

SbornÃk vÄdeckých pracà Vysoké Å¡koly báÅské ... - Transactions
SbornÃk vÄdeckých pracà Vysoké Å¡koly báÅské ... - Transactions
SbornÃk vÄdeckých pracà Vysoké Å¡koly báÅské ... - Transactions

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
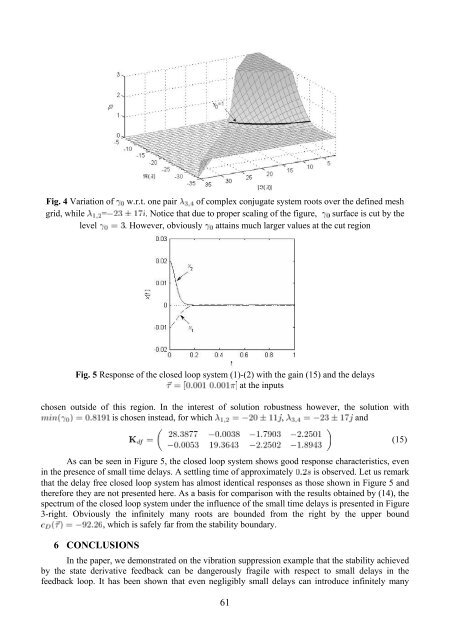
Fig. 4 Variation of w.r.t. one pair of complex conjugate system roots over the defined mesh<br />
grid, while = . Notice that due to proper scaling of the figure, surface is cut by the<br />
level . However, obviously attains much larger values at the cut region<br />
Fig. 5 Response of the closed loop system (1)-(2) with the gain (15) and the delays<br />
at the inputs<br />
chosen outside of this region. In the interest of solution robustness however, the solution with<br />
is chosen instead, for which , and<br />
As can be seen in Figure 5, the closed loop system shows good response characteristics, even<br />
in the presence of small time delays. A settling time of approximately is observed. Let us remark<br />
that the delay free closed loop system has almost identical responses as those shown in Figure 5 and<br />
therefore they are not presented here. As a basis for comparison with the results obtained by (14), the<br />
spectrum of the closed loop system under the influence of the small time delays is presented in Figure<br />
3-right. Obviously the infinitely many roots are bounded from the right by the upper bound<br />
, which is safely far from the stability boundary.<br />
6 CONCLUSIONS<br />
In the paper, we demonstrated on the vibration suppression example that the stability achieved<br />
by the state derivative feedback can be dangerously fragile with respect to small delays in the<br />
feedback loop. It has been shown that even negligibly small delays can introduce infinitely many<br />
61<br />
(15)









