GRAFCET - Ingeniero Borda & Asociados
GRAFCET - Ingeniero Borda & Asociados
GRAFCET - Ingeniero Borda & Asociados

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2005<br />
2005<br />
Universidad de Oviedo<br />
Universidad de Oviedo<br />
<strong>GRAFCET</strong><br />
Regulación Automática II<br />
Antonio Robles Álvarez<br />
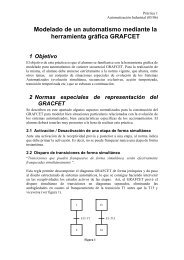
Índice<br />
• Introducción. Necesidad de metodologías.<br />
• ¿Cómo abordar la descripción de un sistema automatizado?<br />
• Modelo <strong>GRAFCET</strong>.<br />
• Estructuras básicas.<br />
• Estudio de las órdenes o acciones<br />
• Macrorrepresentaciones<br />
• Forzado y paralización de estados.<br />
• <strong>GRAFCET</strong> jerarquizado.<br />
• Materialización de un <strong>GRAFCET</strong> en un autómata programable.<br />
• Herramientas de construcción de <strong>GRAFCET</strong>.<br />
Regulación Automática II<br />
1<br />
2<br />
1
2005<br />
2005<br />
Universidad de Oviedo<br />
Necesidad de metodologías<br />
• La automatización de instalaciones constituye uno de<br />
los factores esenciales en la mejora de la<br />
productividad.<br />
• El avance de la técnica permite cada vez abordar<br />
automatizaciones más complejas.<br />
• Aparece la necesidad de disponer de métodos de<br />
análisis y síntesis apropiados.<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Métodos<br />
• Tablas de Karnaugh<br />
• Cronogramas<br />
• Diagrama de fases<br />
• Método Huffman o método matricial<br />
• Logigrama<br />
• Organigrama<br />
• Técnica de paso a paso<br />
• Método en cascada<br />
• Organifase<br />
Regulación Automática II<br />
3<br />
4<br />
2
2005<br />
2005<br />
Universidad de Oviedo<br />
Evolución<br />
• El más prometedor parecía el paso a paso. A partir<br />
de él surgieron los secuenciadores: neumáticos, a<br />
base de relés, electrónicos, etc.<br />
• Su puesta en práctica variaba con el modelo y con el<br />
fabricante.<br />
• Se plantea la necesidad de un método de análisis<br />
independiente del material.<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Historia de <strong>GRAFCET</strong> (I)<br />
• 1962 Redes de Petri (más teórico, menos práctico)<br />
• 1975 Se crea una Comisión para la normalización de la<br />
representación del pliego de condiciones de los<br />
automatismos lógicos en la AFCET<br />
• 1977 De los trabajos de esta comisión nace <strong>GRAFCET</strong>.<br />
ADEPA se encarga de su difusión.<br />
• 1982 Norma francesa: NFC 03-190<br />
• 1985 GREPA añade nuevos conceptos<br />
Regulación Automática II<br />
5<br />
6<br />
3
2005<br />
2005<br />
Universidad de Oviedo<br />
Historia de <strong>GRAFCET</strong> (II)<br />
• 1988 CEI 848 (Ahora 60848) Base de SFC.<br />
• 1990 UTE C 03-190<br />
• 1992 CEI 61131-3 Programación de autómatas<br />
(incluye SFC)<br />
• 1993 UTE C 03-191<br />
• 1995 Reedición de norma francesa que no incluye<br />
los cambios de la UTE<br />
• 2002 CEI 60848 Ed. 2<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
ACRÓNIMOS (I)<br />
• ADEPA (Agence nationale pour le DEveloppemment<br />
de la Production Automatisée)<br />
• AFCET (Association Française pour la Cybernétique<br />
Economique et Technique)<br />
• CEI (Comisión Electrotécnica Internacional)<br />
• EN (European Norms)<br />
• GEMMA (Guide d’Etude des Modes de Marche et<br />
d’Arrêt)<br />
Regulación Automática II<br />
7<br />
8<br />
4
2005<br />
2005<br />
Universidad de Oviedo<br />
ACRÓNIMOS (II)<br />
• <strong>GRAFCET</strong> (GRAphe Fonctionel de Commande,<br />
Etapes, Transitions)<br />
• GREPA (Groupe Equipement de Production<br />
Automatisée)<br />
• NF (Norme Française)<br />
• SFC (Sequential Function Chart)<br />
• UTE (Union Technique de l’Électricité)<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Problema propuesto<br />
Regulación Automática II<br />
9<br />
10<br />
5
2005<br />
Universidad de Oviedo<br />
Análisis descendente del automatismo<br />
• Búsqueda de las funciones y de las restricciones<br />
– Función global<br />
– Funciones principales<br />
– Funciones secundarias<br />
• Inventario de las tareas (asociadas a las funciones<br />
secundarias)<br />
– Una tarea puede ser una acción o conjunto de acciones.<br />
• Coordinación de las tareas<br />
• Descripción del ciclo automático de la máquina<br />
Universidad de Oviedo<br />
alimentación<br />
de materia<br />
prima (barra)<br />
2005<br />
manual<br />
Regulación Automática II<br />
Búsqueda de las funciones y de las<br />
restricciones<br />
Automatización de una sierra circular<br />
bloqueo<br />
de la<br />
barra<br />
desplazamiento<br />
del brazo<br />
corte de<br />
la barra<br />
Regulación Automática II<br />
evacuación<br />
del trozo<br />
gravedad<br />
11<br />
Función global<br />
Funciones<br />
principales<br />
12<br />
6
2005<br />
2005<br />
Universidad de Oviedo<br />
Funciones secundarias y restricciones<br />
Funciones<br />
principales<br />
Bloqueo de la<br />
barra<br />
Corte de la barra<br />
Desplazamiento<br />
del brazo<br />
Restricciones<br />
Universidad de Oviedo<br />
Capacidad de apertura máxima, carrera<br />
de sujeción, esfuerzo de apriete en<br />
función de los esfuerzos de avance y<br />
corte, velocidad<br />
Naturaleza del material de la sierra:<br />
carburo o acero rápido, velocidad de<br />
corte, desgaste, calentamiento.<br />
Esfuerzo de corte, longitud de corte<br />
mínimo-máximo.<br />
Naturaleza del producto, caudal, bomba,<br />
motor<br />
Esfuerzo reducido, velocidad, carrera<br />
regulable.<br />
Regulación Automática II<br />
Funciones secundarias<br />
→ sujeción<br />
→ suelta<br />
Inventario de las tareas (I)<br />
Regulación Automática II<br />
→corte→rotación → marcha<br />
→ parada<br />
→lubricación → marcha<br />
(manual) → parada<br />
→ descenso → aprox. rápida<br />
→ avance lento<br />
→ ascenso<br />
• T1: función sujeción de la barra<br />
• T2: función suelta de la barra<br />
• T3: función puesta en marcha de la sierra<br />
• T4: función parada de la sierra<br />
• T5: función descenso con aproximación rápida del<br />
brazo<br />
• T6: función descenso con avance lento del brazo<br />
• T7: función ascenso del brazo<br />
13<br />
14<br />
7
2005<br />
Universidad de Oviedo<br />
Inventario de las tareas (II)<br />
Además, para casi cualquier automatismo hace falta:<br />
• T8: función preparación del puesto de trabajo<br />
(manual)<br />
• T9: función puesta en referencia<br />
• Funciones de protección del material y del operador<br />
2005<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Coordinación de las tareas<br />
Para cada tarea se pueden plantear las siguientes preguntas:<br />
• ¿Cuáles son las condiciones que autorizan el arranque de una<br />
tarea?<br />
(arranque si condiciones entonces ejecutar tarea)<br />
• ¿Cuáles son las condiciones que verifican que la tarea ha<br />
terminado?<br />
(fin si condiciones)<br />
• ¿Qué tareas son autorizadas a continuación?<br />
(fin autoriza tareas siguientes)<br />
Y presentar la información en forma algorítmica.<br />
Regulación Automática II<br />
15<br />
16<br />
8
2005<br />
2005<br />
Universidad de Oviedo<br />
Aplicación de coordinación<br />
Tarea T1 (sujeción de la barra)<br />
arranque si la máquina está en referencia (fin T9)<br />
y si la barra está en tope<br />
y si la bomba está en marcha<br />
y si se autoriza el arranque de ciclo<br />
entonces sujetar la barra<br />
fin si la barra está sujeta<br />
fin autoriza el arranque de la tarea T3<br />
(puesta en marcha de la sierra)<br />
Universidad de Oviedo<br />
Descripción del ciclo<br />
automático de la<br />
máquina<br />
Regulación Automática II<br />
Regulación Automática II<br />
17<br />
18<br />
9
2005<br />
2005<br />
Universidad de Oviedo<br />
Descripción por<br />
<strong>GRAFCET</strong> teniendo<br />
en cuenta las<br />
opciones<br />
tecnológicas<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Índice<br />
• Introducción. Necesidad de metodologías.<br />
• ¿Cómo abordar la descripción de un sistema automatizado?<br />
• Modelo <strong>GRAFCET</strong>.<br />
• Estructuras básicas.<br />
• Estudio de las órdenes o acciones<br />
• Macrorrepresentaciones<br />
• Forzado y paralización de estados.<br />
• <strong>GRAFCET</strong> jerarquizado.<br />
• Materialización de un <strong>GRAFCET</strong> en un autómata programable.<br />
• Herramientas de construcción de <strong>GRAFCET</strong>.<br />
Regulación Automática II<br />
19<br />
20<br />
10
2005<br />
Universidad de Oviedo<br />
¿Cómo abordar la descripción de un<br />
sistema automatizado?<br />
• Primer tipo de aproximación:<br />
Descomposición: PR-PC-PO<br />
• Segundo tipo de aproximación:<br />
– dimensión “punto de vista”: proceso, PC,<br />
realizador<br />
– dimensión “especificaciones”: funcionales,<br />
tecnológicas, operacionales<br />
– dimensión “detalle”: global, intermedia, detallada<br />
2005<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Descomposición PR-PC-PO<br />
PARTE de CONTROL<br />
(P.C.)<br />
órdenes<br />
PARTE de RELACIÓN<br />
(P.R.)<br />
órdenes<br />
informaciones<br />
informaciones<br />
Regulación Automática II<br />
PARTE OPERATIVA<br />
(P.O.)<br />
21<br />
22<br />
11
2005<br />
Universidad de Oviedo<br />
Dimensión “punto de vista”<br />
• Descripción de la PC hecha por un observador<br />
situado en un punto de vista:<br />
– Externo al sistema (proceso)<br />
– Interno al SAP, y externo a la PC (PC)<br />
– Interno a la PC (realizador)<br />
Universidad de Oviedo<br />
Punto de vista del<br />
proceso<br />
2005<br />
Regulación Automática II<br />
Posición del observador<br />
según el “punto de vista”<br />
PARTE de<br />
CONTROL<br />
(PC)<br />
Punto de vista del<br />
realizador<br />
Regulación Automática II<br />
PARTE OPERATIVA<br />
(PO)<br />
Punto de vista de la PC<br />
PARTE de RELACIÓN<br />
(PR)<br />
23<br />
24<br />
12
2005<br />
Universidad de Oviedo<br />
Punto de vista del proceso<br />
• Describe el comportamiento de PC y PO<br />
independientemente de la elección tecnológica,<br />
teniendo en cuenta las especificaciones funcionales.<br />
• Precisa un inventario de las funciones principales, de<br />
la funciones secundarias, y después de las tareas en<br />
que se descomponen.<br />
• Gráfico de Coordinación de las Tareas. Estudio de<br />
viabilidad, estimación de las cadencias de<br />
producción que pueden ser obtenidas.<br />
2005<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Punto de vista de la PC<br />
• Describe el funcionamiento de la PC, teniendo en<br />
cuenta:<br />
– las elecciones tecnológicas hechas para los mecanismos, y<br />
bloques operativos<br />
– los captadores suministran las informaciones necesarias<br />
para el control de las evoluciones del sistema<br />
• Se puede estructurar la descripción a este nivel en<br />
forma de un conjunto de <strong>GRAFCET</strong>.<br />
• Se puede completar la descripción con un estudio de<br />
los modos de marcha y parada (GEMMA)<br />
Regulación Automática II<br />
25<br />
26<br />
13
Universidad de Oviedo<br />
<strong>GRAFCET</strong> de las tareas<br />
2005<br />
2005<br />
Universidad de Oviedo<br />
Jerarquía entre <strong>GRAFCET</strong><br />
<strong>GRAFCET</strong> de vigilancia<br />
<strong>GRAFCET</strong> de conducción<br />
<strong>GRAFCET</strong> de coordinación de tareas<br />
<strong>GRAFCET</strong> de subprogramas <strong>GRAFCET</strong> particulares<br />
Regulación Automática II<br />
Punto de vista del realizador<br />
• Describe el automatismo en su versión definitiva, tras<br />
haber:<br />
– Hecho una elección tecnológica de la PC (solución<br />
cableada, programada o mixta).<br />
– Elegido los preaccionadores en tipo y modo de mando<br />
– Trasladado o no a los componentes externos a la PC,<br />
ciertos tratamientos (memoria, temporización, contaje)<br />
– Definido las características y las de los elementos que se<br />
implantarán en la PC. En un autómata: nº E/S, memoria,<br />
potencia de cálculo, velocidad de adquisición y conversión,<br />
lenguajes disponibles, etc.<br />
Regulación Automática II<br />
27<br />
28<br />
14
2005<br />
Universidad de Oviedo<br />
Niveles de <strong>GRAFCET</strong><br />
• Nivel 1: Punto de vista del proceso<br />
• Nivel 2: Punto de vista de la PC<br />
• Nivel 3: Punto de vista del realizador<br />
2005<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Índice<br />
• Introducción. Necesidad de metodologías.<br />
• ¿Cómo abordar la descripción de un sistema automatizado?<br />
• Modelo <strong>GRAFCET</strong>.<br />
• Estructuras básicas.<br />
• Estudio de las órdenes o acciones<br />
• Macrorrepresentaciones<br />
• Forzado y paralización de estados.<br />
• <strong>GRAFCET</strong> jerarquizado.<br />
• Materialización de un <strong>GRAFCET</strong> en un autómata programable.<br />
• Herramientas de construcción de <strong>GRAFCET</strong>.<br />
Regulación Automática II<br />
29<br />
30<br />
15
2005<br />
Universidad de Oviedo<br />
Modelo <strong>GRAFCET</strong><br />
• Modelo de representación gráfica del<br />
comportamiento de la parte de mando de un sistema<br />
automatizado.<br />
• Está constituido por:<br />
– Elementos gráficos básicos (etapas, transiciones<br />
y arcos orientados)<br />
– Interpretación (acciones y receptividades)<br />
– 5 reglas de evolución<br />
– Postulado sobre la duración relativa de las<br />
evoluciones<br />
2005<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Elementos gráficos básicos<br />
• Etapas<br />
• Transiciones<br />
• Arcos orientados: enlazan las etapas y transiciones,<br />
estructuradas en una red que alterna etapatransición-etapa,<br />
y que forma el esqueleto secuencial<br />
gráfico del <strong>GRAFCET</strong>.<br />
Regulación Automática II<br />
31<br />
32<br />
16
2005<br />
2005<br />
Universidad de Oviedo<br />
Etapa<br />
Corresponde a una situación en la que el<br />
comportamiento de la P.C. no varía<br />
10<br />
Espera<br />
En un instante dado la etapa puede estar:<br />
• Activa<br />
• Inactiva<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Etapa (II)<br />
• El estado interno de la parte de control se define por<br />
las etapas que está activas en un instante dado. Se<br />
puede expresar así:<br />
S(Gn) = {1, 3, 7, ..., 28}<br />
• Etapas iniciales e inicializables:<br />
10 10<br />
X14 ><br />
Regulación Automática II<br />
33<br />
34<br />
17
2005<br />
2005<br />
Universidad de Oviedo<br />
Acciones asociadas a la etapa<br />
• Las acciones indican lo que se debe hacer cada vez<br />
que se active la etapa a la que están asociadas.<br />
10<br />
Universidad de Oviedo<br />
Acción A Acción B Acción C<br />
Regulación Automática II<br />
Transiciones<br />
Regulación Automática II<br />
10<br />
Acción A<br />
Acción B<br />
Acción C<br />
• Señalan la posibilidad de transición entre una o<br />
varias etapas.<br />
• Una transición puede estar:<br />
– validada si todas las etapas inmediatamente precedentes<br />
están activas,<br />
– no validada.<br />
• La transición se franquea obligatoriamente cuando<br />
está validada y se verifica la receptividad (función<br />
lógica) asociada.<br />
35<br />
36<br />
18
2005<br />
2005<br />
Universidad de Oviedo<br />
(1)<br />
(2)<br />
10<br />
11<br />
12<br />
r(10 → 11)<br />
r(11 → 12)<br />
Universidad de Oviedo<br />
Transiciones (II)<br />
Regulación Automática II<br />
Receptividades<br />
Regulación Automática II<br />
21 22<br />
23<br />
r(21,22 → 23)<br />
• A cada transición hay asociada una expresión lógica<br />
llamada receptividad.<br />
• La receptividad agrupa informaciones de diferentes<br />
fuentes:<br />
– PR (pulsadores, interruptores, selectores, ...)<br />
– PO (sensores)<br />
– PC (temporizadores, contadores, resultados de cálculos,<br />
estados de otras etapas Xi, ...)<br />
– condición siempre cierta (=1)<br />
• La información puede ser de nivel mantenido o de<br />
tipo flanco (ascendente ↑ o descendente ↓)<br />
37<br />
38<br />
19
2005<br />
2005<br />
Universidad de Oviedo<br />
Receptividades (II)<br />
• Las relaciones lógicas se representan:<br />
– Y con un punto « . »<br />
– O con el signo más « + »<br />
– NO con la barra inclinada « / »<br />
13<br />
14<br />
Universidad de Oviedo<br />
↑a.(b+c)<br />
Regulación Automática II<br />
Arcos orientados<br />
Regulación Automática II<br />
15<br />
16<br />
t1/X15/2s<br />
• Unen las etapas con las transiciones<br />
• Indican la vía que siguen las evoluciones<br />
• Se representan con líneas verticales y horizontales. Se<br />
desaconsejan las oblicuas.<br />
• Por convención el sentido es de arriba abajo.<br />
• Se usarán flechas cuando:<br />
– No se respete la convención (abajo arriba).<br />
– Para evitar errores de interpretación en las evoluciones a lo<br />
largo de líneas horizontales.<br />
• Habrá doble trazado horizontal si hay que reagrupar varios<br />
enlaces ligados a la misma transición<br />
39<br />
40<br />
20
2005<br />
Universidad de Oviedo<br />
Reglas de sintaxis<br />
• Un <strong>GRAFCET</strong> está correctamente trazado si:<br />
– Respeta la regla de alternancia etapa-transición y transiciónetapa.<br />
• Por lo tanto:<br />
2005<br />
– dos etapas no pueden unirse directamente,<br />
– no puede haber dos transiciones consecutivas.<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Reglas de evolución<br />
Regla 1. Relativa a la situación inicial de la PC<br />
– La situación inicial del <strong>GRAFCET</strong> caracteriza el comportamiento<br />
inicial de la PC respecto a la PO y corresponde al conjunto de las<br />
etapas activas, autorizando el comienzo del funcionamiento.<br />
Regla 2. Relativa al franqueo de una transición<br />
– La evolución de la situación del <strong>GRAFCET</strong> correspondiente al<br />
franqueo de una transición no se puede producir a menos que:<br />
• esta transición esté validada,<br />
• y la receptividad asociada sea cierta.<br />
– Esta condición recibe el nombre de función de transición<br />
Regulación Automática II<br />
41<br />
42<br />
21
2005<br />
2005<br />
Universidad de Oviedo<br />
Reglas de evolución<br />
Regla 3. Relativa a la evolución de la situación de la PC<br />
– El franqueo de una transición entraña simultáneamente la activación<br />
de todas las etapas inmediatamente siguientes y la desactivación de<br />
todas las etapas inmediatamente precedentes (evolución síncrona).<br />
Regla 4. Relativa a las evoluciones simultáneas<br />
– Varias transiciones simultáneamente franqueables son<br />
simultáneamente franqueadas.<br />
Regla 5. Relativa a la activación y desactivación simultánea de una<br />
misma etapa<br />
– Si en el curso de una evolución, una misma etapa se encuentra a la<br />
vez activada y desactivada, permanece activada.<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Casos particulares de<br />
reglas de evolución<br />
• Transición siempre validada<br />
• Transición fuente y transición sumidero<br />
• Registro de desplazamiento<br />
• Registro de apilado<br />
• Registro de desapilado<br />
Regulación Automática II<br />
43<br />
44<br />
22
2005<br />
2005<br />
Universidad de Oviedo<br />
Transición siempre validada<br />
00<br />
Universidad de Oviedo<br />
• Por definición:<br />
↑ fallo<br />
01<br />
r1<br />
Regulación Automática II<br />
Regulación Automática II<br />
01<br />
↑ fallo<br />
Transiciones fuente y sumidero<br />
– Una transición fuente es una transición sin etapa precedente<br />
y por tanto está siempre validada<br />
– Una transición sumidero es una transición sin etapa<br />
inmediatamente posterior.<br />
07<br />
r1<br />
d0<br />
c0<br />
45<br />
46<br />
23
2005<br />
2005<br />
Universidad de Oviedo<br />
Universidad de Oviedo<br />
Registro de desplazamiento<br />
Regulación Automática II<br />
Registro de desplazamiento (II)<br />
Regulación Automática II<br />
47<br />
48<br />
24
2005<br />
2005<br />
Universidad de Oviedo<br />
Universidad de Oviedo<br />
Registro de apilado<br />
Regulación Automática II<br />
Registro de apilado (II)<br />
Regulación Automática II<br />
49<br />
50<br />
25
2005<br />
2005<br />
Universidad de Oviedo<br />
Universidad de Oviedo<br />
Registro de desapilado<br />
Regulación Automática II<br />
Postulado sobre la duración<br />
• La duración del franqueo de una transición puede ser<br />
considerada tan pequeña como se quiera pero no<br />
nula<br />
• La duración de la activación de una etapa no puede<br />
ser considerada nula<br />
• El modelo <strong>GRAFCET</strong>:<br />
– excluye formalmente la simultaneidad de dos eventos<br />
externos a la P.C. no correlacionados<br />
– Impone la simultaneidad de ocurrencia de los eventos<br />
internos a la P.C.<br />
Regulación Automática II<br />
51<br />
52<br />
26
2005<br />
2005<br />
Universidad de Oviedo<br />
Índice<br />
• Introducción. Necesidad de metodologías.<br />
• ¿Cómo abordar la descripción de un sistema automatizado?<br />
• Modelo <strong>GRAFCET</strong>.<br />
• Estructuras básicas.<br />
• Estudio de las órdenes o acciones<br />
• Macrorrepresentaciones<br />
• Forzado y paralización de estados.<br />
• <strong>GRAFCET</strong> jerarquizado.<br />
• Materialización de un <strong>GRAFCET</strong> en un autómata programable.<br />
• Herramientas de construcción de <strong>GRAFCET</strong>.<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Estructuras básicas<br />
• Secuencia única<br />
• Secuencias simultáneas (Paralelismo estructural)<br />
• Selección de secuencia<br />
– Secuencias exclusivas (exclusividad lógica, tecnológica,<br />
prioridad)<br />
– Salto de etapas<br />
– Repetición de secuencia<br />
– Selección alternativa por semáforo<br />
– Paralelismo interpretado<br />
Regulación Automática II<br />
53<br />
54<br />
27
2005<br />
2005<br />
Universidad de Oviedo<br />
Universidad de Oviedo<br />
Secuencia única<br />
2<br />
3<br />
T1<br />
T2<br />
Regulación Automática II<br />
Secuencias simultáneas (paralelismo estructural)<br />
3<br />
9<br />
Regulación Automática II<br />
2<br />
20<br />
T1<br />
T2<br />
T19<br />
10<br />
19<br />
55<br />
56<br />
28
2005<br />
2005<br />
Universidad de Oviedo<br />
Universidad de Oviedo<br />
• Exclusividad lógica:<br />
Selección de secuencia<br />
3<br />
9<br />
T1<br />
T9<br />
Regulación Automática II<br />
2<br />
20<br />
10<br />
19<br />
Regulación Automática II<br />
T2<br />
T19<br />
Secuencias exclusivas<br />
– T1 = a./b T2 = /a.b<br />
• Exclusividad tecnológica:<br />
– T1 = a0.a T2 = a1.b<br />
• Exclusividad por prioridad:<br />
– T1 = a T2 = /a.b<br />
57<br />
58<br />
29
2005<br />
2005<br />
Universidad de Oviedo<br />
Universidad de Oviedo<br />
Salto de etapas<br />
/T3<br />
Regulación Automática II<br />
Repetición de secuencia<br />
Tr<br />
3<br />
4<br />
5<br />
T2<br />
T3<br />
T4<br />
Regulación Automática II<br />
4<br />
5<br />
6<br />
7<br />
T3<br />
T4<br />
T5<br />
/Tr<br />
59<br />
60<br />
30
2005<br />
2005<br />
Universidad de Oviedo<br />
Universidad de Oviedo<br />
Paralelismo interpretado<br />
3<br />
9<br />
T1<br />
T9<br />
Regulación Automática II<br />
2<br />
20<br />
Índice<br />
• Introducción. Necesidad de metodologías.<br />
• ¿Cómo abordar la descripción de un sistema automatizado?<br />
• Modelo <strong>GRAFCET</strong>.<br />
• Estructuras básicas.<br />
• Estudio de las órdenes o acciones<br />
• Macrorrepresentaciones<br />
• Forzado y paralización de estados.<br />
• <strong>GRAFCET</strong> jerarquizado.<br />
• Materialización de un <strong>GRAFCET</strong> en un autómata programable.<br />
• Herramientas de construcción de <strong>GRAFCET</strong>.<br />
10<br />
19<br />
Regulación Automática II<br />
T2<br />
T19<br />
61<br />
62<br />
31
2005<br />
2005<br />
Universidad de Oviedo<br />
Estudio de acciones u órdenes<br />
• Las acciones pueden ser de naturaleza binaria,<br />
analógica, numérica o alfanumérica.<br />
• A nivel 1, el término “acción” encubre además la<br />
función de asegurar que una tarea se va a ejecutar.<br />
• A nivel 2 o 3 se trata sobre todo de órdenes a los<br />
preaccionadores.<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Estudio de acciones u órdenes (II)<br />
• Teniendo en cuenta la duración de activación de la<br />
etapa:<br />
– Continua o por nivel<br />
– Condicional (C)<br />
– Retardada (D)<br />
– Duración limitada (L)<br />
– Impulsional o puntual (P)<br />
– Mantenida o memorizada (S)<br />
Regulación Automática II<br />
63<br />
64<br />
32
2005<br />
Universidad de Oviedo<br />
Acción mantenida o memorizada<br />
• El efecto debe continuar durante varias etapas<br />
consecutivas<br />
• Descripciones posibles:<br />
2005<br />
– Asociación de la acción a todas las etapas implicadas<br />
– Asociación a una etapa de un paralelismo estructural<br />
– Memorización de la acción por medio de un <strong>GRAFCET</strong><br />
particular<br />
– Empleo de instrucciones SET y RESET de la PC<br />
– Empleo de un operador de memoria externo a la PC:<br />
• Componentes biestables<br />
• Realización cableada con componentes monoestables<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Estudio de acciones u órdenes (III)<br />
• Órdenes emitidas por las etapas para modificar la<br />
situación interna de la PC:<br />
– Lanzamiento de <strong>GRAFCET</strong> de subprogramas o de tareas<br />
– Lanzamiento de ramas de <strong>GRAFCET</strong> (macroetapas)<br />
– Forzado y paralización de la situación<br />
– Selección de los modos de marcha y parada<br />
– Petición de cálculo o de tratamiento de texto<br />
Regulación Automática II<br />
65<br />
66<br />
33
2005<br />
2005<br />
Universidad de Oviedo<br />
Índice<br />
• Introducción. Necesidad de metodologías.<br />
• ¿Cómo abordar la descripción de un sistema automatizado?<br />
• Modelo <strong>GRAFCET</strong>.<br />
• Estructuras básicas.<br />
• Estudio de las órdenes o acciones<br />
• Macrorrepresentaciones<br />
• Forzado y paralización de estados.<br />
• <strong>GRAFCET</strong> jerarquizado.<br />
• Materialización de un <strong>GRAFCET</strong> en un autómata programable.<br />
• Herramientas de construcción de <strong>GRAFCET</strong>.<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Macrorrepresentaciones<br />
• Permiten realizar una descripción de ciertas<br />
secuencias agrupadas en:<br />
– Tareas: conjunto de acciones que corresponde a la<br />
ejecución de una función determinada<br />
– Subprogramas: conjunto de acciones o de tareas que deben<br />
ser ejecutadas varias veces en el mismo ciclo de producción<br />
• Se estudiarán dos conceptos:<br />
– Lanzamiento de <strong>GRAFCET</strong> subprograma, o <strong>GRAFCET</strong> de<br />
tarea<br />
– Macroetapa asociada a su expansión<br />
Regulación Automática II<br />
67<br />
68<br />
34
2005<br />
2005<br />
Universidad de Oviedo<br />
10<br />
10<br />
S/P1<br />
Representación de subprogramas<br />
S/P1<br />
Universidad de Oviedo<br />
10<br />
Regulación Automática II<br />
<strong>GRAFCET</strong> subprograma<br />
10<br />
T3<br />
Regulación Automática II<br />
Tarea 3<br />
• La estructura de un <strong>GRAFCET</strong> subprograma o de<br />
un <strong>GRAFCET</strong> de tarea se caracteriza por:<br />
– Una etapa de entrada, necesaria para el lanzamiento<br />
– Una etapa de salida que señala el fin de la ejecución<br />
– Estas dos etapas no pueden tener acciones asociadas<br />
• La coordinación entre el <strong>GRAFCET</strong> principal y el<br />
subprograma puede ser:<br />
– Asíncrona: llamada-respuesta<br />
– Síncrona: elimina la etapa de salida (regla 4).<br />
69<br />
70<br />
35
2005<br />
2005<br />
Universidad de Oviedo<br />
GP: <strong>GRAFCET</strong> Principal<br />
20<br />
21<br />
22<br />
23<br />
24<br />
Coordinación asíncrona<br />
pm.ci<br />
a1<br />
X38<br />
a0<br />
X38<br />
A+<br />
S/P1<br />
A–<br />
S/P1<br />
Universidad de Oviedo<br />
GP: <strong>GRAFCET</strong> Principal<br />
20<br />
21<br />
22<br />
23<br />
24<br />
Regulación Automática II<br />
<strong>GRAFCET</strong> S/P1<br />
Coordinación síncrona<br />
pm.ci<br />
a1<br />
X37.b0<br />
a0<br />
A+<br />
X37.b0<br />
S/P1<br />
A–<br />
S/P1<br />
Regulación Automática II<br />
30<br />
31<br />
37<br />
38<br />
X22 + X24<br />
b1<br />
b0<br />
<strong>GRAFCET</strong> S/P1<br />
30<br />
31<br />
37<br />
B+<br />
B–<br />
/X22./X24<br />
X22 + X24<br />
b1<br />
b0<br />
B+<br />
B–<br />
También es posible<br />
X23 + X20<br />
71<br />
72<br />
36
2005<br />
Universidad de Oviedo<br />
Macroetapa y expansión<br />
• La macroetapa es una representación unificada de<br />
un conjunto de etapas y de transiciones llamada<br />
expansión.<br />
• La macroetapa no tiene existencia física y no puede<br />
ser asimilada a una etapa, pues las reglas de<br />
<strong>GRAFCET</strong> no serían respetadas.<br />
• No se debe asociar por tanto ninguna acción a una<br />
macroetapa<br />
2005<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Representación de Macroetapas<br />
<strong>GRAFCET</strong> de Gestión<br />
10<br />
11<br />
M1<br />
12<br />
=1<br />
Regulación Automática II<br />
Expansión XM1 de la macroetapa M1<br />
100<br />
E<br />
101<br />
102<br />
S<br />
73<br />
74<br />
37
2005<br />
Universidad de Oviedo<br />
Estructura de la expansión<br />
• La expansión siempre tiene una etapa de entrada (E)<br />
y otra de salida (S).<br />
• La etapa de entrada es una etapa normal. No puede<br />
ser etapa inicial.<br />
• No se debe asociar acción a la etapa de salida<br />
• La transición después de la macroetapa es siempre<br />
cierta (=1)<br />
2005<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Interés y limitaciones de las<br />
macrorrepresentaciones<br />
• Las macrorrepresentaciones permiten evitar el ocuparse de<br />
detalles inútiles en el comienzo del análisis y consagrarse<br />
únicamente al análisis de las tareas y su coordinación<br />
• La descomposición en tareas y subprogramas permite<br />
estructurar mejor el conjunto de la descripción por <strong>GRAFCET</strong> y<br />
ahorrar memoria en los autómatas<br />
• Las macroetapas y sus expansiones asociadas son de gran<br />
interés aunque se haga el diseño manualmente<br />
• El concepto de subprograma <strong>GRAFCET</strong> o de tarea presenta la<br />
ventaja de ser independiente del lenguaje del autómata.<br />
Regulación Automática II<br />
75<br />
76<br />
38
2005<br />
2005<br />
Universidad de Oviedo<br />
Índice<br />
• Introducción. Necesidad de metodologías.<br />
• ¿Cómo abordar la descripción de un sistema automatizado?<br />
• Modelo <strong>GRAFCET</strong>.<br />
• Estructuras básicas.<br />
• Estudio de las órdenes o acciones<br />
• Macrorrepresentaciones<br />
• Forzado y paralización de estados.<br />
• <strong>GRAFCET</strong> jerarquizado.<br />
• Materialización de un <strong>GRAFCET</strong> en un autómata programable.<br />
• Herramientas de construcción de <strong>GRAFCET</strong>.<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Forzado e inmovilización<br />
de situación<br />
• Por forzado de situación se entiende el paso<br />
impuesto de la situación actual del <strong>GRAFCET</strong> a una<br />
situación determinada distinta a la que se podría<br />
obtener por una evolución normal.<br />
• La situación del <strong>GRAFCET</strong> forzado evoluciona<br />
entonces sin franqueo de transición.<br />
• La orden solo puede ser emitida desde una etapa<br />
jerárquicamente superior contra un <strong>GRAFCET</strong><br />
jerárquicamente inferior.<br />
Regulación Automática II<br />
77<br />
78<br />
39
2005<br />
2005<br />
Universidad de Oviedo<br />
Ejemplo de jerarquía<br />
órdenes de forzado Nivel SEGURIDAD<br />
G0<br />
Universidad de Oviedo<br />
coordinación sin forzado<br />
coordinación sin forzado<br />
coordinación sin forzado<br />
G1<br />
G2<br />
Gn<br />
Regulación Automática II<br />
Regulación Automática II<br />
Gestión de energía y<br />
seguridad de la PO<br />
Nivel CONDUCCIÓN<br />
Gestión de los modos de<br />
marcha y parada<br />
Nivel PRODUCCIÓN<br />
Coordinación de las<br />
tareas de la producción<br />
normal<br />
Tareas, subprogramas,<br />
<strong>GRAFCET</strong>S particulares<br />
Forzado a situación no vacía<br />
<strong>GRAFCET</strong> G0 <strong>GRAFCET</strong> G1<br />
1<br />
S/G1 = {10}<br />
F/G1 > {10}<br />
S/G1 = {10} = X10./X11./X12./X13...<br />
X1 ><br />
10<br />
79<br />
80<br />
40
2005<br />
2005<br />
Universidad de Oviedo<br />
Forzado a situación vacía<br />
<strong>GRAFCET</strong> G0<br />
1<br />
S/G1 = { }<br />
F/G1 > { }<br />
S/G1 = { } = /X10./X11./X12./X13...<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Orden de forzado<br />
Regulación Automática II<br />
<strong>GRAFCET</strong> G1<br />
10<br />
X1 > F/G1 > { }<br />
• Un <strong>GRAFCET</strong> no puede ser forzado más que por un<br />
<strong>GRAFCET</strong> jerárquicamente superior.<br />
• Un <strong>GRAFCET</strong> inferior no puede ser forzado más<br />
que a una sola situación a la vez, a partir de uno o<br />
varios <strong>GRAFCET</strong>S superiores.<br />
• La orden de forzado es prioritaria sobre las otras<br />
condiciones que establecen la evolución del<br />
<strong>GRAFCET</strong> forzado.<br />
81<br />
82<br />
41
2005<br />
2005<br />
Universidad de Oviedo<br />
Orden de forzado (II)<br />
• Cuando se trata de un forzado de situación NO<br />
vacía, la orden de forzado provoca simultáneamente<br />
la activación de las etapas correspondientes a la<br />
situación impuesta, y la desactivación del resto.<br />
• Cuando se trata de un forzado de situación vacía, la<br />
emisión de la orden de forzado provoca<br />
simultáneamente la desactivación de todas las<br />
etapas del <strong>GRAFCET</strong> diseñado.<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Orden de inmovilización<br />
• No se trata tanto de forzar una situación sino al<br />
contrario, de bloquear la evolución del <strong>GRAFCET</strong><br />
<strong>GRAFCET</strong> G1<br />
13<br />
F/G2 > {* }<br />
Regulación Automática II<br />
<strong>GRAFCET</strong> G2<br />
20<br />
X13 > F/G2 > {* }<br />
83<br />
84<br />
42
2005<br />
2005<br />
Universidad de Oviedo<br />
Problemas por inmovilización<br />
• Se para la evolución pero las órdenes asociadas a<br />
las etapas activas siguen ejecutándose.<br />
Universidad de Oviedo<br />
<strong>GRAFCET</strong> G1<br />
14<br />
Regulación Automática II<br />
Forzado de las salidas<br />
12<br />
F/Salidas G2 =0<br />
F/Salidas =0<br />
Regulación Automática II<br />
<strong>GRAFCET</strong> G2<br />
20<br />
85<br />
X14 > F/Salidas G2 = 0<br />
86<br />
43
2005<br />
2005<br />
Universidad de Oviedo<br />
Índice<br />
• Introducción. Necesidad de metodologías.<br />
• ¿Cómo abordar la descripción de un sistema automatizado?<br />
• Modelo <strong>GRAFCET</strong>.<br />
• Estructuras básicas.<br />
• Estudio de las órdenes o acciones<br />
• Macrorrepresentaciones<br />
• Forzado y paralización de estados.<br />
• <strong>GRAFCET</strong> jerarquizado.<br />
• Materialización de un <strong>GRAFCET</strong> en un autómata<br />
programable.<br />
• Herramientas de construcción de <strong>GRAFCET</strong>.<br />
Universidad de Oviedo<br />
Regulación Automática II<br />
Materialización. Elementos básicos<br />
• Etapa: Su imagen debe tener dos estados<br />
estables ⇒ biestable<br />
• Transición y receptividad asociada:<br />
– Función de transición: ft(m -> n), ft(m, n -> p, q)<br />
– Receptividad: r(m ->n), r(m, n -> p, q)<br />
– ft(m -> n) = Xm.r(m -> n)<br />
– ft(m, n -> p, q) = Xm.Xn. r(m,n -> p, q)<br />
Regulación Automática II<br />
87<br />
88<br />
44
2005<br />
Universidad de Oviedo<br />
• Inicialización<br />
Materialización. Ecuaciones (I)<br />
– Inicialización manual<br />
– Inicialización automática (puede usar forzados)<br />
• Ecuaciones de etapas:<br />
2005<br />
– Biestable: S(Xi) = ftant<br />
R(Xi) = /ftant.ftsig<br />
– Monoestable: Xi = ftant + /ftsig.Xi<br />
Universidad de Oviedo<br />
• Incluyendo forzados:<br />
Regulación Automática II<br />
Materialización. Ecuaciones (II)<br />
– Biestable:<br />
Prioridad a 1 S(Xi) = FS + ftant<br />
R(Xi) = /FS./ftant.ftsig<br />
Prioridad a 0 S(Xi) = /FS.ftant<br />
R(Xi) = FS + /ftant.ftsig<br />
– Monoestable: Xi = ftant + /ftsig.Xi<br />
Prioridad a 1 Xi = FS + ftant + /ftsig.Xi<br />
Prioridad a 0 Xi = /FS.(ftant + /ftsig.Xi)<br />
Regulación Automática II<br />
89<br />
90<br />
45
2005<br />
Universidad de Oviedo<br />
A+ A-<br />
a0 a1<br />
.<br />
Dosificación de líquidos<br />
D<br />
PAP (avance paso a paso)<br />
pb (presencia botella)<br />
(1)<br />
(2)<br />
Regulación Automática II<br />
0<br />
1<br />
2<br />
pb.ac.a0<br />
a1<br />
/m.pb.a0<br />
A+ D<br />
A- PAP<br />
m.pb.a0<br />
91<br />
46