Angular damping coefficient of the in vivo human knee joint.
Angular damping coefficient of the in vivo human knee joint.
Angular damping coefficient of the in vivo human knee joint.

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
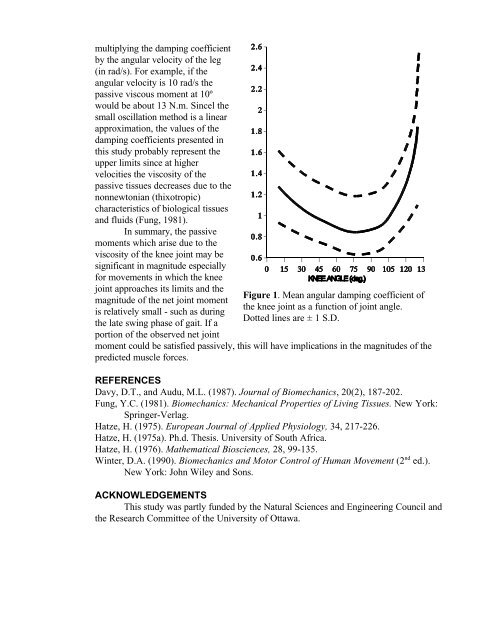
multiply<strong>in</strong>g <strong>the</strong> <strong>damp<strong>in</strong>g</strong> <strong>coefficient</strong><br />
by <strong>the</strong> angular velocity <strong>of</strong> <strong>the</strong> leg<br />
(<strong>in</strong> rad/s). For example, if <strong>the</strong><br />
angular velocity is 10 rad/s <strong>the</strong><br />
passive viscous moment at 10º<br />
would be about 13 N.m. S<strong>in</strong>cel <strong>the</strong><br />
small oscillation method is a l<strong>in</strong>ear<br />
approximation, <strong>the</strong> values <strong>of</strong> <strong>the</strong><br />
<strong>damp<strong>in</strong>g</strong> <strong>coefficient</strong>s presented <strong>in</strong><br />
this study probably represent <strong>the</strong><br />
upper limits s<strong>in</strong>ce at higher<br />
velocities <strong>the</strong> viscosity <strong>of</strong> <strong>the</strong><br />
passive tissues decreases due to <strong>the</strong><br />
nonnewtonian (thixotropic)<br />
characteristics <strong>of</strong> biological tissues<br />
and fluids (Fung, 1981).<br />
In summary, <strong>the</strong> passive<br />
moments which arise due to <strong>the</strong><br />
viscosity <strong>of</strong> <strong>the</strong> <strong>knee</strong> jo<strong>in</strong>t may be<br />
significant <strong>in</strong> magnitude especially<br />
for movements <strong>in</strong> which <strong>the</strong> <strong>knee</strong><br />
jo<strong>in</strong>t approaches its limits and <strong>the</strong><br />
magnitude <strong>of</strong> <strong>the</strong> net jo<strong>in</strong>t moment<br />
is relatively small - such as dur<strong>in</strong>g<br />
<strong>the</strong> late sw<strong>in</strong>g phase <strong>of</strong> gait. If a<br />
portion <strong>of</strong> <strong>the</strong> observed net jo<strong>in</strong>t<br />
Figure 1. Mean angular <strong>damp<strong>in</strong>g</strong> <strong>coefficient</strong> <strong>of</strong><br />
<strong>the</strong> <strong>knee</strong> jo<strong>in</strong>t as a function <strong>of</strong> jo<strong>in</strong>t angle.<br />
Dotted l<strong>in</strong>es are ± 1 S.D.<br />
moment could be satisfied passively, this will have implications <strong>in</strong> <strong>the</strong> magnitudes <strong>of</strong> <strong>the</strong><br />
predicted muscle forces.<br />
REFERENCES<br />
Davy, D.T., and Audu, M.L. (1987). Journal <strong>of</strong> Biomechanics, 20(2), 187-202.<br />
Fung, Y.C. (1981). Biomechanics: Mechanical Properties <strong>of</strong> Liv<strong>in</strong>g Tissues. New York:<br />
Spr<strong>in</strong>ger-Verlag.<br />
Hatze, H. (1975). European Journal <strong>of</strong> Applied Physiology, 34, 217-226.<br />
Hatze, H. (1975a). Ph.d. Thesis. University <strong>of</strong> South Africa.<br />
Hatze, H. (1976). Ma<strong>the</strong>matical Biosciences, 28, 99-135.<br />
W<strong>in</strong>ter, D.A. (1990). Biomechanics and Motor Control <strong>of</strong> Human Movement (2 nd ed.).<br />
New York: John Wiley and Sons.<br />
ACKNOWLEDGEMENTS<br />
This study was partly funded by <strong>the</strong> Natural Sciences and Eng<strong>in</strong>eer<strong>in</strong>g Council and<br />
<strong>the</strong> Research Committee <strong>of</strong> <strong>the</strong> University <strong>of</strong> Ottawa.