Diagnostic communication with ASAM-MCD, ODX and UDS on CAN
Diagnostic communication with ASAM-MCD, ODX and UDS on CAN
Diagnostic communication with ASAM-MCD, ODX and UDS on CAN

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
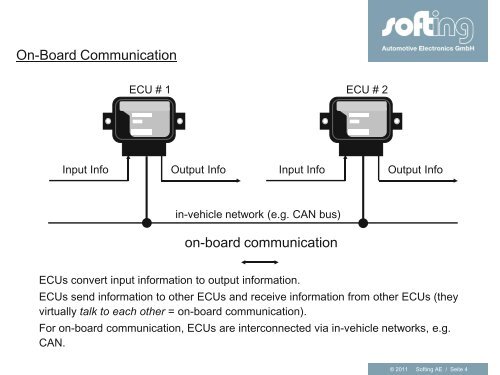
On-Board Communicati<strong>on</strong><br />
ECU # 1<br />
ECU # 2<br />
Input Info<br />
Output Info<br />
Input Info<br />
Output Info<br />
in-vehicle network (e.g. <strong>CAN</strong> bus)<br />
<strong>on</strong>-board <str<strong>on</strong>g>communicati<strong>on</strong></str<strong>on</strong>g><br />
ECUs c<strong>on</strong>vert input informati<strong>on</strong> to output informati<strong>on</strong>.<br />
ECUs send informati<strong>on</strong> to other ECUs <str<strong>on</strong>g>and</str<strong>on</strong>g> receive informati<strong>on</strong> from other ECUs (they<br />
virtually talk to each other = <strong>on</strong>-board <str<strong>on</strong>g>communicati<strong>on</strong></str<strong>on</strong>g>).<br />
For <strong>on</strong>-board <str<strong>on</strong>g>communicati<strong>on</strong></str<strong>on</strong>g>, ECUs are interc<strong>on</strong>nected via in-vehicle networks, e.g.<br />
<strong>CAN</strong>.<br />
© 2011 Softing AE / Seite 4