
658 user groups SRS has a major pre
- Page 679 and 680:
660 video �Video Low-cost video c
- Page 681 and 682:
662 video-cameras
- Page 683 and 684:
664 video-cameras Better Eyes to Se
- Page 685 and 686:
666 video-cameras Super Circuits We
- Page 687 and 688:
668 video-imagers Video Images: Ana
- Page 689 and 690:
670 video-programming & apis QCUIAG
- Page 691 and 692:
672 G Wheels and Casters If it roll
- Page 693 and 694:
674 wheels & casters � (800) 835-
- Page 695 and 696:
676 wheels & casters Du-Bro Product
- Page 697 and 698:
678 wheels & casters directional ca
- Page 699 and 700:
680 � (630) 858-9161 � (630) 85
- Page 701 and 702:
This page intentionally left blank.
- Page 703 and 704:
684 appendix a: Yellow Pages—Firs
- Page 705 and 706:
686 appendix a: Yellow Pages—Firs
- Page 707 and 708:
688 appendix a: Yellow Pages—Firs
- Page 709 and 710:
690 company reference Computers-Sin
- Page 711 and 712:
692 company reference Retail-Surplu
- Page 713 and 714:
694 company reference Tools-Accesso
- Page 715 and 716:
696 company reference Robots-Person
- Page 717 and 718:
698 company reference International
- Page 719 and 720:
700 company reference Microcontroll
- Page 721 and 722:
702 company reference Retail-Scienc
- Page 723 and 724:
704 company reference Sensors-Strai
- Page 725 and 726:
706 company reference Toys-Construc
- Page 727 and 728:
708 where to find it Retail-General
- Page 729 and 730:
710 where to find it Communications
- Page 731:
About the Author Gordon McComb is a