Introduction to Bounded Model Checking Armin Biere FATS Seminar
Introduction to Bounded Model Checking Armin Biere FATS Seminar
Introduction to Bounded Model Checking Armin Biere FATS Seminar

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
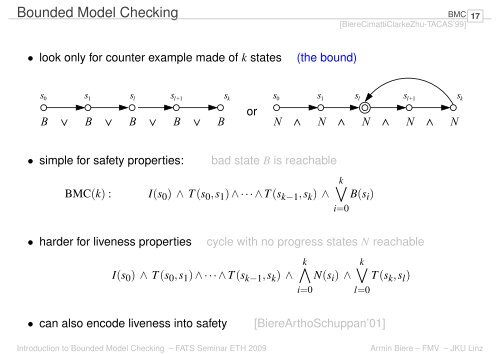
<strong>Bounded</strong> <strong>Model</strong> <strong>Checking</strong> BMC<br />
[<strong>Biere</strong>CimattiClarkeZhu-TACAS’99] 17<br />
• look only for counter example made of k states (the bound)<br />
s0 s1 sl sl+1 sk B<br />
B<br />
B<br />
B<br />
• simple for safety properties: bad state B is reachable<br />
BMC(k) : I(s0) ∧ T (s0,s1) ∧ ··· ∧ T (s k−1,s k) ∧<br />
B<br />
or<br />
s0 s1 sl sl+1 sk N<br />
N<br />
k_<br />
i=0<br />
N<br />
B(si)<br />
• harder for liveness properties cycle with no progress states N reachable<br />
I(s0) ∧ T (s0,s1) ∧ ··· ∧ T (s k−1,s k) ∧<br />
k^<br />
i=0<br />
N(si) ∧<br />
• can also encode liveness in<strong>to</strong> safety [<strong>Biere</strong>ArthoSchuppan’01]<br />
k_<br />
l=0<br />
N<br />
T (s k,s l)<br />
<strong>Introduction</strong> <strong>to</strong> <strong>Bounded</strong> <strong>Model</strong> <strong>Checking</strong> – <strong>FATS</strong> <strong>Seminar</strong> ETH 2009 <strong>Armin</strong> <strong>Biere</strong> – FMV – JKU Linz<br />
N