Inertial Explorer® - Canal Geomatics
Inertial Explorer® - Canal Geomatics
Inertial Explorer® - Canal Geomatics

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Inertial</strong> Explorer<br />
<strong>Inertial</strong> Explorer Interface<br />
• GNSSandIMUprocessingunderonecommon<br />
interface<br />
• Simultaneousforwardandreverseprocessing<br />
for both GNSS and IMU data<br />
• Numerous GNSS and IMU specific quality<br />
control plots<br />
• Shows GNSS and IMU data coverage<br />
and gaps<br />
• Interpolatesuptotwoexternaleventtriggers<br />
• Flexible export tool permits reproduction<br />
of most ASCII formats<br />
• Outputs specialized variables such as<br />
IMU rates and accelerations<br />
• Position and velocity can be translated to<br />
another location on vehicle or craft<br />
• Attitude can be corrected for orientation<br />
difference between IMU and another sensor<br />
• Outputsw-p-kanglesforphotogrammetry<br />
• Solvesforcamera-IMUorientationdifference<br />
given w-p-k angles from an external source 1<br />
• Saves processing history<br />
• Precise Point Positioning (PPP) Module<br />
1-800-NOVATEL (U.S. & Canada) or 403-295-4900<br />
Europe +44 (0) 1993 852-436<br />
SE Asia & Australia +61 (0) 400 833-601<br />
sales@novatel.com<br />
novatel.com<br />
GNSS Processing<br />
• Multiplereceivermanufacturessupported<br />
see GrafNav product sheet<br />
IMU Processing<br />
• Coarse,fineandkinematicalignmentsavailable<br />
• Pre-loaded with error models for most<br />
popular IMU types<br />
• Users can create their own error models<br />
• Supports IMU only processing<br />
• Extensive control over GNSS update<br />
measurements<br />
• GNSS-IMU lever arms can be entered<br />
or solved<br />
• Supports zero velocity updates<br />
• Supports coordinate updates<br />
• Utilizes DMI/odometer measurements<br />
• Includes built-in RTS back-smoother<br />
• Permits utilization of external trajectories<br />
• Support for non-standard orientation<br />
installation<br />
• Loosely coupled option<br />
• Tightly coupled option 2<br />
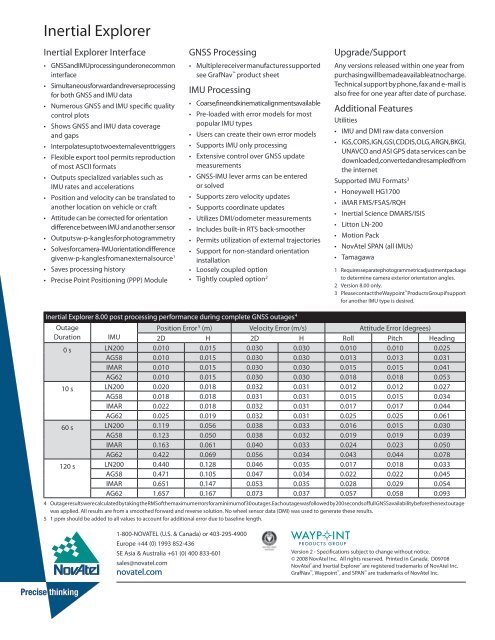
<strong>Inertial</strong> Explorer 8.00 post processing performance during complete GNSS outages 4<br />
Upgrade/Support<br />
Any versions released within one year from<br />
purchasing will be made available at no charge.<br />
Technical support by phone, fax and e-mail is<br />
also free for one year after date of purchase.<br />
Additional Features<br />
Utilities<br />
• IMU and DMI raw data conversion<br />
• IGS,CORS,IGN,GSI,CDDIS,OLG,ARGN,BKGI,<br />
UNAVCO and ASI GPS data services can be<br />
downloaded, converted and resampled from<br />
the internet<br />
Supported IMU Formats 3<br />
• Honeywell HG1700<br />
• iMAR FMS/FSAS/RQH<br />
• <strong>Inertial</strong> Science DMARS/ISIS<br />
• Litton LN-200<br />
• Motion Pack<br />
• NovAtel SPAN (all IMUs)<br />
• Tamagawa<br />
1 Requires separate photogrammetric adjustment package<br />
to determine camera exterior orientation angles.<br />
2 Version 8.00 only.<br />
3 Please contact the Waypoint Products Group if support<br />
for another IMU type is desired.<br />
Outage<br />
Position Error<br />
Duration IMU<br />
5 (m) Velocity Error (m/s) Attitude Error (degrees)<br />
2D H 2D H Roll Pitch Heading<br />
0 s LN200 0.010 0.015 0.030 0.030 0.010 0.010 0.025<br />
AG58 0.010 0.015 0.030 0.030 0.013 0.013 0.031<br />
IMAR 0.010 0.015 0.030 0.030 0.015 0.015 0.041<br />
AG62 0.010 0.015 0.030 0.030 0.018 0.018 0.053<br />
10 s LN200 0.020 0.018 0.032 0.031 0.012 0.012 0.027<br />
AG58 0.018 0.018 0.031 0.031 0.015 0.015 0.034<br />
IMAR 0.022 0.018 0.032 0.031 0.017 0.017 0.044<br />
AG62 0.025 0.019 0.032 0.031 0.025 0.025 0.061<br />
60 s LN200 0.119 0.056 0.038 0.033 0.016 0.015 0.030<br />
AG58 0.123 0.050 0.038 0.032 0.019 0.019 0.039<br />
IMAR 0.163 0.061 0.040 0.033 0.024 0.023 0.050<br />
AG62 0.422 0.069 0.056 0.034 0.043 0.044 0.078<br />
120 s LN200 0.440 0.128 0.046 0.035 0.017 0.018 0.033<br />
AG58 0.471 0.105 0.047 0.034 0.022 0.022 0.045<br />
IMAR 0.651 0.147 0.053 0.035 0.028 0.029 0.054<br />
AG62 1.657 0.167 0.073 0.037 0.057 0.058 0.093<br />
4 Outage results were calculated by taking the RMS of the maximum errors for a minimum of 30 outages. Each outage was followed by 200 seconds of full GNSS availability before the next outage<br />
was applied. All results are from a smoothed forward and reverse solution. No wheel sensor data (DMI) was used to generate these results.<br />
5 1 ppm should be added to all values to account for additional error due to baseline length.<br />
Version 2 - Specifications subject to change without notice.<br />
© 2008 NovAtel Inc. All rights reserved. Printed in Canada. D09708<br />
NovAtel ® and <strong>Inertial</strong> Explorer ® are registered trademarks of NovAtel Inc.<br />
GrafNav , Waypoint , and SPAN are trademarks of NovAtel Inc.