SysML (Systems Modeling Language) und UML ... - Microconsult.de
SysML (Systems Modeling Language) und UML ... - Microconsult.de
SysML (Systems Modeling Language) und UML ... - Microconsult.de

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
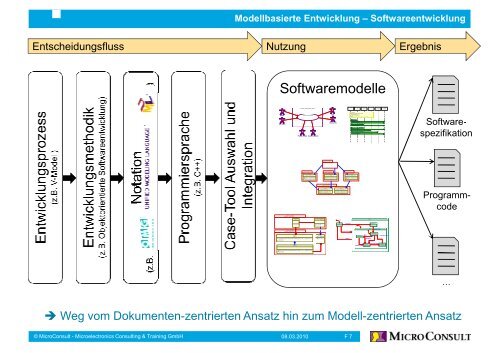
Mo<strong>de</strong>llbasierte Entwicklung – Softwareentwicklung<br />
Entscheidungsfluss Nutzung Ergebnis<br />
Softwaremo<strong>de</strong>lle<br />
Sensor<br />
Input_Device<br />
«Software_Subsystem»<br />
Software_Subsystem_1<br />
«Software_Subsystem»<br />
Software_Subsystem_2<br />
C_SS_1<br />
System_Subsystem_Name<br />
Main_Functionality<br />
Physical_Interface System_Subsystem<br />
1<br />
«Interface»<br />
I_SS_2<br />
«Software_Subsystem»<br />
Software_Subsystem_2<br />
«Interface»<br />
I_Software_Subsystem_2<br />
operation_1(argument:int):int<br />
operation_2(argument:int):int<br />
1 1<br />
registerSS1CalbackObject(ptrSS1CallbackObject:I_SS_1_Callback*):void<br />
op_2():void<br />
© MicroConsult - Microelectronics Consulting & Training GmbH 08.03.2010 F 7<br />
C_SS_2<br />
registerSS1CalbackObject(ptrSS1CallbackObject:I_SS_1_Callback*):void<br />
op_2():void<br />
«Software_Subsystem»<br />
Software_Subsystem_1<br />
Actor<br />
Output_Device<br />
«Software_Subsystem»<br />
Software_Subsystem_3<br />
«Interface»<br />
I_Software_Subsystem_3<br />
operation_1(argument:int):int<br />
operation_2(argument:int):int<br />
«Software_Subsystem»<br />
Software_Subsystem_5<br />
«Interface»<br />
I_Software_Subsystem_5_1<br />
operation_1(argument:int):int<br />
operation_2(argument:int):int<br />
C_SS_1_Callback<br />
op_1():void<br />
«Interface»<br />
I_SS_1_Callback<br />
op_1():void<br />
1<br />
«Interface»<br />
I_Software_Subsystem_5_2<br />
operation_1(argument:int):int<br />
operation_2(argument:int):int<br />
/init();<br />
off<br />
ENV<br />
evTemporise<br />
:AC_Mo<strong>de</strong>Sel<br />
ect<br />
:AC_Increase<br />
Speed<br />
Pre-Condition:<br />
- Motor control system mo<strong>de</strong> is direct<br />
- The current speed is +5<br />
Use-Case: UC_Mo<strong>de</strong>Control<br />
Scenario:<br />
- Changing the current speed to +2 in preselect mo<strong>de</strong><br />
«Software_Subsystem»<br />
Software_Subsystem_4<br />
evMo<strong>de</strong>Select()<br />
printMo<strong>de</strong>(Preselect)<br />
printPreselectSpeed(0)<br />
evIncrease()<br />
printPreselectSpeed(1)<br />
evIncrease()<br />
printPreselectSpeed(2)<br />
evEnter()<br />
setCurrentSpeed(PreselectSpeed)<br />
printPreselectSpeed(0)<br />
«Interface»<br />
I_Software_Subsystem_4<br />
operation_1(argument:int):int<br />
operation_2(argument:int):int<br />
evDisarm<br />
evArm<br />
evDoor<br />
entering<br />
:AC_Enter :AC_Synchro :AC_Characte<br />
n_Motor r_Display<br />
armed<br />
active<br />
evMovement<br />
exiting<br />
tm(EXIT_TIME)<br />
<strong>de</strong>tecting<br />
evMovement<br />
tm(SILENCE_TIME)<br />
tm(ALARM_TIME)<br />
intrusion<br />
silence<br />
tm(ENTRY_TIME)<br />
Software- Softwarespezifikation<br />
Programmco<strong>de</strong><br />
Weg vom Dokumenten-zentrierten Ansatz hin zum Mo<strong>de</strong>ll-zentrierten Ansatz<br />
…