Bosch Rexroth IndraDrive Quick Startup Guide - Wittenstein
Bosch Rexroth IndraDrive Quick Startup Guide - Wittenstein
Bosch Rexroth IndraDrive Quick Startup Guide - Wittenstein

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
TPM +<br />
<strong>Quick</strong> <strong>Startup</strong> <strong>Guide</strong><br />
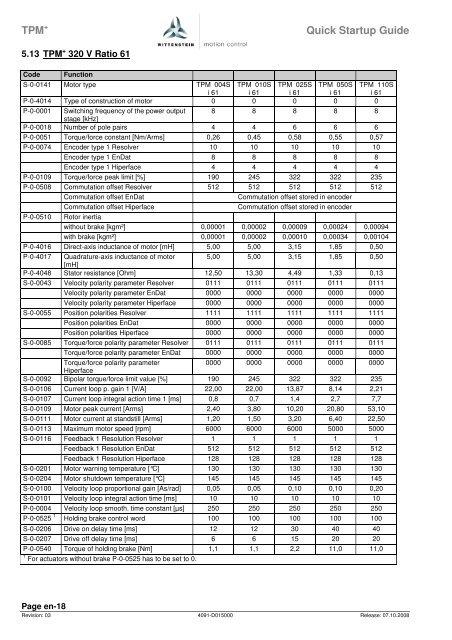
5.13 TPM + 320 V Ratio 61<br />
Code<br />
Function<br />
S-0-0141 Motor type TPM 004S<br />
i 61<br />
TPM 010S<br />
i 61<br />
TPM 025S<br />
i 61<br />
TPM 050S<br />
i 61<br />
TPM 110S<br />
i 61<br />
P-0-4014 Type of construction of motor 0 0 0 0 0<br />
P-0-0001 Switching frequency of the power output 8 8 8 8 8<br />
stage [kHz]<br />
P-0-0018 Number of pole pairs 4 4 6 6 6<br />
P-0-0051 Torque/force constant [Nm/Arms] 0,26 0,45 0,58 0,55 0,57<br />
P-0-0074 Encoder type 1 Resolver 10 10 10 10 10<br />
Encoder type 1 EnDat 8 8 8 8 8<br />
Encoder type 1 Hiperface 4 4 4 4 4<br />
P-0-0109 Torque/force peak limit [%] 190 245 322 322 235<br />
P-0-0508 Commutation offset Resolver 512 512 512 512 512<br />
Commutation offset EnDat<br />
Commutation offset stored in encoder<br />
Commutation offset Hiperface<br />
Commutation offset stored in encoder<br />
P-0-0510 Rotor inertia<br />
without brake [kgm²] 0,00001 0,00002 0,00009 0,00024 0,00094<br />
with brake [kgm²] 0,00001 0,00002 0,00010 0,00034 0,00104<br />
P-0-4016 Direct-axis inductance of motor [mH] 5,00 5,00 3,15 1,85 0,50<br />
P-0-4017 Quadrature-axis inductance of motor 5,00 5,00 3,15 1,85 0,50<br />
[mH]<br />
P-0-4048 Stator resistance [Ohm] 12,50 13,30 4,49 1,33 0,13<br />
S-0-0043 Velocity polarity parameter Resolver 0111 0111 0111 0111 0111<br />
Velocity polarity parameter EnDat 0000 0000 0000 0000 0000<br />
Velocity polarity parameter Hiperface 0000 0000 0000 0000 0000<br />
S-0-0055 Position polarities Resolver 1111 1111 1111 1111 1111<br />
Position polarities EnDat 0000 0000 0000 0000 0000<br />
Position polarities Hiperface 0000 0000 0000 0000 0000<br />
S-0-0085 Torque/force polarity parameter Resolver 0111 0111 0111 0111 0111<br />
Torque/force polarity parameter EnDat 0000 0000 0000 0000 0000<br />
Torque/force polarity parameter<br />
0000 0000 0000 0000 0000<br />
Hiperface<br />
S-0-0092 Bipolar torque/force limit value [%] 190 245 322 322 235<br />
S-0-0106 Current loop p. gain 1 [V/A] 22,00 22,00 13,87 8,14 2,21<br />
S-0-0107 Current loop integral action time 1 [ms] 0,8 0,7 1,4 2,7 7,7<br />
S-0-0109 Motor peak current [Arms] 2,40 3,80 10,20 20,80 53,10<br />
S-0-0111 Motor current at standstill [Arms] 1,20 1,50 3,20 6,40 22,50<br />
S-0-0113 Maximum motor speed [rpm] 6000 6000 6000 5000 5000<br />
S-0-0116 Feedback 1 Resolution Resolver 1 1 1 1 1<br />
Feedback 1 Resolution EnDat 512 512 512 512 512<br />
Feedback 1 Resolution Hiperface 128 128 128 128 128<br />
S-0-0201 Motor warning temperature [°C] 130 130 130 130 130<br />
S-0-0204 Motor shutdown temperature [°C] 145 145 145 145 145<br />
S-0-0100 Velocity loop proportional gain [As/rad] 0,05 0,05 0,10 0,10 0,20<br />
S-0-0101 Velocity loop integral action time [ms] 10 10 10 10 10<br />
P-0-0004 Velocity loop smooth. time constant [µs] 250 250 250 250 250<br />
P-0-0525 1 Holding brake control word 100 100 100 100 100<br />
S-0-0206 Drive on delay time [ms] 12 12 30 40 40<br />
S-0-0207 Drive off delay time [ms] 6 6 15 20 20<br />
P-0-0540 Torque of holding brake [Nm] 1,1 1,1 2,2 11,0 11,0<br />
1 For actuators without brake P-0-0525 has to be set to 0.<br />
Page en-18<br />
Revision: 03 4091-D015000 Release: 07.10.2008