Planning: Part 3 Planning Graphs
Planning: Part 3 Planning Graphs
Planning: Part 3 Planning Graphs

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
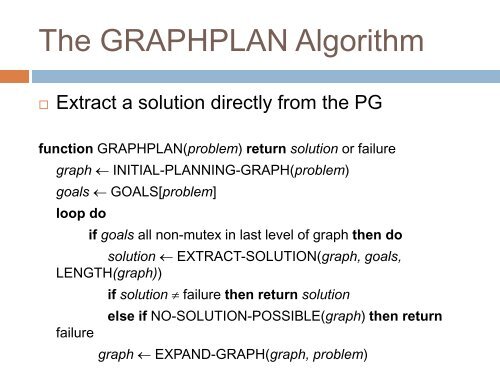
The GRAPHPLAN Algorithm<br />
Extract a solution directly from the PG<br />
function GRAPHPLAN(problem) return solution or failure<br />
graph INITIAL-PLANNING-GRAPH(problem)<br />
goals GOALS[problem]<br />
loop do<br />
if goals all non-mutex in last level of graph then do<br />
solution EXTRACT-SOLUTION(graph, goals,<br />
LENGTH(graph))<br />
failure<br />
if solution failure then return solution<br />
else if NO-SOLUTION-POSSIBLE(graph) then return<br />
graph EXPAND-GRAPH(graph, problem)







![RANSAC [Fischler, Bolles '81]](https://img.yumpu.com/17549294/1/190x143/ransac-fischler-bolles-81.jpg?quality=85)