Object Tracking and Face Recognition in Video Streams
Object Tracking and Face Recognition in Video Streams
Object Tracking and Face Recognition in Video Streams
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
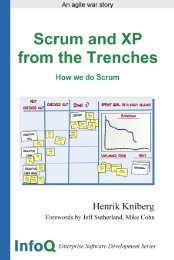
10 Chapter 2. The TLD algorithm(a) Image patch reportedby short-term tracker.(b) Exp<strong>and</strong>ed to grid po<strong>in</strong>ts.In this case, the object is centred<strong>in</strong> the exp<strong>and</strong>ed patch.(c) Translation (d) Scal<strong>in</strong>g (e) RotationFigure 2.5: The aff<strong>in</strong>e transformations applied on an image patch dur<strong>in</strong>g tra<strong>in</strong><strong>in</strong>g. Thepatch reported by the tracker is first exp<strong>and</strong>ed to match one of the detector’s slid<strong>in</strong>gw<strong>in</strong>dow positions. A number of positive examples are then generated from the patch,where each example r<strong>and</strong>omly comb<strong>in</strong>es the aff<strong>in</strong>e transformations.i.e. if the calculated value is below a certa<strong>in</strong> threshold. Similarly, negative examples are onlyused if the component th<strong>in</strong>ks the patch does depict the object, i.e. if the calculated value isabove a certa<strong>in</strong> threshold. In other words, the area reported by the tracker is assumed tobe the correct patch, so components that disagree try to learn from it. Figure 2.6 illustratesthe concept.S<strong>in</strong>ce the tra<strong>in</strong><strong>in</strong>g sets are based on the location reported by the tracker, the result of thetracker must be considered sufficiently good if the tra<strong>in</strong><strong>in</strong>g stage is to be applied: the trackerresult must be valid, <strong>and</strong> the tracker must be more confident than the detector. Additionally,if the tracker was not deemed good enough <strong>in</strong> the previous frame, the confidence of thetracker must be above a certa<strong>in</strong> threshold, i.e. the confidence of the tracker must be largeenough for tra<strong>in</strong><strong>in</strong>g to start up aga<strong>in</strong>.Initial tra<strong>in</strong><strong>in</strong>g examples are generated from the first frame, where the bound<strong>in</strong>g box ofthe object is known. As such, there is no need to take <strong>in</strong>to account the confidence or theforward-backward error. Positive examples are generated from the image patch def<strong>in</strong>ed bythe bound<strong>in</strong>g box, <strong>and</strong> negative examples are generated from other parts of the frame.2.5 SummaryThe overall flow of TLD is shown <strong>in</strong> Figure 2.7. The short-term tracker <strong>and</strong> the objectdetector are both run on the current frame. If neither component reports a valid result, theobject is considered lost until it is re-detected. Otherwise, the result of the more confidentcomponent is reported. Furthermore, if the tracker is more confident than the detector, thelearn<strong>in</strong>g stage is applied.