

Mentor II
Ð ÑководÑÑво полÑзоваÑÐµÐ»Ñ Mentor II
Ð ÑководÑÑво полÑзоваÑÐµÐ»Ñ Mentor II

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
7.3.4 Ослабление поля<br />
В нашем примере максимальное напряжение на якоре равно 500 В<br />
пост. тока. Если требуется ослабление поля, то типичная<br />
практическая настройка для точки пересечения противо-ЭДС 06.07<br />
должна быть на 15-20 В ниже максимального напряжения на якоре.<br />
Для примера настроим 06.07 = 480.<br />
По мере уменьшения напряжения поле начнет линейно<br />
уменьшаться до значения, настроенного в параметре 06.10.<br />
Поскольку настройка параметра обратной связи по току<br />
возбуждения 06.11 в этом примере равна 204 - диапазон 2 A - то<br />
минимум будет выбранной долей от него. Предположим, что<br />
выбрано 90%. Тогда:<br />
Выбранное значение 0,9<br />
------------------------------------------------------------------------------- = ------- = 0,45<br />
Настройка обратной связи 2,0<br />
Настройка минимального тока возбуждения равна:<br />
06.10 = 0.45 x 1000= 450<br />
Для правильной работы режима ослабления тока необходима<br />
обратная связь по скорости (обратная связь по напряжению на<br />
якоре не может обеспечить надежное управление). Поэтому<br />
параметр 03.13 нужно настроить на 0 для тахометра обратной связи<br />
постоянного или переменного тока, а масштаб скорости 03.16 нужно<br />
настроить в 250, что соответствует максимальной допустимой<br />
скорости двигателя 2500 об/мин. После этого параметр 03.03 будет<br />
правильно считывать фактическую скорость двигателя в об/мин.<br />
Если будет использоваться энкодер (импульсный тахометр), то<br />
параметр 03.12 нужно настроить на 1, и необходимо соответственно<br />
настроить параметр масштаба энкодера 03.14. Значение параметра<br />
03.14 зависит от :<br />
Максимальной требуемой скорости двигателя и<br />
Количество импульсов на один оборот энкодера (импульсного<br />
тахометра).<br />
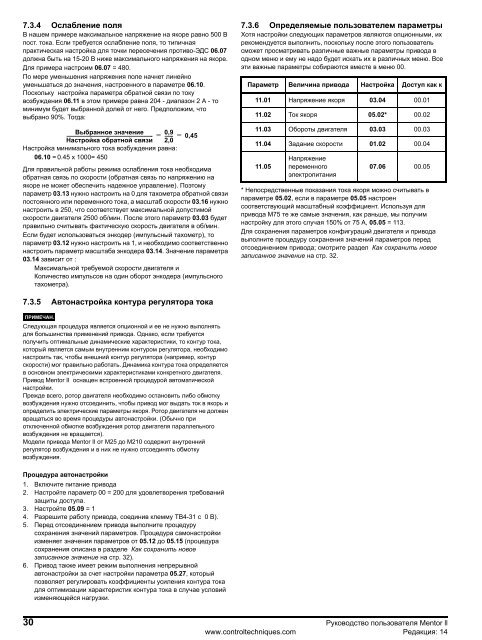
7.3.6 Определяемые пользователем параметры<br />
Хотя настройки следующих параметров являются опционными, их<br />
рекомендуется выполнить, поскольку после этого пользователь<br />
сможет просматривать различные важные параметры привода в<br />
одном меню и ему не надо будет искать их в различных меню. Все<br />
эти важные параметры собираются вместе в меню 00.<br />
Параметр Величина привода Настройка Доступ как к<br />
11.01 Напряжение якоря 03.04 00.01<br />
11.02 Ток якоря 05.02* 00.02<br />
11.03 Обороты двигателя 03.03 00.03<br />
11.04 Задание скорости 01.02 00.04<br />
11.05<br />
Напряжение<br />
переменного<br />
электропитания<br />
07.06 00.05<br />
* Непосредственные показания тока якоря можно считывать в<br />
параметре 05.02, если в параметре 05.05 настроен<br />
соответствующий масштабный коэффициент. Используя для<br />
привода M75 те же самые значения, как раньше, мы получим<br />
настройку для этого случая 150% от 75 A, 05.05 = 113.<br />
Для сохранения параметров конфигураций двигателя и привода<br />
выполните процедуру сохранения значений параметров перед<br />
отсоединением привода; смотрите раздел Как сохранить новое<br />
записанное значение на стр. 32.<br />
7.3.5 Автонастройка контура регулятора тока<br />
ПРИМЕЧАН.<br />
N<br />
Следующая процедура является опционной и ее не нужно выполнять<br />
для большинства применений привода. Однако, если требуется<br />
получить оптимальные динамические характеристики, то контур тока,<br />
который является самым внутренним контуром регулятора, необходимо<br />
настроить так, чтобы внешний контур регулятора (например, контур<br />
скорости) мог правильно работать. Динамика контура тока определяется<br />
в основном электрическими характеристиками конкретного двигателя.<br />
Привод <strong>Mentor</strong> <strong>II</strong> оснащен встроенной процедурой автоматической<br />
настройки.<br />
Прежде всего, ротор двигателя необходимо остановить либо обмотку<br />
возбуждения нужно отсоединить, чтобы привод мог выдать ток в якорь и<br />
определить электрические параметры якоря. Ротор двигателя не должен<br />
вращаться во время процедуры автонастройки. (Обычно при<br />
отключенной обмотке возбуждения ротор двигателя параллельного<br />
возбуждения не вращается).<br />
Модели привода <strong>Mentor</strong> <strong>II</strong> от M25 до M210 содержит внутренний<br />
регулятор возбуждения и в них не нужно отсоединять обмотку<br />
возбуждения.<br />
Процедура автонастройки<br />
1. Включите питание привода<br />
2. Настройте параметр 00 = 200 для удовлетворения требований<br />
защиты доступа.<br />
3. Настройте 05.09 = 1<br />
4. Разрешите работу привода, соединив клемму TB4-31 с 0 В).<br />
5. Перед отсоединением привода выполните процедуру<br />
сохранения значений параметров. Процедура самонастройки<br />
изменяет значения параметров от 05.12 до 05.15 (процедура<br />
сохранения описана в разделе Как сохранить новое<br />
записанное значение на стр. 32).<br />
6. Привод также имеет режим выполнения непрерывной<br />
автонастройки за счет настройки параметра 05.27, который<br />
позволяет регулировать коэффициенты усиления контура тока<br />
для оптимизации характеристик контура тока в случае условий<br />
изменяющейся нагрузки.<br />
30 Руководство пользователя <strong>Mentor</strong> ll<br />
www.controltechniques.com Редакция: 14













